 借助CompactRIO控制器和LabVIEW進行飛蟲的飛行控制研究
借助CompactRIO控制器和LabVIEW進行飛蟲的飛行控制研究
挑戰:
開發一個靈活的高帶寬機器人設備,以便測量和仿真有翼昆蟲的飛行方式。
解決方案:
利用NI的LabVIEW軟件和CompactRIO硬件制造一個快速、模塊化、易于使用的仿生機器人平臺,它涉及各種工業協議和實時閉環激勵信號生成。
"借助于CompactRIO控制器和LabVIEW,我們對于飛蟲如何實現出色的飛行控制進行了研究。"
蒼蠅能夠高速追逐,并精確地降落在盤子的邊緣,這其中的機動性令人非常感興趣。我們可以利用蒼蠅作為模型系統研究神經信息處理、空氣動力學和遺傳學,此外,它們還可以快速、精確地使用它們的生物傳感器、控制器和執行機構。人們對它們這樣的能力很感興趣但是難以進行研究。測量和激勵裝置必須具有高帶寬、低延遲,并擁有靈活的界面。同時,易用性和模塊化特性也是跨學科和合作研究的關鍵。
我們利用CompactRIO 控制器和LabVIEW 圖形系統設計軟件來研究飛蟲如何實現出色的飛行控制。我們采用了數字I/O模塊來連接一個基于LED的視覺激勵場,它具備了時間和空間的精確的分辨率,使得我們可以有效刺激蒼蠅的視覺系統。記錄昆蟲的響應需要一個快速、靈活的采集系統。LabVIEW能夠提供記錄這些信號所需要的速度和模塊化特性,并且能夠將它們作為實時反饋來生成刺激信號。這樣,我們就能夠把將蒼蠅作為一個活的傳感器,并嵌入到一個科技系統中。
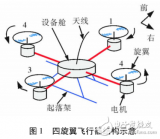
我們開發了一個試驗。在試驗中,我們把一只果蠅用繩拴住,通過果蠅的動作來控制伊普克(e-puck)機器人。該機器人是一個小型移動機器人,是一個大學的研究項目,它被設計用于通過充滿障礙的環境。從綁定在機器人上的照相機和接近傳感器可以獲得反饋,用來確定向蒼蠅展示的視覺刺激、翅振頻率和幅度等飛行參數,來控制機器人運動(圖1)。蒼蠅和機器人之間的傳遞函數會發生變化,從而實現一系列的試驗模式。
蒼蠅的高速電影:加速的LED視覺場
視覺激勵場包括8個綠色LED 面板,它們通過I2C協議連接到定制的控制器。在過去的設計中,所有的飛行都由一條總線進行控制。為了實現更高的幀率,并根據蒼蠅的反饋來調節視覺激勵,我們必須使用多條并行的總線。最終,我們選擇了NI cRIO-9014 實時控制器和一體化NI cRIO-9104可重新配置嵌入式機箱更換了最初的控制器。
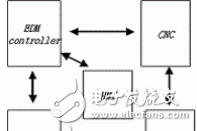
蠅控機器人實驗中的信息流示意圖
蠅控機器人:從蒼蠅到機器人
在實驗裝置(圖2)中,果蠅被用繩拴在一個環形的LED面板陣列的中心。雖然昆蟲不能夠移動,但仍可以拍打翅膀并且按照和自由飛行相同的方式飛行。數字振翅分析儀會獲得電流頻率、振幅、位置均值和蒼蠅振翅的相位。這些行為狀態矢量通過用戶數據協議(UDP)包傳輸到一臺運行LabVIEW的主機上。我們可以在主機上應用自定義傳遞函數計算出更新的伊普克(e-puck)機器人的輪轉速。這些數值再通過藍牙(Bluetooth)發送到機器人上。
UDP 是User Datagram Protocol的簡稱, 中文名是用戶數據包協議,是 OSI 參考模型中一種無連接的傳輸層協議,提供面向事務的簡單不可靠信息傳送服務。它是IETF RFC 768是UDP的正式規范。也是ISO參考模型中一種無連接的傳輸層協議,提供面向事務的簡單不可靠信息傳送服務。 UDP協議基本上是IP協議與上層協議的接口。UDP協議適用端口分別運行在同一臺設備上的多個應用程序。
從機器人到蒼蠅
當我們利用昆蟲的行為來操縱機器人時,來自機器人設備的反饋會修改面向昆蟲的視覺顯示方式。反饋由安裝在機器人頂部的三個線性照相機和八個接近傳感器給出。照相機以10Hz的頻率采集,每幀擁有102像素。接近傳感器以20Hz的頻率輸出標定后的數據。主機會通過藍牙(Bluetooth)接收這些信號并且應用第二個自定義傳遞函數,以生成在LED視覺場上顯示的下一幀圖像。
藍牙,是一種支持設備短距離通信(一般10m內)的無線電技術。能在包括移動電話、PDA、無線耳機、筆記本電腦、相關外設等眾多設備之間進行無線信息交換。利用“藍牙”技術,能夠有效地簡化移動通信終端設備之間的通信,也能夠成功地簡化設備與因特網Internet之間的通信,從而數據傳輸變得更加迅速高效,為無線通信拓寬道路。藍牙采用分散式網絡結構以及快跳頻和短包技術,支持點對點及點對多點通信,工作在全球通用的2.4GHz ISM(即工業、科學、醫學)頻段。其數據速率為1Mbps。采用時分雙工傳輸方案實現全雙工傳輸。
主機應用程序通過以太網(Ethernet)把新的圖像模式發送到實時控制器。然后這一圖像模式被劃分為8×8像素塊,每個像素塊將與一個LED面板相對應,并被轉換為I2C指令。為了實現最大處理量,這些數據會經由DMA(直接內存存取)的FIFO(先進先出)隊列傳遞到FPGA(現場可編程門陣列)。中斷向量可以保證在實時控制器命令生成和FPGA底層硬件通信之間的同步。而后,FPGA背板采用I2C協議控制12條總線,每條總線分別控制五個面板。從而,機器人所看到的環境決定了針對蒼蠅的視覺刺激,而蒼蠅對視覺刺激的響應也改變了機器人前進的路徑。
以太網(Ethernet)指的是由Xerox公司創建并由Xerox、Intel和DEC公司聯合開發的基帶局域網規范,是當今現有局域網采用的最通用的通信協議標準。以太網絡使用CSMA/CD(載波監聽多路訪問及沖突檢測)技術,并以10M/S的速率運行在多種類型的電纜上。以太網最早由Xerox(施樂)公司創建,在1980年,DEC、lntel和Xerox三家公司聯合開發成為一個標準。以太網是應用最為廣泛的局域網,包括標準的以太網(10Mbit/s)、快速以太網(100Mbit/s)和10G(10Gbit/s)以太網,采用的是CSMA/CD訪問控制法,它們都符合IEEE802.3。
視覺刺激的幀率大約在30Hz和400Hz之間,這取決于模式的深度和是否垂直對稱。控制回路中的累積延遲小于50毫秒并且這主要是由傳感器信息是經由藍牙從機器人傳輸到主機而造成的。
有效地設計:靈活的界面和模塊化的結構
借助于LabVIEW和CompactRIO,我們可以通過各種不同的協議連接到一系列的研究工具。NI和LabVIEW的網絡用戶社區提供的極大的靈活性和許多范例程序,這使得基于LabVIEW設計的應用有效地替代了實驗生物學中的定制控制器。
我們設計了一種友好的GUI(圖形用戶界面),它為實驗者提供了必要的控制手段和信息,從而簡化了多個硬件平臺上運行的代碼的復雜度(圖3)。這一功能在一些跨學科的應用中非常有效,能夠增進生物學家、數學家、物理學家和工程師之間的密切合作。
圖形用戶界面(Graphical User Interface,簡稱 GUI,又稱圖形用戶接口)是指采用圖形方式顯示的計算機操作用戶界面。與早期計算機使用的命令行界面相比,圖形界面對于用戶來說在視覺上更易于接受。它極大地方便了非專業用戶的使用人們從此不再需要死記硬背大量的命令,取而代之的是可以通過窗口、菜單、按鍵等方式來方便地進行操作。而嵌入式GUI具有下面幾個方面的基本要求:輕型、占用資源少、高性能、高可靠性、便于移植、可配置等特點。
一個混合的自適應控制器
由于蒼蠅的部分神經回路具有高度的可塑性,它可以被看作一個自適應控制器。通過使用新的仿生機器人平臺,我們能夠評估控制器在各種外部傳遞函數下的性能,這些傳遞函數幾乎能夠模仿出所有的蒼蠅的自然飛行環境。
LabVIEW 和 CompactRIO為構造這一包含活體昆蟲并且允許我們進行各種實驗的控制回路提供了理想解決方案。CompactRIO負責采集并生成各種適用不同工業標準的信號,并擴展了自定制的研究工具。另外,由于我們在計算機、實時控制器和FPGA上分別實現的應用程序是在同一個編程環境和開發語言下完成的,這大大節省了我們的學習時間,提高了效率。
-
led
+關注
關注
242文章
23321瀏覽量
661900 -
控制器
+關注
關注
112文章
16416瀏覽量
178771 -
機器人
+關注
關注
211文章
28557瀏覽量
207695 -
LabVIEW
+關注
關注
1975文章
3656瀏覽量
324610
發布評論請先 登錄
相關推薦
用LabVIEW做飛行器地面控制站
【EFM8 Universal Bee申請】基于PID控制的四旋翼飛行器仿真研究及實驗分析
飛行控制器
有刷電機無人機飛行控制器
設計飛行控制器的教程
基于586-Engine的高性能飛行控制器設計與實現
用CompactRIO和LabVIEW開發下一代機器人控制系
NI CompactRIO控制器將工作溫度范圍延伸至-40℃
國家儀器最新CompactRIO控制器將工作溫度延伸至-40
CompactRIO控制器,專用于控制和監測應用的堅固嵌入式系統
基于cRIO-9031高性能控制器的控制和監測應用
基于CompactRIO的高級可編程自動控制器

基于LabVIEW和CompactRIO開發的EDM過程控制器
基于STM32的四旋翼飛行控制器的設計與實現





 工商網監
工商網監
評論