 將神經網絡和模糊控制技術相結合實現溫室控制系統設計
將神經網絡和模糊控制技術相結合實現溫室控制系統設計
引言
溫室綜合環境控制就是對如溫度、濕度、光照強度等環境因子進行綜合調節和控制。通過合理地控制溫室中的各個執行機構,使作物和環境因子達到最佳的統一,這是溫室控制的目標。溫室系統是一個非線性、大滯后、大慣性、強耦合、時變的復雜大系統,它要受到多變的外部環境、受控對象的不確定性、作物形態、尺寸不斷變化的影響.針對模糊控制和神經網絡控制的優缺點,本文將模糊理論的知識表達與神經網絡的自學習能力有機地結合起來,采用快速的學習算法,提出了一種模糊神經網絡控制方案。
1 溫室模糊神經網絡控制器結構的確定
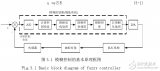
對溫室內作物影響最大的環境因子為溫度和濕度。因此,在本文設計的溫室模糊控制器中,輸入量選擇兩個,分別是溫度誤差、濕度誤差,輸出量有六個,分別是天窗、遮陽網、循環風機、側窗、燃油加熱器、微霧加濕器。圖1 為溫室智能控制基本結構圖。
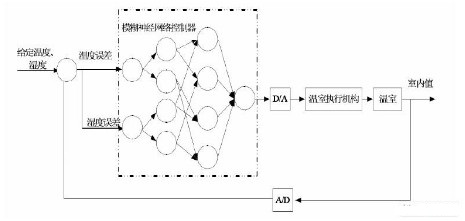
圖1 溫室智能控制基本結構圖
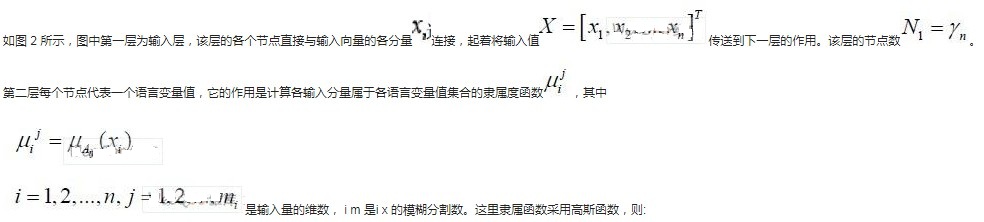
其拓撲結構如圖 2 所示:
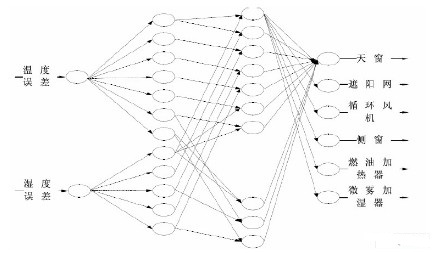
圖2 模糊神經網絡控制器拓撲結構
2.模糊推理規則的制定
將模糊神經網絡控制器的模型描述為:
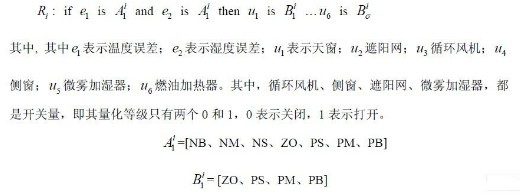
訓練初始參數設置如下,各變量的論域分別為:

式中m 為隸屬函數的中心值,σ為隸屬函數的寬度。m 和σ的初始參數值可以憑經驗給出,若沒有可靠的經驗,則初始參數值可按如下規則設定:將隸屬度函數的中心取為均勻分布在定義域內,隸屬度函數的寬度則可取為同一值,使得相鄰隸屬函數交點的隸屬度值等于0.5。對于溫度誤差 m 取值為-6、-4、-2、0、2、4、6,σ取值為1.2。濕度誤差m 取值為-4、-2、0、2、4,σ取值為1.2。天窗,燃油加熱器的m 取值為0、2、4、6,σ取值為1.2。而對于循環風機,側窗,遮陽網和微霧加濕器,其值為開關量0 和1。模糊控制器控制規則的設計原則是使系統輸出相應的動態性能與穩態性能達到最佳。即當誤差較大時,選擇控制量以盡快消除誤差為主,而誤差較小時,選擇控制量以防止超調,主要考慮系統的穩定性。
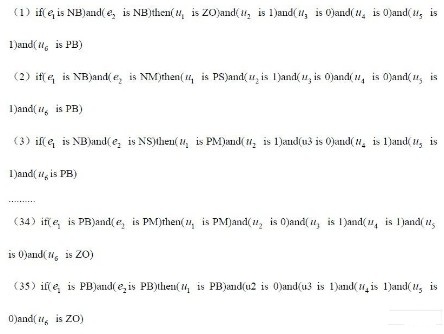
根據專家經驗,將控制過程中各種可能出現的情況及相應的控制策略進行分析匯總,可得到35 條控制規則,用“IF-THEN”形式的條件語句來加以描述,部分條件語句如下:
3.溫室模糊神經網絡控制器的學習算法

4. 模糊神經網絡控制器仿真與結果分析
根據上述設計思路,對系統進行仿真研究。其中輸入輸出訓練集的一一對應關系是基于上述模糊規則給出,模糊控制與神經網絡得以有效的結合。
圖3 為系統在MATLAB 中的仿真曲線,在經345 次訓練后,誤差可達到0.000745347,小于期望誤差的最小值0.001。仿真實驗結果表明,模糊神經網絡控制器在溫室系統中的應用具有良好的效果。溫室控制系統仿真結果如圖4 所示。
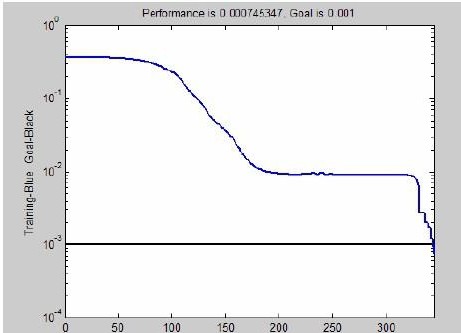
圖 3 神經網絡訓練的誤差曲線圖
圖 4 模糊神經網絡控制系統溫度仿真曲線
模糊神經網絡控制則超調量小,響應快,無振蕩,平穩性好,而且穩態誤差很小。這說明模糊神經網絡控制的動態特性和靜態特性最為優越。從能量損耗角度來講,由于模糊神經網絡的響應時間快,調節時間短,超調量小,這時對加溫的調節更接近于實際室內所需負荷的要求,這樣就可以更好的達到滿足作物生長所需的溫度及節能的效果。
5.小結
綜上所述,為了獲得滿意的控制系統性能,將神經網絡和模糊控制技術相結合,引入模糊神經網絡控制方法,系統通過網絡學習訓練使控制精度大為提高,使系統有了較強的適應性和魯棒性,獲得比較理想的控制效果,提高控制方面的優越性,也為實際控制提供了理論依據;該控制器模型的設計方法和實現技術主要是從工程應用的角度出發進行的,具有實踐性和可操作性,仿真研究及實驗結果驗證了設計的合理性與可行性,該控制器模型具有較高的應用價值。
-
控制系統
+關注
關注
41文章
6692瀏覽量
111145 -
神經網絡
+關注
關注
42文章
4789瀏覽量
101528 -
模糊控制
+關注
關注
2文章
261瀏覽量
25596
發布評論請先 登錄
相關推薦

基于神經網絡的庫存控制系統
自適應模糊神經網絡的交通燈控制系統的設計





 工商網監
工商網監
評論