") 降低控制系統(tǒng)的PLC信息開關(guān)采集設(shè)計
降低控制系統(tǒng)的PLC信息開關(guān)采集設(shè)計
1 引 言
plc是近四十年發(fā)展起來的現(xiàn)代工業(yè)控制技術(shù),由于它把計算機的編程靈活、功能齊全、應(yīng)用面廣等優(yōu)點和繼電器系統(tǒng)的控制簡單、使用方便、抗干擾能力強、價格便宜等優(yōu)點結(jié)合起來,并且其本身具有體積小、功耗低、性能穩(wěn)定等特點,因而在工業(yè)生產(chǎn)過程控制中的得到了廣泛應(yīng)用,被稱為現(xiàn)代工業(yè)自動化的三大支柱(plc、 數(shù)控技術(shù)、工業(yè)機器人)之一。
對于輸入輸出點數(shù)比較少的系統(tǒng)可以不需要接口擴展;當點數(shù)較多時,需要進行輸入輸出擴展。不同公司的plc產(chǎn)品,對系統(tǒng)總點數(shù)及擴展模塊數(shù)量都有限制,當擴展仍不能滿足需要時,就不得不使用網(wǎng)絡(luò)結(jié)構(gòu),這既增加了系統(tǒng)的復雜度,也提高了系統(tǒng)成本。
針對大量開關(guān)量信號輸入的問題,以日本三菱公司的fx系列plc為例,本文設(shè)計了一種基于組掃描輸入的plc開關(guān)量采集方法,借助于輸入接口板,可以實現(xiàn)多個開關(guān)輸入信號接入plc單個輸入點,使用這種方法,對輸入點數(shù)較多的控制系統(tǒng),可以節(jié)省plc的輸入點數(shù),提高plc的信息采集效率效率,對降低控制系統(tǒng)成本具有重要意義。
2 硬件設(shè)計
對于工業(yè)現(xiàn)場中經(jīng)常會用到的開關(guān)、按鈕等開關(guān)量信號,通常按照圖1的配線方法接入plc的輸入點,該方法以com端作為所有開關(guān)量輸入信號的公共端,每一個開關(guān)或按鈕接入一個plc的輸入點。
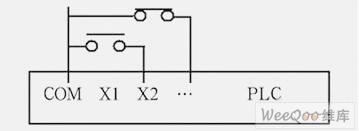
圖1 常用開關(guān)量信號接入方法
為解決大量開關(guān)量信號輸入問題,利用信號掃描原理,設(shè)計了一種基于組掃描輸入的plc開關(guān)量輸入采集方法,硬件結(jié)構(gòu)如圖2所示。圖中以16個開關(guān)量輸入信號為例,這16個開關(guān)量輸入信號被分為4組,分別接入四塊接口板(每塊接口板可接入4路信號,通過二極管輸出)。通過接口板后,k1、k5、k9、k13均接入plc的x1輸入端,依此類推,k2、k6、k10、k14均接入plc的x2輸入端,k3、k7、k11、k15均接入plc的x3輸入端,k4、k8、k12、k16均接入plc的x4輸入端,16個開關(guān)量輸入信號只占用了plc的4個輸入端。
4塊接口板分別由plc的4個輸出y1~y4選通(用虛線畫出),如當y1有效而y2~y4均無效時,接口板i被選通,此時k1~k4的信號被送入x1~x4,當y2有效而y1、y3、y4無效時,k5~k8的信號被送入x1~x4,另外兩組信號的送入方法相同。在這種結(jié)構(gòu)中,輸出端y代替com作為公共端。
這樣每個周期掃描4次,可分4次將16個信號送到plc的輸入端,每次掃描過后在程序中將x1~x4的狀態(tài)轉(zhuǎn)移到其他位置。16個輸入信號僅占用了4個輸入端和4個輸出端,節(jié)省了一半的plc輸入輸出點數(shù),在實際使用中還可以根據(jù)需要進行靈活擴展,獲得更高的使用效率。如若每塊接口板上接8個開關(guān)量輸入信號,4塊板共接入32個輸入信號,共占用plc的8個輸入端,輸出端仍然是4個。
設(shè)計時要注意接口板中二極管的選擇,一定要選擇質(zhì)量高、穩(wěn)定性好的二極管,如果出現(xiàn)二極管損壞或擊穿的情況,將會出現(xiàn)輸入信號不能被正確送入plc輸入端或出現(xiàn)輸入紊亂。另外輸入信號的組數(shù)不宜過多,圖2中是4組,若每次掃描時間間隔為100ms,則4次掃描的掃描周期是400ms,輸入信號的延遲最大可能達到400ms,若組數(shù)過多(如超過10組),會出現(xiàn)信號延遲導致系統(tǒng)的靈敏度下降。
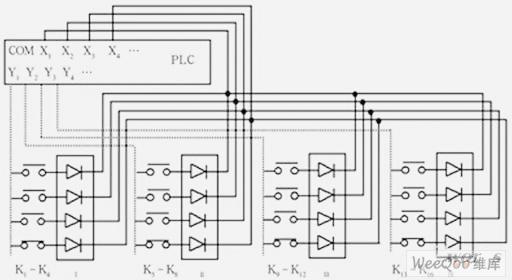
圖2 基于組掃描的plc開關(guān)量輸入采集硬件結(jié)構(gòu)
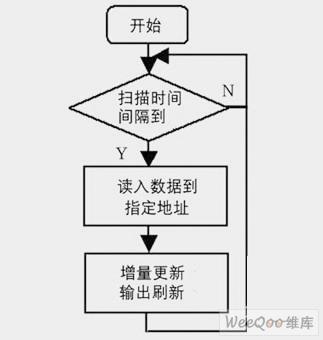
圖3 軟件流程圖
3 軟件設(shè)計
在軟件設(shè)計中要考慮兩個主要的問題。一是要定時輸出單個掃描選通信號,用來選通相應(yīng)的接口板,二是要及時將掃描進來的數(shù)據(jù)轉(zhuǎn)移到其他位置。在這種plc輸入設(shè)計方法中,在每個掃描周期,每組開關(guān)量信號中的一個依次送入一個plc輸入端,這樣就必須在下次掃描數(shù)據(jù)來臨前將上一次掃描進來的開關(guān)量信號狀態(tài)轉(zhuǎn)移到其他位置保存。
圖3為軟件流程圖,基于上述考慮設(shè)計的軟件程序(梯形圖)如圖4所示。每次掃描時間間隔100ms,16個開關(guān)量信息采集到plc后分別送入m100~m115保存,指令rol和ref的含義分別是循環(huán)左移和輸出刷新。
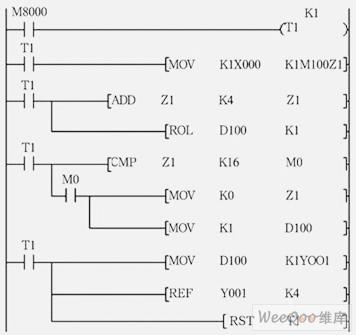
圖4 支持多點掃描輸入的plc輸入軟件實現(xiàn)
4 結(jié)束語
本文設(shè)計的一種基于組掃描輸入的plc開關(guān)量采集方法,利用信號掃描原理,能有效解決工業(yè)現(xiàn)場中存在的大量開關(guān)量信號輸入問題,該方法可以大大減少plc的輸入點數(shù),降低控制系統(tǒng)設(shè)計成本,系統(tǒng)結(jié)構(gòu)穩(wěn)定,擴展性、靈活性好,具有一定的使用價值和推廣意義。
-
繼電器
+關(guān)注
關(guān)注
132文章
5361瀏覽量
149387 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6655瀏覽量
110771 -
plc
+關(guān)注
關(guān)注
5016文章
13376瀏覽量
464704 -
計算機
+關(guān)注
關(guān)注
19文章
7530瀏覽量
88419
發(fā)布評論請先 登錄
相關(guān)推薦
揭秘基于GPRS的遠程信息采集控制系統(tǒng)的設(shè)計方案
基于MySQL的嵌入式Linux智慧農(nóng)業(yè)信息采集控制系統(tǒng)的設(shè)計資料分享
PLC控制系統(tǒng)設(shè)計概要
降低PLC控制系統(tǒng)成本的方法
PLC的控制系統(tǒng)設(shè)計
遠程康復信息采集控制系統(tǒng)的組成及其設(shè)計與實現(xiàn)

DCS系統(tǒng)基礎(chǔ)知識,DCS控制系統(tǒng)和PLC控制系統(tǒng),你會怎么選擇?

plc控制系統(tǒng)的優(yōu)點





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論