") 利用Cortex-M3控制模塊實現(xiàn)自動循跡的礦井車系統(tǒng)設計
利用Cortex-M3控制模塊實現(xiàn)自動循跡的礦井車系統(tǒng)設計
隨著科技的發(fā)展、和諧社會的需求,在惡劣礦井下自動小車取代人力運作、保證礦工的人身安全成為了急需解決的問題。智能循跡小車為改善和提高礦井下運輸貨物,發(fā)揮了重要的作用。其中,系統(tǒng)硬件設計及其運行穩(wěn)定性是智能循跡小車系統(tǒng)的基本要素,而自動循跡的控制是其重要的方面。在礦井環(huán)境下,小車運行控制系統(tǒng)具有較強的非線性、模糊性和不確定性,一般路面的運載小車無法完成相應工作,用傳統(tǒng)的控制理論和方法很難對其進行有效的控制。
可見礦井惡劣環(huán)境下,智能小車自動循跡系統(tǒng)性能的設計變得非常重要。為了實現(xiàn)系統(tǒng)的穩(wěn)定性,在做了具體環(huán)境分析和需求情況下,提出了一種智能小車系統(tǒng)的設計方案,該方案采用最新的ARM內(nèi)核作控制端,紅外探測器和圖像傳感器等作為信息采集、傳輸與通訊,軟件上采用模糊控制策略實現(xiàn)。系統(tǒng)能完成在惡劣礦井環(huán)境下的自動循跡。
1 系統(tǒng)硬件設計
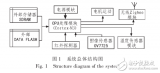
根據(jù)系統(tǒng)設計的需求,結(jié)合CPU的選型以及軟件控制算法的特點,對自動循跡小車硬件系統(tǒng)進行了整體的規(guī)劃設計。系統(tǒng)由CPU處理模塊、紅外探測器、圖像傳感器、溫度傳感器、電機驅(qū)動、無線傳輸模塊以及存儲器模塊等組成。各模塊之間的聯(lián)系如圖1所示。

圖1 系統(tǒng)總體結(jié)構(gòu)圖
1)CPU處理模塊采用ARM最新內(nèi)核Cortex-M3,與其它處理器相比,優(yōu)勢在于低功耗、低成本、高性能3者(或2者)的結(jié)合。在系統(tǒng)中其主要功能:實時采集各種傳感器的信息,根據(jù)系統(tǒng)模糊控制方法,作出系統(tǒng)的判斷、決策、相應數(shù)據(jù)的存儲或處理。
2)紅外探測器模塊是安裝在小車周圍的多組紅外收發(fā)模塊,通過即時的收發(fā)紅外信息,判斷路況。主要負責對小車路徑實時探測,并及時將信息反饋CPU進行處理。
3)圖像傳感器模塊采用高速采集、高分辨率、彩色圖像OV7725傳感器,按照CPU預先設定的采集參數(shù),負責特殊場景的圖像采集,并保存在系統(tǒng)存儲器或上傳遠程終端。
4)無線Zigbee模塊是基于2.4 G的無線通信組網(wǎng)Zigbee技術(shù),功能是將循跡小車系統(tǒng)的信息上傳遠程終端,或接收遠程終端的控制命令,完成系統(tǒng)的無線通信與整體組網(wǎng)。
5)存儲器模塊包括外部SDRAM和外擴DKTA FLASH,前者用于系統(tǒng)CPU運算數(shù)據(jù)的臨時存儲,后者用于保存采集的重要圖像數(shù)據(jù),以備遠程終端調(diào)用。
2 系統(tǒng)軟件設計
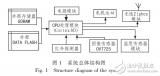
系統(tǒng)主控芯片為ARM公司的Cortex-M3控制器,負責整體系統(tǒng)的數(shù)據(jù)采集、運算控制、驅(qū)動調(diào)配與通信。軟件設計開發(fā)是基于集成開發(fā)環(huán)境Keil Uvision4完成,系統(tǒng)軟件設計的整體流程如圖2所示。
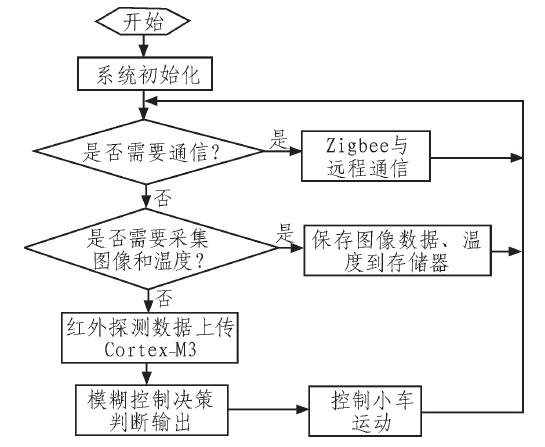
圖2 軟件設計流程圖
系統(tǒng)上電后初始化各寄存器,設置圖像傳感器OV7725采集參數(shù),Zigbee模塊通信參數(shù)以及配置紅外傳感器的探測參數(shù)。進入工作狀態(tài)后,先通過無線Zigbee模塊檢查是否需要與遠程終端通信;判斷是否需要采集當前環(huán)境的圖像或溫度數(shù)據(jù);通過分布在系統(tǒng)周圍的紅外收發(fā)模塊,探測小車運行軌跡,實時上傳數(shù)據(jù)到處理器;處理器根據(jù)紅外探測數(shù)據(jù),采取模糊控制策略,輸出下一刻電機運行的狀態(tài),從而控制小車運行的軌跡。
3 模糊控制決策輸出
系統(tǒng)軟件設計上,主控制器采集了實時探測的紅外信號,作為小車運動的方向判決,由于需要較強的實時性,因此本文提出的控制方法采用了模糊推理機制對參數(shù)進行處理,得到模糊可靠的輸出,以滿足系統(tǒng)的實時性要求。模糊控制系統(tǒng)輸入為當前運行路徑與期望運行路徑的偏差以及偏差的變化率,系統(tǒng)輸出為所計算的控制量糾正量。輸入變量為A,B(路徑偏差、偏差變化率),輸出變量為U(控制量糾正量)。控制規(guī)則表示為
Ri:ifA is Aiand B is Bi then C is Ck (1)
其中Ai,Bi,Ck分別表示語言詞集。主通道模糊控制器的輸入為E和EC,輸出為U,設定E,EC和U的論域均為:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.對應的模糊語言子集為{NB(負大)、N(負中)、NS(負小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}.通過比例因子ke和kec將偏差e和偏差變化率ec轉(zhuǎn)換為模糊學習控制器的輸入論域E和EC,通過量化因子ku將控制器的輸出轉(zhuǎn)化為實際控制量C.

根據(jù)在校正過程中要遇到的各種可能出現(xiàn)的情況和相應的調(diào)整策略得到控制規(guī)則表如表1所示。
表1 模糊規(guī)則表
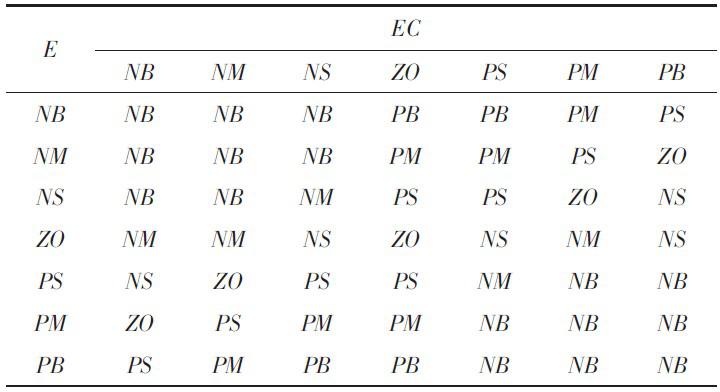
對于整個模糊控制器決策,在t時刻采樣周期內(nèi),由公式(2),根據(jù)路徑誤差和誤差變化率E,EC,由模糊判決表查出相應的U,并由量化因子ku計算得到實際控制輸出C.控制算法實現(xiàn)步驟如下:
1)計算擁塞控制系統(tǒng)的輸入狀態(tài)。
2)根據(jù)參考模型的輸出與實際對象輸出計算e,ec.
3)根據(jù)參考模型誤差和誤差變化率E,EC.
4)計算規(guī)則自校正模糊控制器的輸出U.
5)由模糊控制的量化因子計算最終的實際控制輸出C.
4 仿真研究
該系統(tǒng)設計及軟件算法研究在Matlab 7.0環(huán)境下進行軟件仿真。預先設定小車運行的期望軌跡為yd,根據(jù)模糊控制方法設計的小車實際運行軌跡為y,仿真的目的是檢驗該系統(tǒng)設計的小車,在運行過程是否能根據(jù)預設的軌跡運行。仿真的結(jié)果如圖3所示,橫軸為運行時間,縱軸為運行的距離。仿真結(jié)果顯示,小車運行初始狀態(tài),不同出發(fā)點時與期望路徑有偏差,可能達到50%以上;在運行過程中,小車運行逐漸接近預設的軌跡,其后整體的偏差小于5%.系統(tǒng)運行穩(wěn)定以后,在給定期望軌跡下,探測小車系統(tǒng)能較好的跟蹤期望軌跡。
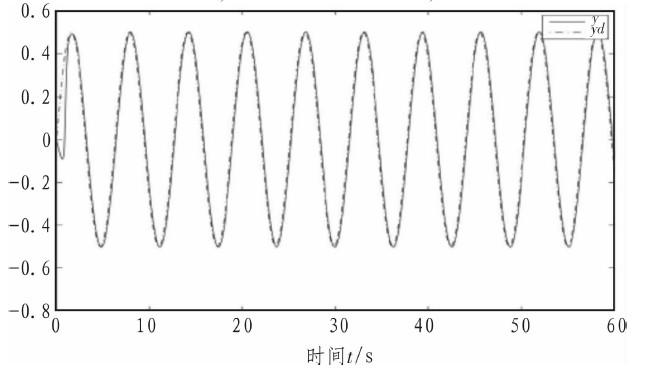
圖3 系統(tǒng)實際路徑與期望參考路徑
5 結(jié)論
該小車探測系統(tǒng)采用基于高性能Cortex-M3處理器,圖像傳感器、溫度傳感器和紅外探測器綜合設計的硬件平臺,軟件設計采用模糊控制策略的思想,提高了系統(tǒng)的可靠性和穩(wěn)定性。該測試系統(tǒng)在專業(yè)仿真軟件平臺Matlab下進行,仿真實驗結(jié)果表明,小車系統(tǒng)能較好的實現(xiàn)探測、數(shù)據(jù)采集、跟蹤軌跡等功能,達到了設計要求。
-
處理器
+關(guān)注
關(guān)注
68文章
19262瀏覽量
229664 -
溫度傳感器
+關(guān)注
關(guān)注
48文章
2940瀏覽量
156027 -
cpu
+關(guān)注
關(guān)注
68文章
10855瀏覽量
211595 -
圖像傳感器
+關(guān)注
關(guān)注
68文章
1897瀏覽量
129529
發(fā)布評論請先 登錄
相關(guān)推薦
cortex-m3的操作模式及特權(quán)級別
基于Cortex-m3的指紋識別考勤系統(tǒng)硬件設計,
求基于Cortex-M3與Android的智能家居控制系統(tǒng)解決方案
Cortex-M3 技術(shù)參考手冊
基于Cortex-M3智能無線溫度測量系統(tǒng)設計

基于Cortex-M3的礦井車循跡系統(tǒng)設計

基于ARM Cortex-M3的運動控制系統(tǒng)與算法設計
Cortex-M3處理器內(nèi)核與基于Cortex-M3的MCU關(guān)系

ARM Cortex-M3系統(tǒng)設計與實現(xiàn)
基于CORTEX-M3的多機通信網(wǎng)絡的設計與實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論