") 通過PMAC實現(xiàn)三軸轉(zhuǎn)臺控制系統(tǒng)設(shè)計
通過PMAC實現(xiàn)三軸轉(zhuǎn)臺控制系統(tǒng)設(shè)計
隨著自動控制理論和數(shù)字計算機及其應(yīng)用技術(shù)的不斷發(fā)展,以計算機為基礎(chǔ)的控制技術(shù)迅猛發(fā)展,被控對象規(guī)模更大,控制過程和規(guī)律也更加復(fù)雜和精密,控制方法也更加靈活多樣[1]。在轉(zhuǎn)臺的控制系統(tǒng)中,除了用來產(chǎn)生輸入信號的仿真機之外,計算機還扮演了控制器的角色。根據(jù)控制器的不同形式,計算機控制系統(tǒng)分為集中式、分布式、集散式三種類型,其中集散式控制器又分為PC機與單片機、PC機與PC機、PC機與嵌入式控制器三種形式。轉(zhuǎn)臺運動控制系統(tǒng)是轉(zhuǎn)臺設(shè)計中最為關(guān)鍵的部分,本課題中選用PC機與嵌入式控制器的形式,其中PC機采用性能穩(wěn)定的IPC(工控機),嵌入式控制器選用美國DeltaTau公司的可編程多軸控制器PMAC,即IPC+PMAC。
1 轉(zhuǎn)臺的基本結(jié)構(gòu)與組成
由于各種民用、軍用飛行器技術(shù)的快速發(fā)展,當(dāng)今世界各國都十分重視半實物仿真技術(shù)的研究和應(yīng)用,而三軸轉(zhuǎn)臺是半實物仿真的重要設(shè)備之一[2]。通常,三軸轉(zhuǎn)臺提供模擬飛行器飛行姿態(tài)角和為被試件提供測試條件的功能,以便驗證全數(shù)字仿真的實驗結(jié)果并進一步優(yōu)化或改良飛行器設(shè)計方案。轉(zhuǎn)臺負(fù)載放在內(nèi)框之上,由平板固定,內(nèi)框、中框和外框均可繞其軸向做360°旋轉(zhuǎn)運動,可以模擬飛行器的3個自由度的橫滾、俯仰和航向運動。三軸轉(zhuǎn)臺由控制部分和機械部分組成,轉(zhuǎn)臺的控制部分由一個控制柜和一臺IPC組成,轉(zhuǎn)臺機械結(jié)構(gòu)由框架結(jié)構(gòu)、動力源、支承結(jié)構(gòu)、驅(qū)動方式、軸系結(jié)構(gòu)、配重方式等組成。本課題中的轉(zhuǎn)臺采用UOO結(jié)構(gòu),外框架采用音叉形式(U型),其結(jié)構(gòu)簡單,轉(zhuǎn)動慣量小,并可相應(yīng)縮小轉(zhuǎn)臺總體尺寸;中框架和內(nèi)框架采用封閉框形式(O型),易于實現(xiàn)整圈旋轉(zhuǎn)。轉(zhuǎn)臺的3個軸系均采用精密機械軸承支撐,直流無刷電機驅(qū)動,運用海德漢增量式編碼器進行速度、位置反饋,并在每軸運用滑環(huán)進行導(dǎo)線轉(zhuǎn)接,可使框體做無限旋轉(zhuǎn)運動。
2 PMAC控制器簡介
PMAC(Programmable Multi-Axis Controller)是美國Delta -Tau公司生產(chǎn)的系列運動控制器。使用Motorola的DSP56000系列芯片作為CPU,最多可實現(xiàn)8軸的伺服控制。具有良好的硬件開放性和軟件開放性[3]。
2.1 PMAC的硬件開放性
PMAC支持多種工作平臺,允許在PC、STD、VME、PCI等不同總線上運行,方便了用戶選擇主機類型;有模擬和數(shù)字兩種伺服接口,能與步進電機、直流伺服電機、交流伺服電機等多種電機連接,并可對不同的電機提供相應(yīng)的控制信號;可接受各種檢測元件的反饋信息,包括測速發(fā)電機、光電編碼器、光柵、旋轉(zhuǎn)變壓器等;提供串行方式、并行方式和雙端口RAM方式與PC機進行雙向通信;絕大部分地址向用戶開放,包括電機信息、坐標(biāo)信息及各種保護信息,這些硬件的開放性使用戶可以很方便地根據(jù)自己的需要進行硬件設(shè)備的搭建。
2.2 PMAC的軟件開放性
PMAC支持各種高級語言,用戶可以使用VB、VC、Delphi等在Windows軟件平臺上制定用戶專用界面;PMAC提供了包含速度和加速度前饋的PID控制和階式濾波器,電機和負(fù)載的雙編碼器,能納入用戶開發(fā)的伺服算法。PMAC具有很強的計算能力,許多數(shù)學(xué)、邏輯和超越函數(shù)的計算都能通過用戶程序中的變量和常數(shù)進行;內(nèi)含可編程邏輯控制器。PMAC的I/O點可以擴展至2 018位,所有的I/O點都由軟件來控制,只要使用一個類似高級程序中的指針變量指向某一I/O地址,就可以方便地在運動程序和PLC程序中通過該指針變量來對該I/O點進行輸入或輸出控制。同時該PLC工具有強大的邏輯功能和判斷能力,可編制復(fù)雜的邏輯關(guān)系。
3 控制系統(tǒng)的介紹
3.1 控制系統(tǒng)的原理
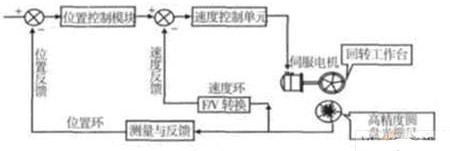
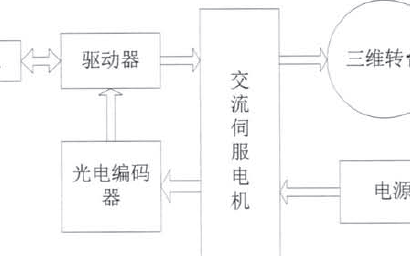
對于轉(zhuǎn)臺的方位控制,首先通過GPS等得到目標(biāo)點的方位坐標(biāo),經(jīng)過IPC機計算出目標(biāo)點的方位角度,把位置信號送入PMAC卡,通過絕對式光電碼盤形成閉環(huán),從而達到位置伺服目的,包括速度環(huán)和位置環(huán)兩部分,其控制原理如圖1所示。
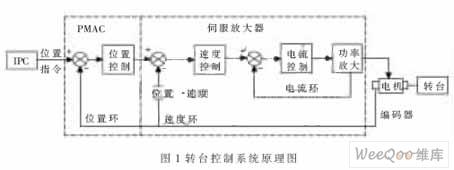
其中速度環(huán)由直流脈寬伺服系統(tǒng)、直流力矩電機以及測速電機構(gòu)成,測速電機與直流力矩電機同軸并反饋成與轉(zhuǎn)速成正比的電壓信號,至直流脈寬伺服系統(tǒng),從而形成速度閉環(huán)。
位置環(huán)由PMAC卡、直流脈寬伺服系統(tǒng)、直流力矩電機、光電碼盤構(gòu)成,光電碼盤與直流力矩電機同軸并反饋位置信號至PMAC卡,從而形成位置閉環(huán),以實現(xiàn)動態(tài)目標(biāo)跟蹤的目的,
3.2 控制系統(tǒng)的硬件組成
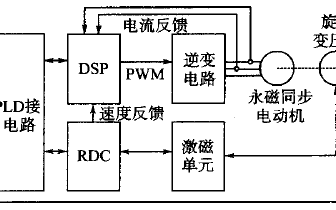
為了提高系統(tǒng)的運動可靠性和快速響應(yīng)能力,轉(zhuǎn)臺采用上下位機的兩級控制方式,其硬件組成如圖2所示。
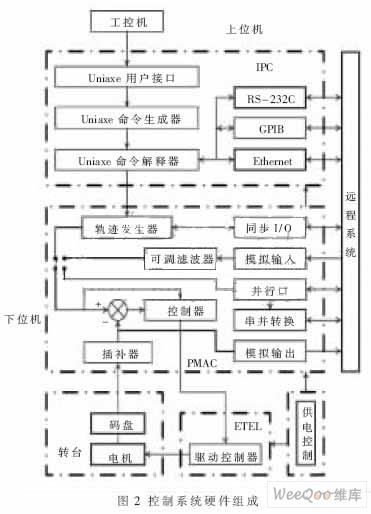
其中上位機主要根據(jù)控制規(guī)律進行計算、處理、邏輯判斷和存儲,實現(xiàn)轉(zhuǎn)臺控制的集中監(jiān)控、綜合管理,主要實現(xiàn)系統(tǒng)實時在線綜合管理、性能檢測、安全保護及監(jiān)控管理以及數(shù)據(jù)采集與處理功能。在轉(zhuǎn)臺系統(tǒng)運行過程中,上位機完成轉(zhuǎn)臺系統(tǒng)性能參數(shù)的圖形顯示、數(shù)據(jù)處理,得出系統(tǒng)工作所必需的指令和參數(shù)。由于工業(yè)控制計算機抗震性和抗干擾能力強,工作可靠性高,目前被廣泛用于現(xiàn)場數(shù)據(jù)采集處理及伺服系統(tǒng)的上位計算機。本系統(tǒng)采用研華工控機作為上位機,集中控制多套伺服系統(tǒng)。
下位機是轉(zhuǎn)臺控制系統(tǒng)的直接控制級,構(gòu)成轉(zhuǎn)臺內(nèi)、中、外框三個獨立的伺服控制回路。下位機完成伺服控制系統(tǒng)的數(shù)據(jù)采集與處理、控制律的實施并實現(xiàn)與上位機實時通信。本系統(tǒng)中下位機由PMAC充當(dāng),PMAC控制卡通過標(biāo)準(zhǔn)總線與上位機相聯(lián),碼盤等測速或測角機構(gòu)通過PMAC上的DD接口傳遞位置、速度等信息,經(jīng)PMAC處理,并按上位機給出的控制要求通過PMAC上的DA接口輸出合適的電平信號控制轉(zhuǎn)臺上的電機運動,從而構(gòu)成控制閉環(huán)。
另外,PMAC通過總線向上位機交換報告轉(zhuǎn)臺位置、運行安全等信息,并從上位機獲得程序運行所需要的命令,如程序開始、結(jié)束和系統(tǒng)復(fù)位等。由于PMAC自身的特性,使諸如碼盤信號換算、行程限位等功能可以很方便地實現(xiàn),且PMAC的可編程特性使系統(tǒng)具有很強的擴展能力,整個系統(tǒng)構(gòu)成要比普通的上下位機系統(tǒng)顯得簡單實用。而PMAC的使用也使系統(tǒng)更具通用性,只需作少量調(diào)整即可應(yīng)用于其他設(shè)備。
4 運動控制系統(tǒng)軟件設(shè)計
本課題中下位機選用PMAC運動控制卡。該運動控制卡是現(xiàn)在使用的比較普遍、可靠性很高的多軸運動控制器,它的核心硬件是DSP與FPGA,提供運動控制、邏輯控制、數(shù)據(jù)采集、信息處理、同主機交互等強大的資源,其最大的特點是軟硬件的開放性。PMAC可以通過執(zhí)行軟件(PEWIN)實現(xiàn)各種控制的基本操作及系統(tǒng)調(diào)試,從而實現(xiàn)執(zhí)行運動程序、執(zhí)行PLC程序、伺服環(huán)更新、資源管理等主要功能。
對于轉(zhuǎn)臺的控制系統(tǒng),系統(tǒng)功能實現(xiàn)實際由工控機和PMAC卡共同分擔(dān)完成,運動控制軟件包括2個部分:工控機主要完成人機界面、系統(tǒng)任務(wù)管理、視頻顯示、方位角度計算與發(fā)送等功能;MAC卡主要實現(xiàn)所要求的運動控制、I/O管理、PLC等功能。
4.1上位機控制軟件的開發(fā)
對于轉(zhuǎn)臺控制系統(tǒng)上位機的工控機,基于WindowsXP操作系統(tǒng),利用VisualC++6.0開發(fā)系統(tǒng)開發(fā)了轉(zhuǎn)臺運動控制系統(tǒng)軟件,具有視頻顯示、轉(zhuǎn)臺控制方式選擇、轉(zhuǎn)臺運動狀態(tài)顯示、GPS信號顯示、異常報警等功能,利用下位機封裝好的各類運動控制函數(shù)和參數(shù)設(shè)置功能函數(shù),在上位機軟件開發(fā)時實現(xiàn)“下位機透明”式的開發(fā),使上位機界面開發(fā)以及和其他功能集成時無須關(guān)注運動控制層的細(xì)節(jié),從而更著重于其他方面功能的實現(xiàn)。
4.2下位機控制軟件的開發(fā)
下位機控制系統(tǒng)中PMAC卡上集成了豐富的運動控制指令和算法,為轉(zhuǎn)臺的運動控制提供了方便,對于轉(zhuǎn)臺控制下位機軟件的開發(fā),充分利用PMAC卡的開放性,主要包括位置伺服模塊、PLC監(jiān)控模塊等,位置伺服模塊可通過設(shè)置PMAC卡內(nèi)部PID參數(shù)實現(xiàn),PLC監(jiān)控模塊用于實時提取轉(zhuǎn)臺運行狀態(tài)信號,包括當(dāng)前的運行方位、運行速度及是否都達到位置限位等,主要包括PMAC的設(shè)置和PMAC運動程序的編寫。
4.3 工控機與PMAC卡的通信軟件
外部信號通過計算機串口送入工控機,轉(zhuǎn)換成方位角度后送入PMAC卡,轉(zhuǎn)臺的運動方位信息實時通過工控機進行顯示,同時,各種控制指令也是通過工控機傳給PMAC卡,從而實現(xiàn)各種控制目的,本系統(tǒng)利用PMAC卡提供的PCOMM32通信套件,采用動態(tài)鏈接庫方式,便于上下位機軟件的模塊化和封裝并使得上位機編程環(huán)境的選擇更加自由。
本課題以PMAC卡為核心對三軸轉(zhuǎn)臺的硬件及軟件進行了設(shè)計,通過PMAC構(gòu)建轉(zhuǎn)臺控制系統(tǒng),具有實時能力強、系統(tǒng)穩(wěn)定、易操作等優(yōu)點。將PMAC作為轉(zhuǎn)臺的控制器在理論和實際上都是可行的,使系統(tǒng)設(shè)計和應(yīng)用程序的設(shè)計大大簡化,設(shè)計者只需要較少的代碼就可以達到目的。另外,當(dāng)整個系統(tǒng)投入使用并進入維護階段,采用PMAC這樣的標(biāo)準(zhǔn)部件也減少了軟/硬件維護的困難,作為三軸轉(zhuǎn)臺的改造設(shè)計是一個非常好的方法。
-
變壓器
+關(guān)注
關(guān)注
159文章
7490瀏覽量
135590 -
控制器
+關(guān)注
關(guān)注
112文章
16385瀏覽量
178389 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6630瀏覽量
110658 -
計算機
+關(guān)注
關(guān)注
19文章
7511瀏覽量
88136
發(fā)布評論請先 登錄
相關(guān)推薦
近遠場測量控制系統(tǒng)的組成
基于ISA總線的無人機三軸仿真轉(zhuǎn)臺控制系統(tǒng)的設(shè)計
基于PMAC的開放式機器人控制系統(tǒng)
基于DSP三軸跟蹤轉(zhuǎn)臺伺服控制系統(tǒng)設(shè)計
多軸運動控制器在轉(zhuǎn)臺控制系統(tǒng)中的應(yīng)用
單軸轉(zhuǎn)臺伺服控制系統(tǒng)電路設(shè)計
基于ARM的伺服轉(zhuǎn)臺控制系統(tǒng)設(shè)計論文資料下載
小型兩軸光電轉(zhuǎn)臺控制系統(tǒng)設(shè)計與實現(xiàn)-雷巍
基于DSP的轉(zhuǎn)臺控制系統(tǒng)開發(fā)與應(yīng)用
PMAC控制的轉(zhuǎn)臺閉環(huán)系統(tǒng)的調(diào)試問題及解決方案
基于DSP的飛行仿真轉(zhuǎn)臺控制系統(tǒng)設(shè)計與實現(xiàn)
基于DSP的三軸轉(zhuǎn)臺控制系統(tǒng)設(shè)計與實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論