") 基于C8051F311單片機實現汽車座椅自動控制系統(tǒng)的軟硬件設計
基于C8051F311單片機實現汽車座椅自動控制系統(tǒng)的軟硬件設計
引言
隨著人們生活水平的提高,對汽車座椅的舒適性要求也越來越高,要求對汽車座椅地調節(jié)能夠更加簡單、方便、快捷。目前,汽車座椅位置的調節(jié)多采用基于手動調節(jié)方式的機械和電動控制兩種方式。汽車座椅位置的調節(jié)主要有三個方向,即高度調節(jié)、水平位置調節(jié)以及座椅靠背傾角的調節(jié)。
對于家庭使用的汽車,往往由多個成員駕駛同一輛汽車;當不同的駕駛者坐在同一個座椅時,由于個人的身體差異,所需要的汽車座椅的位置各不相同,需經常調節(jié)座椅位置;而目前的大部分汽車座椅沒有記憶功能,使同一個人在不同的時間駕駛汽車時,汽車座椅的位置可能被其他成員改變,而需重新調節(jié)座椅各個方向位置,比較繁瑣。
座椅在汽車內安裝時,由于不同汽車的內部空間不相同,座椅在各方向所能移動的位置極限也不同;汽車電動座椅在電動機牽引下移動,而目前汽車電動座椅不能自動測量安裝的極限位置,座椅很容易在到達極限位置時仍繼續(xù)運行,容易使電動機因長時間工作在堵轉狀態(tài)而燒毀。
文中提供一種具有自動測量和記憶功能的汽車電動座椅自動控制系統(tǒng)的設計方法。
1、系統(tǒng)基本工作原理
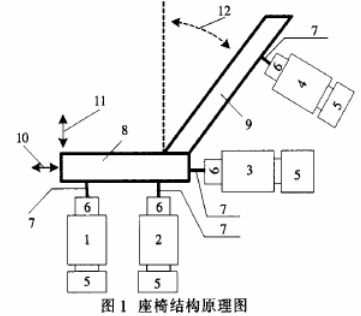
汽車自動座椅結構原理如圖1所示,座椅由4個直流電機牽引,其中高度調節(jié)電機2個,水平調節(jié)和靠背調節(jié)電機各1個;直流電動機電樞電壓為12V,電源從汽車電瓶上獲得。汽車座椅自動控制系統(tǒng)由內部帶有非易失性數據存儲器的C8051F311單片機、驅動模塊、傳動機構以及操作手柄構成。電動機的轉速和座椅的位置信息由安裝在電機上的霍爾傳感器檢測,經整形和放大后送入單片機,構成系統(tǒng)的速度反饋。
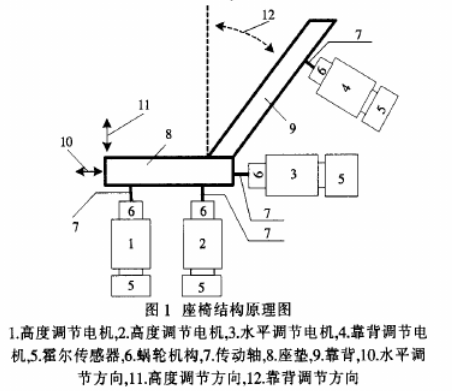
汽車電動座椅是在傳統(tǒng)的汽車座椅上安裝直流電動機、蝸輪結構、傳動軸,一起組成傳動機構,牽引座椅移動;在汽車座椅的下面垂直安裝兩個直流電動機,以支撐駕駛者在垂直方向做上下移動;在座椅的靠背方向安裝一個直流電動機,用來控制座椅靠背的角度變化;在座椅的水平方向安裝一個直流電動機,用來控制汽車座椅在水平方向前后移動。操作手柄上設有多個手動調節(jié)按鍵,通過手動調節(jié)控制直流電動機,改變傳動軸的行程和方向,從而調節(jié)汽車座椅的位置,如座椅上下位置,前后位置以及靠背的角度變化;并設有多個存儲按鍵,用來記憶或恢復座椅的位置信息。在控制系統(tǒng)上安裝有一個自學習按鍵,用來自動測量座椅在汽車內部所能移動極限位置,防止座椅在到達極限位置后使電動機長時間工作在堵轉狀態(tài)而燒毀。
2、系統(tǒng)硬件設計
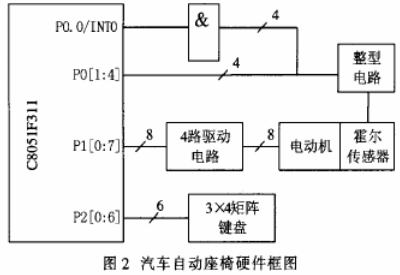
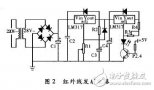
C8051F311是美國Silicon Labs 公司推出的以傳統(tǒng)8051單片機為核心的微控制器,它有25個I/O口,所有I/O口線都具有強大的控制功能,可以編程為弱上拉或推挽輸出,也可設置成漏極開路;加上上拉電阻后可以與TTL電平直接接口。單片機具有獨特的數字開關陣列,可以將單片機的內部硬件資源(如外部中斷、UART、SPI等)配置到I/O口P0、P1和P2口上。如圖2所示,單片機的外部中斷0(INT0)被配置到端口P0的P0.0。C8051F311單片機具有較大程序存儲器FLASH ROM和片內RAM,單片機16K的FLASH存儲器可用來存放程序代碼和非易失性的數據,汽車電動座椅各直流電動機的位置信息以及記憶的位置信息等數據,都作為非易失性數據存儲在FLASH ROM內。
自動座椅系統(tǒng)的硬件設計如圖2所示: 34的矩陣鍵盤作為系統(tǒng)的操作手柄;P1口連接驅動電路,用來控制4個直流電動機,整型電路將霍爾傳感器信號放大、整型成與單片機直接接口的TTL電平信號。
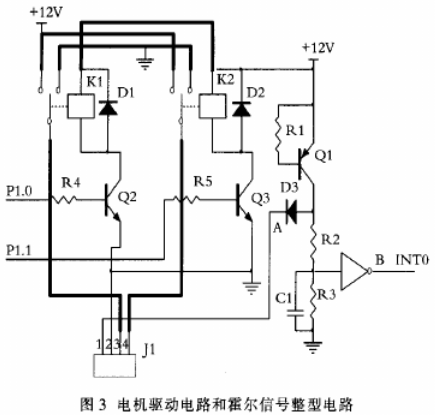
通過控制C8051F311單片機的P1.0和P1.1電平變化來控制電動機的轉向。P1.0為高電平,P1.1為低電平時,晶體管Q2開通,繼電器K1吸合;晶體管Q3斷開,繼電器K2閉合,直流電源經繼電器K1常開觸點和K2的常閉觸點與電動機電樞相聯,假設此時電動機正轉。當P1.0為低電平,P1.1為高電平時,電動機反轉。通過控制C8051F311單片機的P1口電平的變化來控制電動機轉動的方向及轉動時間,從而控制汽車座椅各方向移動。
霍爾傳感器的整型電路,將反饋的霍爾傳感器+2V左右弱信號,經放大、整型成能與單片機接口的TTL電平,連接至C8051F311單片機外部中斷0(P0.0),用中斷方式對霍爾傳感器產生的脈沖數進行計算,從而計算電動機的轉速和位置數據。
3、軟件設計
安裝在汽車座椅上的直流電動機的電源取至汽車電瓶,由于汽車電瓶的電壓會隨汽車運行狀態(tài)不同而產生波動,電動機的轉速也會隨之變化,通過電動機的轉速來計算汽車座椅所移動的距離時,汽車座椅的位置數據也會變化;因此,文中采取通過計算電動機在一個方向所轉動的圈數,即計算電動機上霍爾傳感器時所產生脈沖數,來標識電動機在此方向所行進的距離。
3.1手動調節(jié)
操作手柄上設有8個手動調節(jié)按鍵,分別用來控制座椅上各電動機在各方向的轉動,手動調節(jié)采用點動控制方式。通過操作手柄的手動按鍵,控制座椅各電動機,經傳動機構牽引座椅移動,調節(jié)座椅的移動方向和移動距離,從而調節(jié)座椅的位置。
3.2記憶功能的設計
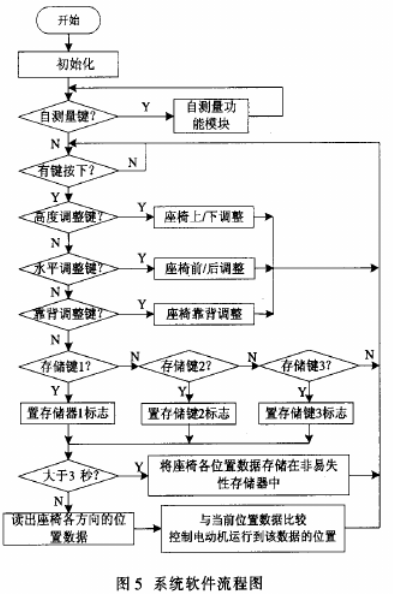
汽車座椅記憶功能的設計原理是:通過手動調節(jié)按鍵手動控制座椅各方向的電動機,使座椅到達感覺最舒適的位置,同時計算各電機上霍爾傳感器所產生的脈沖數(即座椅的位置信息),然后按下存儲按鍵時間超過3秒,系統(tǒng)將此時座椅各電動機的位置信息存入FLASH ROM的指定單元中,則完成座椅位置的記憶。當需要恢復所記憶的座椅位置時,按下相應的存儲按鍵時間不超過3秒,系統(tǒng)將記憶的座椅各電動機位置信息從FLASH ROM中讀出,并與當前的座椅位置信息比較,控制電機移動至所記憶的位置;系統(tǒng)設有多個存儲按鍵,用來記憶多個座椅位置。
3.3 測量位置極限的自學習功能
由于汽車內部空間的大小不同,汽車座椅在車內所能移動的最大距離也各不相同;汽車自動座椅安裝時應設置好極限位置,以便汽車座椅在極限位置內能安全移動;在設置座椅極限位置時,由于不同的汽車內部空間不同,使得所設置的極限位置各不同;因此必須設計一個自學習功能軟件,使系統(tǒng)能夠自動測量座椅在車內所能移動的極限位置。
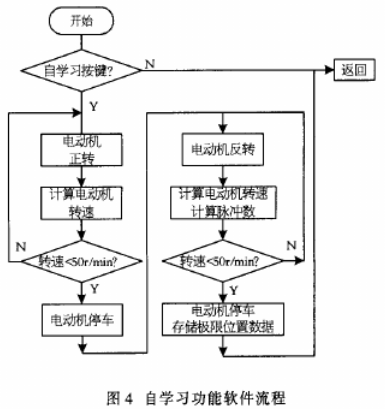
電動機運行在堵轉狀態(tài)時,轉速變低,甚至停轉;汽車座椅移動到極限位置時,由于受到汽車內部空間的限制,而使電動機堵轉。利用電動機的堵轉狀態(tài),可以測量出座椅的極限位置。
在電動機轉動過程中,監(jiān)視電動機的轉速,當轉速遠低于電動機的正常轉速時,即可判斷電動機此時處于堵轉狀態(tài),使電動機停車,此時的位置則是汽車座椅的一個極限位置;然后控制電動機往相反方向轉動,可以判斷出另一個極限位置;設一個極限位置為零點,另一個則為最大極限位置,將最大極限位置的位置數據存放于單片機內的FLASH ROM內。汽車座椅在移動達到極限位置時,控制電動機停車,且控制座椅此時只能朝相反方向轉動,以防止電動機因堵轉時間過長而燒毀。
4、結語
本文作者創(chuàng)新點:研制一種以C8051F311單片機為核心的座椅自動控制系統(tǒng),系統(tǒng)具有自動測量座椅安裝的位置極限,記憶多個座椅位置等功能,使電動座椅的安裝變得更加簡便,座椅的位置調節(jié)方便、快捷;可以大大提高座椅的可控性,提高乘坐者的舒適感,即使在行駛中的汽車也可輕松地調整的汽車座椅位置,減少駕駛者的疲勞感。座椅自動控制系統(tǒng)也可以在醫(yī)院病床上得到很好的應用,它可以幫助行動較困難的病人輕松地坐立,甚至站立起來。座椅自動控制系統(tǒng)也可以做為CAN_BUS總線上的一個節(jié)點并入汽車的控制系統(tǒng)中。
責任編輯:gt
-
單片機
+關注
關注
6035文章
44554瀏覽量
634694 -
控制系統(tǒng)
+關注
關注
41文章
6605瀏覽量
110578 -
電機
+關注
關注
142文章
9001瀏覽量
145343
發(fā)布評論請先 登錄
相關推薦
基于單片機的汽車座椅座動力測量機控制系統(tǒng)
怎樣去設計一種基于C8051F311單片機的汽車電動座椅自動控制系統(tǒng)?
用于控制汽車座椅加熱器的智能電源開關參考設計
汽車電動座椅自動控制系統(tǒng)的研制
基于單片機的圖書館燈光自動控制系統(tǒng)
C8051F005單片機的比例電磁鐵控制技術

新型溫濕度自動控制系統(tǒng)的設計與應用?
基于C8051F120的洗井自動控制系統(tǒng)
基于C8051F311單片機和霍爾傳感器實現汽車電動座椅控制系統(tǒng)的設計
51單片機 仿真 基于單片機的溫室大棚自動控制系統(tǒng)






 工商網監(jiān)
工商網監(jiān)
評論