 基于多傳感器數據融合處理實現與城市三維空間和時間配準
基于多傳感器數據融合處理實現與城市三維空間和時間配準
引 言
城市三維空間信息的獲取是“數字城市”的基本工程,它具有位置性、多維性和時序性等特點,是“數字城市”中融合其他各種信息、形成在空間和時間上連續分布的城市綜合信息的基礎,這就決定了所獲取的城市三維空間信息應具有一定的位置精度、時間精度以及完整的空間坐標描述形式,而過去只依賴于某種特定傳感器的三維信息相對于這些要求就具有很大的局限性。因此,當前城市三維空間信息的獲取的趨勢是由利用單個特定傳感器獲取單一數據信息,向利用多個傳感器獲取多方面數據信息發展,將多種類型的傳感器進行優化配置信息互補,從而使得系統的精度得到很大提高。這就涉及到如何對多種傳感器進行信息獲取和信息融合的問題。
多傳感器數據融合處理的前提條件是從每個傳感器獲得的信息必須是在同一個空間的同一時刻的描述。這就包括2個方面:首先,要保證每個傳感器得到的信息是在同一坐標系下的描述,稱之為空間配準;其次,要保證各傳感器之間的數據應該在時間上對齊,稱之為時間配準,是上面所提到多傳感器融合中空間配準的關鍵,在車載式三維采集系統的動態工作環境下,時間對準問題表現得尤為突出。
因此,多傳感器信息的空間配準和時間配準成為城市三維空間信息融合中首先需要實現的關鍵技術。本課題系統集成了新近發展的多種傳感器,包括3臺Novetel GPS DL-4 OEM接收機、Riegl公司的LMS-Q140i-80激光掃描儀等,可以實時完成載體(車)的GPS定位數據、建筑物激光掃描數據等數據信息的采集及精確的空間和時間上的配準,從而實現有效的多傳感器信息融合。
1、 多傳感器空間配準
對于車載近景三維測量系統,每個傳感器得到的信息都是部分城市三維空間信息在該傳感器空間(坐標系)中的描述。由于各傳感器物理特性和空間位置上的差異,造成這些信息的描述空間(坐標系)各不相同,因此,很難對這樣的信息進行融合處理。為了保證城市三維信息融合處理的順利進行,必須在融合前對這些信息進行適當的處理,將這些傳感器的數據信息映射到一個共同的參考描述空間(參考坐標系)中,然后,進行融合處理,最后,得到城市三維信息在該空間(參考坐標系)上的一致描述。這就需要空間配準,也就是得到多傳感器局部坐標系和全局參考坐標系間的轉換關系,在本課題里選擇的全局參考坐標系就是西安80坐標系。從數學的角度來看,不同的傳感器的測量值組成一個測量子空間,而信息融合則是各測量子空間按照一定的法則向融合信息空間投影,這里的測量子空間就是在各個傳感器的局部坐標系下。
為了進行空間配準,從而實現該課題中激光掃描儀(LMS)數據與GPS數據的有效融合,本文引人了激光掃描儀坐標系統、激光掃描儀直角坐標系統、平臺坐標系統和基準參考坐標系統(西安80坐標系)。
1.1 各坐標系統定義
1) 激光掃描儀極坐標系統
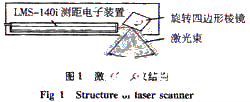
Riegl公司的LMS-Q140i-80激光掃描儀的掃描角度范圍為±40°,圖1給出了該掃描儀的掃描示意圖,建立一個激光掃描儀的局部極坐標系統(ρ,θ),極軸為圓柱體軸線方向,極角θ為掃描儀掃描方向與極軸之間的夾角。
2) 激光掃描儀直角坐標系統
激光掃描儀直角坐標系統(XL,YL,ZL)的原點OL與激光掃描儀極坐標系統的原點重合,ZL與極軸平行,方向向上,YL方向為車行方向,XL-OL-ZL平面與極平面重合,3軸構成右手坐標系。
3) 平臺坐標系統
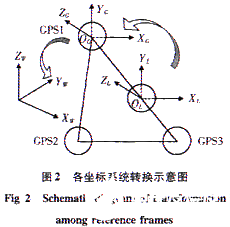
引入平臺坐標系統的目的是將3個GPS天線位置數據轉換為平臺的姿態。如圖2,平臺坐標系統原點OG位于GPS1天線相位中心,XG軸為GPS2和GPS3相位中心連線的方向,且位于GPS1,GPS2和GPS3天線相位中心連線構成的平面內,YG軸也位于該平面內,ZG軸垂直于此平面向上,構成右手坐標系。
4) 基準參考系統(西安80坐標系)
X軸沿O所在的經緯度線指向東,軸沿O所在經緯度指向北,z軸指向天頂,X,Y,Z指向天頂。
1.2 各坐標系統間轉換
1) 掃描儀極坐標系統向掃描儀直角坐標系統轉換
掃描儀極坐標系統的極點與掃描儀坐標系統的原點重合,極軸與ZL軸重合,但方向相反,極平面與XL-OL-ZK平面重合,兩坐標系統轉換關系可表示為
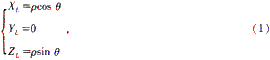
式中ρ,θ為掃描點在掃描儀極坐標系統下坐標值;XL,YL,ZL為掃描點在掃描儀坐標系統下坐標值。
2) 掃描儀坐標系統向平臺坐標系統轉換
掃描儀坐標系統OL-XLYLZL向平臺坐標系統OG-XGYGZG轉換可用一般的2個空間直角坐標系轉換公式表達
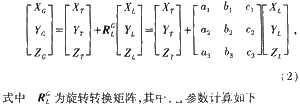

XT,YT,ZT,φ,ω和k為兩坐標系統間的6個轉換參數,轉換參數可通過外業測量加以標定。
3) 平臺坐標系統到西安80坐標系的轉換
平臺坐標系中的坐標可通過3次坐標軸旋轉和平移轉換到WGS-84坐標系中。其中,3個旋轉角和平移向量可由3臺GPS在WGS-84中的定位坐標得到,可以求出方向余弦陣RWG(方法與式(3)同),然后,采用參數化方法將WGS-84坐標系轉換到西安80坐標系,即
2 、多傳感器時間配準
選購的奧地利RIEGL公司的LMS-Q140i-80型激光掃描儀,這是一種二維激光掃描儀,進行“鉛垂面”掃描,掃描角度為±40°內,最大掃描速度為40線,也就是說每隔25 ms會獲取一條掃描線的距離信息,輸出的每條掃描線的信息中包括時間信息。
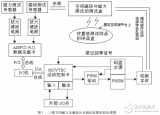
本系統選用NovAtel DL-4-L1/L2型GPS接收機,原始數據輸出頻率和位置輸出頻率為20 Hz,也就是為隔50 ms獲取一次定位數據信息,具有時間打標功能。為了使激光掃描儀數據和GPS數據在時間上配準起來,在啟動激光掃描儀的同時對GPS數據進行時間打標,在后期處理中就可以解算出GPS時間打標信息用于兩傳感器的時間配準。圖3是本文研究多傳感器時間配準的結構圖。
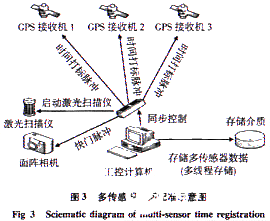
所謂時間配準,一方面通過硬件手段使得各傳感器數據在開始的時間上對齊,如上所述;另一方面,就是對各傳感器所采集的采樣頻率不同的目標觀測數據進行內差、外推,將大粒度的觀測時間點上的數據推算融合到小粒度的觀測時間點上。在這里,時間配準的意義在將每個采樣時刻由3臺GPS獲取的平臺姿態信息和掃描儀獲取的空間信息融合起來。
在本研究中,GPS數據輸出頻率為△t1=50 ms,激光掃描儀數據輸出頻率為△t2=25ms,這樣,就需要對GPS數據進行線性內插,使得設該車載三維測量系統的數據輸出間隔為△t=△t2,則對第n個時刻的激光掃描儀坐標轉換到WGS-84坐標系
3、 實驗結果
該實驗在山東科技大學北門進行,載體速度適當,路面比較平坦。首先,利用全站儀精確量測標志點(AA6和AA7)的坐標,結果見表1。然后,再利用該車載三維測量系統對相同的標志點進行了測量,得到相應的測量結果和與標準值(全站儀獲取坐標)之間的誤差值,見表2。建筑物立面上特征點如圖4所示。
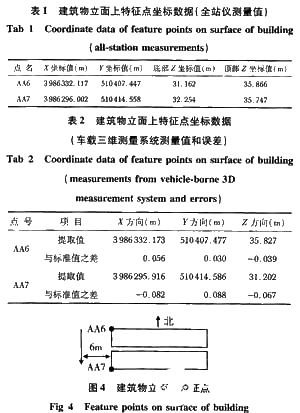
4、 結論
從上面的實驗結果(表2)可以看出:AA6點X,Y和Z方向的誤差絕對值分別為0.056,0.030,0.039 m,AA7點X,Y和Z方向的誤差絕對值比較大,分別為0.082,0.088,0.067m,但精度也在厘米級別,表明該車載三維測量系統定位精度比較高,證實了該系統多傳感器的空間配準和時間配準方案是切實可行的,滿足了該系統精度的要求。
責任編輯:gt
-
傳感器
+關注
關注
2550文章
51046瀏覽量
753120 -
激光
+關注
關注
19文章
3188瀏覽量
64451 -
gps
+關注
關注
22文章
2895瀏覽量
166190
發布評論請先 登錄
相關推薦

labview 利用三維空間畫了一個球,然后想在球面上畫幾個點
請問ADXL345配合陀螺儀能精確測量短時三維空間運動路徑嗎?
基于麥克風陣列模擬人耳進行三維空間的聲源定位
三維空間中每一平面有四個點,能根據這四個點畫出一個圓來嗎 ?
基于交流伺服控制的三維空間磁場與磁力測試技術
基于伺服控制的三維空間磁場與磁力測試系統
多電平逆變器三維空間矢量調制
非正交三維坐標系下多電平空間矢量調制策略





 工商網監
工商網監
評論