

1、引言
現(xiàn)代海戰(zhàn)中,飛機(jī)或?qū)椀牡涂铡⒊涂胀灰u,尤其是具有“低、小、快”戰(zhàn)術(shù)特性的掠海導(dǎo)彈,對水面艦艇的安全構(gòu)成極大的威脅。因受到地球曲率、多路徑效應(yīng)、背景雜波的影響,以及隱身技術(shù)的廣泛采用,雷達(dá)在較遠(yuǎn)的距離,發(fā)現(xiàn)和穩(wěn)定跟蹤掠海導(dǎo)彈較困難,即使在近距離上發(fā)現(xiàn)和跟蹤這樣的高速目標(biāo),防御武器系統(tǒng)也很難有充足的反應(yīng)時(shí)間。因此,水面艦艇探測系統(tǒng)必須解決好對低空掠海導(dǎo)彈的發(fā)現(xiàn)及穩(wěn)定跟蹤問題,保證艦載武器和系統(tǒng)能有效地?cái)r截低空、超低空目標(biāo)。
艦炮系統(tǒng)中一般配有火控雷達(dá)和光電系統(tǒng)等探測設(shè)備,這些傳感器一般只起互補(bǔ)的作用,一種傳感器由于被干擾或故障不能作用時(shí),改用另一種傳感器。在多傳感器的使用上,僅僅做了優(yōu)化選擇,各種傳感器的信息沒有進(jìn)行真正意義上的融合。若能充分利用這兩種傳感器的各自優(yōu)點(diǎn),采用多傳感器數(shù)據(jù)融合技術(shù)、復(fù)合跟蹤技術(shù),可極大的提高艦炮系統(tǒng)對低空目標(biāo)的發(fā)現(xiàn)和跟蹤性能。
2、 海面低空目標(biāo)多路徑效應(yīng)
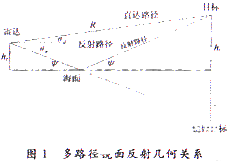
2.1 多路徑幾何模型
雷達(dá)在探測低空掠海飛行的目標(biāo)時(shí),天線具有一定的仰角。雷達(dá)波束照射目標(biāo)的同時(shí)必然會照射一定區(qū)域的海面,回波信號有可能直接或經(jīng)過海面反射后到達(dá)雷達(dá)接收天線。直達(dá)波和反射波相互干涉,引起仰角誤差信號在幅度和相位上發(fā)生變化,引起的誤差為多路徑誤差。
海面多路徑反射分為兩部分:鏡面反射和漫反射。
(1) 鏡面反射:鏡面反射波與直達(dá)波是相關(guān)的,他滿足瑞利判據(jù),即:
![]()
其中:△h是反射面高度的變化,Ψ是擦低角,λ是波長。如圖1所示。
(2) 漫反射:在海面除了鏡面反射,還有漫反射,他隨海水的運(yùn)動起伏,漫反射波與直達(dá)波是不相關(guān)的,是由海面前向散射分量形成,多普勒頻移與直達(dá)波基本相同。
2.2 多路徑效應(yīng)對角跟蹤系統(tǒng)的影響
多路徑效應(yīng)對雷達(dá)低空目標(biāo)跟蹤的主要影響表現(xiàn)在俯仰角上,根據(jù)反射信號(或鏡像目標(biāo))進(jìn)入的雷達(dá)波束區(qū)域,分為3種誤差區(qū)域:
2.2.1 副瓣反射區(qū)
在副瓣反射區(qū)內(nèi),誤差主要是由鏡面反射引起的,主波束不照射到反射表面,反射信號指通過天線波束的副瓣進(jìn)入雷達(dá)接收機(jī),多路徑誤差是周期性的,其均方根誤差為:
![]()
其中,θB是天線仰角波瓣寬度,Gsc是波瓣主瓣的峰值功率與鏡像信號所在角度上的差波瓣旁瓣的峰值功率之比。
2.2.2 主瓣反射區(qū)
當(dāng)目標(biāo)仰角低到跟蹤雷達(dá)的主瓣一側(cè)照射表面時(shí),反射信號將進(jìn)入主瓣。跟蹤誤差為:
![]()
其中,△t∑t是直射波方向的差信號與和信號,△r∑t是反射波方向的差信號與和信號,ρ是表面反射系數(shù),a是反射信號相對直射信號的總相移。
2.2.3 水平反射區(qū)
目標(biāo)信號與反射信號在俯仰方向上非常接近,同時(shí)進(jìn)入天線主瓣,接受信號功率衰落很大,此時(shí),多路徑誤差為兩個(gè)反射體目標(biāo)的閃爍誤差。跟蹤誤差為:
![]()
其中,e是相對于目標(biāo)的距離誤差,ρ是表面反射系數(shù),φr為直射路徑與反射路徑的路程差。
以單脈沖雷達(dá)為例仿真,假設(shè)目標(biāo)高度為10 m,天線高度為15 m,反射系數(shù)ρ=0.8,勻速直線向雷達(dá)方向飛行,多路徑效應(yīng)隨距離變化,引起的俯仰角誤差如圖2所示。
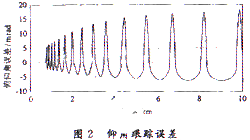
從圖2可以看出,雷達(dá)跟蹤低空掠海目標(biāo)時(shí),多路徑效應(yīng)將嚴(yán)重目標(biāo)俯仰角的測量,這種誤差可分為兩種:一種是高信噪比階段時(shí)近似恒定的偏差,另一種是低信噪比階段時(shí)的尖峰誤差。尖峰誤差出現(xiàn)在直達(dá)波和反射波的相位差約180°時(shí),直達(dá)波和反射波相互抵消,此時(shí)信噪比最低,對應(yīng)著尖峰誤差的峰值。由于信噪比非常低,俯仰角誤差幾乎為零,雷達(dá)非常容易丟失目標(biāo)。
2.3 多路徑效應(yīng)的抑制方法
目前,抑制雷達(dá)低角跟蹤時(shí)多路徑效應(yīng)的方法,基本思想都是圍繞著設(shè)法補(bǔ)償因多路徑效應(yīng)造成的信號衰落,去掉直射信號與反射信號的相關(guān)性,去除反射信號的干擾,以滿足對低空目標(biāo)精確跟蹤要求。
2.3.1 經(jīng)典多路徑抑制技術(shù)
經(jīng)典多路徑效應(yīng)抑制方法主要包括:毫米波技術(shù)、頻率分集和捷變技術(shù)、不對稱波瓣技術(shù)、雙零跟蹤、復(fù)角跟蹤技術(shù)、偏軸跟蹤技術(shù)等。
為解決低空目標(biāo)跟蹤問題,各國都相繼研制了多種低角跟蹤雷達(dá),主要包括:
(1) 美國“密集陣”近程反導(dǎo)系統(tǒng),其雷達(dá)采用“重濾波”技術(shù),解決低空多路徑效應(yīng)問題。
(2) 荷蘭“守門員”近程反導(dǎo)系統(tǒng),其雷達(dá)采用X/Ka雙波段技術(shù),X波段用于快速捕捉目標(biāo),Ka波段波束寬度0.6°,用于低空目標(biāo)的穩(wěn)定精確跟蹤。
(3) 俄羅斯“喀什坦”彈炮合一防空系統(tǒng),其雷達(dá)采用毫米波技術(shù),解決低空多路徑效應(yīng)問題。
2.3.2 陣列信號處理多路徑抑制技術(shù)
采用陣列信號處理技術(shù)解決多路徑效應(yīng)問題,這方面技術(shù)發(fā)展非常迅速。
超分辨率技術(shù)主要包括最大似然譜估計(jì)、自回歸模型、特征結(jié)構(gòu)法譜估計(jì)、最小二乘法譜估計(jì)等。均突破傳統(tǒng)Fourier譜分析的瑞利極限,具有比Fourier譜分析更高的分辨率,能夠分辨角間隔小于一個(gè)波束寬度的多個(gè)信號。
基于特征結(jié)構(gòu)的MUSIC算法目前研究較多,這種算法無法應(yīng)用于相干信號源,必須去掉信號源的相干性,雷達(dá)低角跟蹤時(shí)多路徑效應(yīng)的相干性非常強(qiáng)、起伏慢,將MUSIC算法應(yīng)用于低角跟蹤,還需要做進(jìn)一步的研究工作。
最大似然估計(jì)可應(yīng)用于低角跟蹤,但由于運(yùn)算量較大,因此,如何得到快速、穩(wěn)定、準(zhǔn)確的結(jié)果,仍然需要進(jìn)一步的研究。
2.3.3 多傳感器融合技術(shù)應(yīng)用于低角跟蹤
多傳感器數(shù)據(jù)融合是對多源信息處理的方法,是將獲得的多傳感器數(shù)據(jù)信息通過檢測、關(guān)聯(lián)、跟蹤、估計(jì)、綜合等多級多功能處理,得到目標(biāo)一致性描述,從而以更高的精度、較高的概率和置信度,得到所需的目標(biāo)狀態(tài)和身份估計(jì),以及完整、及時(shí)的態(tài)勢和威脅評估等決策信息。
與傳統(tǒng)的單傳感器信息處理相比,多傳感器數(shù)據(jù)融合在解決目標(biāo)檢測、跟蹤和識別有如下優(yōu)勢:
(1) 擴(kuò)展了空間覆蓋范圍和時(shí)間覆蓋范圍。
(2) 增加了測量空間的維數(shù)。
(3) 降低了目標(biāo)的模糊度。
(4) 提高了信號的空間分辨率。
(5) 提高了系統(tǒng)的可靠性和可信度。
(6) 使系統(tǒng)具有良好的魯棒性。
對于單個(gè)跟蹤傳感器,其獲得目標(biāo)跟蹤信息可能不全,跟蹤精度是不夠的。若采用多個(gè)互補(bǔ)的跟蹤傳感器,信息就有冗余性。通過多傳感器的數(shù)據(jù)融合可以充分利用多傳感器的資源,改善探測性能。
在對海低角跟蹤時(shí),火控雷達(dá)探測距離遠(yuǎn),捕獲目標(biāo)容易,但對低空目標(biāo)低角跟蹤時(shí),存在嚴(yán)重的多路徑效應(yīng)影響,容易丟失目標(biāo)。光電系統(tǒng)不存在多路徑效應(yīng)影響,角跟蹤精度高,但視場較小,捕獲目標(biāo)困難,跟蹤距離較近。將雷達(dá)與光電系統(tǒng)實(shí)現(xiàn)真正的數(shù)據(jù)融合,充分利用這兩種傳感器的各自優(yōu)點(diǎn),采用多傳感器數(shù)據(jù)融合技術(shù),復(fù)合跟蹤技術(shù),可極大地提高艦炮系統(tǒng)對低空目標(biāo)的發(fā)現(xiàn)和跟蹤性能。
3 、雷達(dá)、光電數(shù)據(jù)融合技術(shù)解決多路徑效應(yīng)
3.1 雷達(dá)、光電系統(tǒng)數(shù)據(jù)融合跟蹤
在艦炮武器系統(tǒng)中,雷達(dá)與光電系統(tǒng)各自獨(dú)立對低空目標(biāo)進(jìn)行跟蹤,提供獨(dú)立的目標(biāo)距離、方位、俯仰角等目標(biāo)信息,由于雷達(dá)與光電系統(tǒng)各自的重復(fù)頻率不一致,組網(wǎng)后要求對雷達(dá)、光電系統(tǒng)時(shí)間和空間進(jìn)行配準(zhǔn)處理,否則,未經(jīng)處理的不同步的傳感器數(shù)據(jù)融合,可能導(dǎo)致性能不如單獨(dú)使用一個(gè)傳感器。
雷達(dá)與光電系統(tǒng)對低空目標(biāo)進(jìn)行跟蹤采用各自獨(dú)立的測量方程,數(shù)據(jù)融合后,采用最佳數(shù)據(jù)壓縮處理方法進(jìn)行融合后的數(shù)據(jù)濾波,實(shí)現(xiàn)真正意義上的數(shù)據(jù)融合。
3.2 雷達(dá)、光電系統(tǒng)組網(wǎng)時(shí)間配準(zhǔn)
雷達(dá)與光電系統(tǒng)組網(wǎng)的時(shí)間配準(zhǔn),采用最小二乘規(guī)則配準(zhǔn)法。跟蹤雷達(dá)的重復(fù)頻率比光電系統(tǒng)的要高,光電系統(tǒng)一個(gè)周期對應(yīng)跟蹤雷達(dá)n個(gè)周期,將n個(gè)周期跟蹤雷達(dá)測量值融合成一個(gè)虛擬的測量值,再與光電系統(tǒng)的測量值進(jìn)行融合,消除多傳感器不同步造成的對數(shù)據(jù)融合的影響。
3.3 雷達(dá)、光電系統(tǒng)組網(wǎng)空間配準(zhǔn)
雷達(dá)與光電系統(tǒng)的空間配準(zhǔn)誤差主要有:
(1) 傳感器之間的方位和距離上的組合失配。
(2) 傳感器位置誤差。
(3) 坐標(biāo)變換的精度誤差。
雷達(dá)與光電系統(tǒng)組網(wǎng)的空間配準(zhǔn),采用最小二乘規(guī)則配準(zhǔn)法。適合于同一平面內(nèi),距離較近的多傳感器空間配準(zhǔn)。
3.4 雷達(dá)、光電系統(tǒng)數(shù)據(jù)可信度水平
雷達(dá)和光電系統(tǒng)在對海面低空目標(biāo)進(jìn)行跟蹤時(shí),數(shù)據(jù)的可信度是不一樣的,由于多路徑效應(yīng)只影響雷達(dá)跟蹤,光電系統(tǒng)的跟蹤數(shù)據(jù)可信度要高于雷達(dá)的跟蹤數(shù)據(jù)可信度。
多路徑效應(yīng)對雷達(dá)影響是周期性的,雷達(dá)的跟蹤數(shù)據(jù)可信度是非常重要的,必須剔除多路徑效應(yīng)影響大的數(shù)據(jù),否則雷達(dá)和光電系統(tǒng)數(shù)據(jù)融合的跟蹤精度和性能可能不如單個(gè)傳感器的跟蹤精度和性能。
3.5 雷達(dá)、光電系統(tǒng)組網(wǎng)濾波方式
采用雷達(dá)、光電系統(tǒng)組網(wǎng)對掠海目標(biāo)進(jìn)行跟蹤,要求雷達(dá)和光電系統(tǒng)同時(shí)對目標(biāo)進(jìn)行跟蹤濾波,雷達(dá)和光電系統(tǒng)的跟蹤誤差是已知的,而且各自的跟蹤濾波在統(tǒng)計(jì)上是相互獨(dú)立的。
對于雷達(dá)和光電系統(tǒng)組網(wǎng)后的系統(tǒng)濾波,采用最優(yōu)數(shù)據(jù)壓縮處理方法。
雷達(dá)測量值(R,α,β),光電系統(tǒng)測量值(Rt,αt,βt),經(jīng)過最優(yōu)數(shù)據(jù)壓縮后,俯仰角測量誤差方差為:
![]()
以單脈沖雷達(dá)為例仿真,假設(shè)目標(biāo)高度10 m,天線高度15 m,反射系數(shù)ρ=0.8,勻速直線向雷達(dá)方向飛行,如圖3所示。
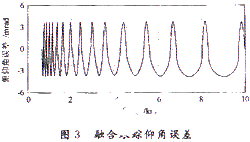
通過圖2和圖3的比較可以看出,剔除掉可信度低的某些雷達(dá)大誤差數(shù)據(jù),采用雷達(dá)、光電系統(tǒng)數(shù)據(jù)融合技術(shù)復(fù)合跟蹤,可明顯改善對海低角跟蹤的精度和性能,也充分說明了多傳感器融合技術(shù)是解決對海低角跟蹤的又一條行之有效的途徑。
4 、結(jié) 語
未來的海戰(zhàn)將是廣泛使用各種高技術(shù)武器裝備在水下、海上、陸上、太空和電磁空間進(jìn)行對抗的一體化網(wǎng)絡(luò)戰(zhàn)。水面艦艇對飛機(jī)或?qū)椀牡涂铡⒊涂胀灰u的防范,不僅僅依賴于艦炮武器系統(tǒng)中所包含的雷達(dá)或光電系統(tǒng)等少量傳感器,而是建立在C4KISR系統(tǒng)下,能充分利用艦艇、空中、太空等各種傳感器,經(jīng)過不同層次的數(shù)據(jù)融合,這樣才能過實(shí)現(xiàn)在遠(yuǎn)距離對掠海低空小目標(biāo),早期預(yù)警、跟蹤,使得艦載防御武器系統(tǒng)有充足的反應(yīng)時(shí)間進(jìn)行攔截。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2564文章
52624瀏覽量
763941 -
天線
+關(guān)注
關(guān)注
70文章
3267瀏覽量
141995 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3083瀏覽量
119453
發(fā)布評論請先 登錄
光電系統(tǒng)中的視頻處理技術(shù)
雷達(dá)回波系統(tǒng)的應(yīng)用研究
艦載無人機(jī)測控系統(tǒng)關(guān)鍵技術(shù)研究
武器數(shù)據(jù)鏈測試系統(tǒng)是什么組成的?
什么是基于PCI-9846武器數(shù)據(jù)鏈測試技術(shù)?
改進(jìn)的D-S理論在ETC系統(tǒng)中的應(yīng)用研究是什么?
Holon技術(shù)在敏捷制造系統(tǒng)中的應(yīng)用研究
VxWorks在導(dǎo)彈武器測試發(fā)射控制領(lǐng)域的可行性應(yīng)用研究
TAO在艦載指控系統(tǒng)中的應(yīng)用研究
飛機(jī)武器系統(tǒng)自動測試設(shè)備的研制
某武器系統(tǒng)模擬示教的實(shí)現(xiàn)
光通信技術(shù)在潛艇武器系統(tǒng)中的應(yīng)用
ZigBee和GPRS技術(shù)在水文監(jiān)測系統(tǒng)中的應(yīng)用研究
微波武器系統(tǒng)技術(shù)應(yīng)用及原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論