") 多模型自適應(yīng)控制器的組成結(jié)構(gòu)、系統(tǒng)設(shè)計(jì)與仿真研究
多模型自適應(yīng)控制器的組成結(jié)構(gòu)、系統(tǒng)設(shè)計(jì)與仿真研究
矢量控制理論流傳動(dòng)的發(fā)展獲得了質(zhì)的飛躍,得到了與直流傳動(dòng)系統(tǒng)同樣優(yōu)良的靜、動(dòng)態(tài)性能。但是,矢量控制理論對(duì)電機(jī)參數(shù)的依賴性很大,而電機(jī)參數(shù)則具有一定的時(shí)變性。電機(jī)電阻存在的不確定性較大,達(dá)到標(biāo)稱值的150%;同時(shí),電機(jī)電感的不確定性變化較快。矢量控制對(duì)參數(shù)變化的敏感性使得實(shí)際系統(tǒng)難以保證完全解耦,實(shí)際控制效果難以達(dá)到理論分析的結(jié)果。
本文依據(jù)多模型自適應(yīng)控制理論,根據(jù)被控對(duì)象存在的參數(shù)的不確定性,對(duì)被控對(duì)象電機(jī)系統(tǒng)建立了多個(gè)模型,并相應(yīng)地設(shè)計(jì)了多個(gè)控制器,基于設(shè)定切換原則和與實(shí)際電機(jī)系統(tǒng)最為匹配的模型,這些控制器對(duì)被控對(duì)象電機(jī)系統(tǒng)實(shí)現(xiàn)了最佳調(diào)節(jié)。這樣就解決了常規(guī)自適應(yīng)控制所無(wú)法解決的電機(jī)電阻存在的較大不確定性及電機(jī)電感的不確定性變化較快等難點(diǎn)問(wèn)題。
多模型自適應(yīng)控制概述
多模型自適應(yīng)控制(Multiple Model Adaptive Control)于20世紀(jì)70年代研制成功,并在90年代再度成為自適應(yīng)控制的一個(gè)研究熱點(diǎn),這一研究實(shí)際上是對(duì)傳統(tǒng)的自適應(yīng)控制方法的一種推廣。
1.1 多模型自適應(yīng)控制系統(tǒng)的組成
多模型自適應(yīng)控制器主要由模型集、控制器集、切換原則三部分組成。
1.2 模型集的建立
多模型自適應(yīng)控制是用多個(gè)模型逼近系統(tǒng)的不確定性,并在多個(gè)模型的基礎(chǔ)上建立控制器進(jìn)行控制的,因此模型集的建立、元素模型的多少將直接影響控制的精度和性能。本文采用動(dòng)態(tài)優(yōu)化模型集法,利用自適應(yīng)模型和固定模型共同組成模型集。
1.3 多模型自適應(yīng)控制器的構(gòu)成
多模型自適應(yīng)控制器首先根據(jù)每個(gè)元素模型構(gòu)成元素模型控制器,然后根據(jù)某一性能指標(biāo)的切換函數(shù)將被控系統(tǒng)的控制器切換至使性能指標(biāo)為最小的元素模型控制器上。
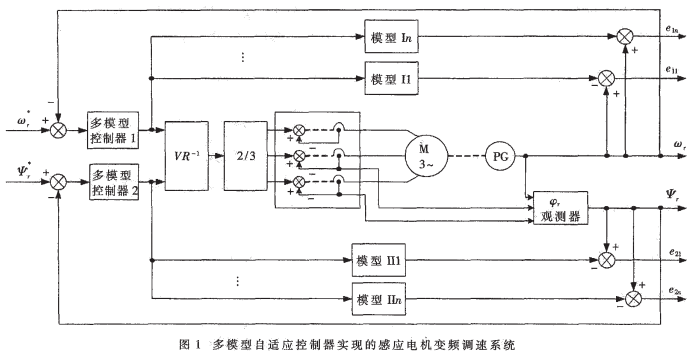
2 基于多模型自適應(yīng)控制器的感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)
2.1 變頻調(diào)速系統(tǒng)的多模型描述
在轉(zhuǎn)子磁場(chǎng)定向的同步旋轉(zhuǎn)系M_T中,根據(jù)參考文獻(xiàn)[7],對(duì)感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)描述如下:
式中:
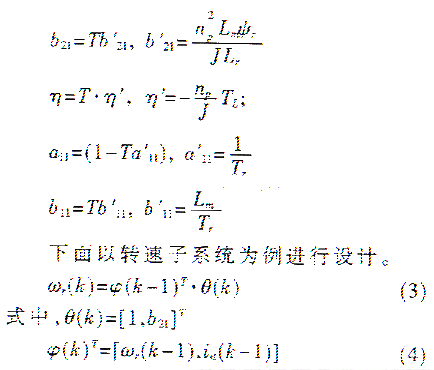
在變頻調(diào)速過(guò)程中,b12的變化區(qū)間為[b21,b21],將b21的攝動(dòng)區(qū)間功分為12個(gè)區(qū)間,即將電機(jī)參數(shù)模型集Ω分成12個(gè)模型子集Ωi(i=1,2Λ12),并且這些模型子集滿足:
對(duì)固定模型建立如下指標(biāo)切換函數(shù):

式中,α為遺忘因子,滿足0《α《1 i=1,2Λ12 在固定模型輸出參數(shù)的同時(shí),兩個(gè)自適應(yīng)模型也同步采用最小二乘法進(jìn)行參數(shù)辨識(shí),以得出電機(jī)系統(tǒng)的參數(shù):

對(duì)自適應(yīng)模型建立如下指標(biāo)切換函數(shù):

式中,L=1,2。在每個(gè)采樣周期,分別根據(jù)性能指標(biāo)(5)和(7)求取最接近電機(jī)系統(tǒng)的模型參數(shù)和辨識(shí)參數(shù):

如果L(τ)≤i(τ),則表明此時(shí)模型集中有一個(gè)自適應(yīng)模型與真實(shí)的電機(jī)模型最為匹配,選擇該模型參數(shù)作為當(dāng)前時(shí)刻的對(duì)象模型參數(shù),即θ(k)=θ“L(k);并且如果此時(shí)L=2,則對(duì)第一個(gè)自適應(yīng)模型重新設(shè)定初值,即θ1(k)=θ”2L(k)。反之,如果i(τ)≤L(τ),則表明此時(shí)模型集中的某個(gè)固定模型與真實(shí)的對(duì)象模型最為匹配,于是θ1(κ)=θi(κ),同時(shí)對(duì)第一自適應(yīng)模型重新賦初值。
2.2 多模型自適應(yīng)控制器的系統(tǒng)實(shí)現(xiàn)
基于多模型自適應(yīng)控制器實(shí)現(xiàn)的感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)如圖4所示。
2.3 仿真研究
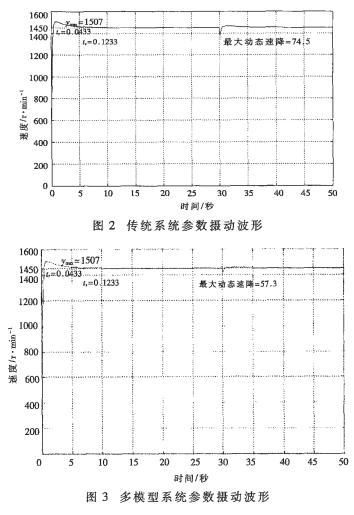
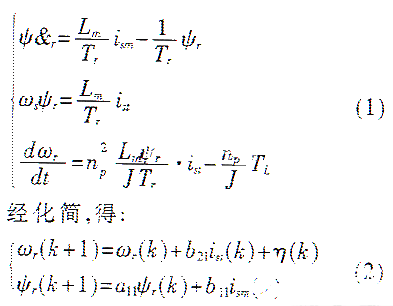
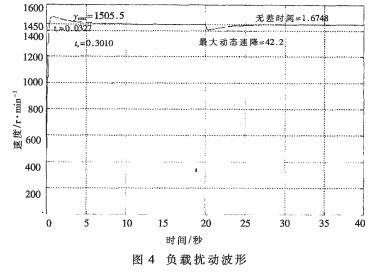
選用的電機(jī)參數(shù)如下:電機(jī)型號(hào)為JQ2-52-4,額定功率為10kW,額定電壓為380V,額定電流為19.8A,額定轉(zhuǎn)速為1450r/min,額定頻率為50Hz。Rs=1.33Ω,Lm=0.2865H,Lr=0.3005H,Rr=1.12Ω,Ls=0.2942H,J=0.0618kg%26;#183;m2。轉(zhuǎn)子電阻攝動(dòng)40%時(shí),由圖2可見(jiàn),傳統(tǒng)矢量控制系統(tǒng)的最大動(dòng)態(tài)速降為74.5r/min,相當(dāng)于4.9%;由圖3可見(jiàn),多模型控制系統(tǒng)的最大動(dòng)態(tài)速降為57.3 r/min,相當(dāng)于3.9%;由圖4可見(jiàn),額定負(fù)載擾動(dòng)時(shí),多模型控制系統(tǒng)的最大動(dòng)態(tài)速降為42.2 r/min,相當(dāng)于2.9%。
仿真結(jié)果表明,多模型控制器實(shí)現(xiàn)的變頻調(diào)速系統(tǒng)比傳統(tǒng)矢量控制系統(tǒng)具有更為優(yōu)良的動(dòng)、靜態(tài)性能。 采用自適應(yīng)模型和固定模型共同組成的具有動(dòng)態(tài)調(diào)整能力的動(dòng)態(tài)優(yōu)化模型集,模型集每個(gè)時(shí)刻都在發(fā)生變化,以此逼近“真實(shí)“電機(jī)系統(tǒng)。基于固定模型設(shè)計(jì)的控制器保證了響應(yīng)速度,而基于自適應(yīng)模型設(shè)計(jì)的控制器保證了精度。
由于多模型自適應(yīng)控制器實(shí)現(xiàn)的感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)離線地將電機(jī)參數(shù)存在的不確定性進(jìn)行了分區(qū)處理,可解決常規(guī)自適應(yīng)控制所無(wú)法解決的電機(jī)電阻存在的較大不確定性及電機(jī)電感的不確定性變化較快等難點(diǎn)問(wèn)題。針對(duì)電機(jī)參數(shù)存在的不確定性,由多模型自適應(yīng)控制器組成的感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)在不同的頻率區(qū)段采用不同的控制器。系統(tǒng)具有優(yōu)良的動(dòng)靜態(tài)性能,為實(shí)現(xiàn)高性能變頻調(diào)速系統(tǒng)提供了一條新的思路。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
112文章
16442瀏覽量
179008 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9078瀏覽量
146096 -
仿真
+關(guān)注
關(guān)注
50文章
4123瀏覽量
133861
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
[下載]交直流傳動(dòng)系統(tǒng)的自適應(yīng)控制
基于結(jié)構(gòu)自適應(yīng)的多機(jī)器人協(xié)作機(jī)制研究
基于MATLAB的時(shí)變系統(tǒng)自適應(yīng)控制的仿真
自適應(yīng)跟蹤輸出控制器的設(shè)計(jì)和仿真
高級(jí)自適應(yīng)PID控制器研究及應(yīng)用
基于多模型自適應(yīng)控制器的感應(yīng)電機(jī)變頻調(diào)速系統(tǒng)
液壓伺服系統(tǒng)自適應(yīng)模糊變結(jié)構(gòu)控制

時(shí)變非線性系統(tǒng)的自適應(yīng)逆控制仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論