 全新結構開放數控系統的研究
全新結構開放數控系統的研究
1、研究背景
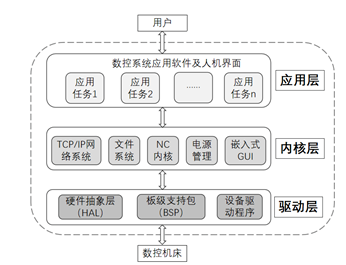
現在國內外關于開放式控制系統的研究和示范應用都著眼于PC機的軟硬件開發,其實質就是PC機在I/0接口和人機交互界面上的一個專門應用(參見圖1),在結構和性能上都存在很大局限性:首先,沒有定義獨立的適合于數控加工控制的開放結構,所具備的開放性都是計算機本身固有的開放特征,不是針對于數控加工特點來定義的,這種借鑒方式的代價就是要完全依賴于計算機的結構體系框架,PC計算機作為一個通用平臺無論從底層硬件設計和操作系統環境上都沒有對數控加工特殊性的考慮,因此不能很好的從根本上搭建數控平臺。其次,工控機模式的開放式數控系統不能很好的保證實時性和可靠性。PC計算機在運行時由于采用通用的操作系統,占用了很大的系統資源,與數控加工無關的任務可能占去了
更多系統的工作份額,他們干擾著系統對現場加工的及時響應,降低了系統對重要控制事件的處理速度,增加了系統運行的開銷,這些都會導致系統的不穩定。第三點,工控機模式數控系統的成本太高。一臺能滿足數控加工速度要求的計算機至少需要投資數千元再配上運動控制卡,使得成本很難降低。而一塊嵌入式微處理器才不過一百多元,所采用可編程器件的芯片也不過在百元左右,再加上所采用的實時操作系統是免費開放源代碼的,不會有軟件版權使用上的額外開銷,這些都使得成本有了很大程度的降低。確保了申請專利具有很好的性能價格比。第四點,當前工控機模式的開放式數控系統的網絡功能是基于計算機網絡的,這種網絡由于沒有考慮到數控加工和狀態監測對大流量信號數據流的傳輸要求,因此從速度上就限制了系統的遠程網絡應用能力,基本上只適用于系統間的程序傳輸。

另外,NC+PC模式的數控系統基本上不提供什么二次開發環境,只提供一些接口和參數的重新配置和定義功能,還有一些提供了PLC的編程功能和相應的編程工具,但這也只是對開關量的簡單配置。PC機模式的開放數控產品,一方面通過板卡上增減接口數來實現控制軸數和通道數的改變,另一方面通過將自己構建系統軟件的函數庫以封裝的形式提供給用戶來實現用戶自己動手配置系統控制的目的。但是,這種形式的開放無疑提高了對用戶二次開發的能力要求,開放沒有針對性,開放形式不友好,可操作性差。
本文正是基于上述問題,著眼于開放結構體系的層次化構建,狀態監測的網絡激活機制和二次開發平臺的智能化三個方面開展對全新結構開放數控系統的研究。
2、開放結構的層次化
層次化思想的設計目標是方便的實現系統的可擴展性和可配置性,這是判斷一個系統開放性特征的兩個重要指標。可擴展性是指系統可以靈活地增加硬件控制接口來實現功能的拓展和性能的提高;可配置性是指在不增加硬件結構的前提下,利用現有的底層結構模塊,通過配置和編譯控制軟件來實現系統的自定義。層次化體系結構以模塊化思想為核心,但又區別于一般的模塊化結構方法。層次化不僅考慮系統各組件之間的功能性特征,更要考慮組件之間的在整個結構體系中的所處控制環節的作用和地位,明確組件之間的繼承衍生關系,并且實際上通過定義這種繼承性和衍生性來作為劃分系統組件要素的一個標準,而不是單純靠功能標準來規劃系統的各個要素及其之間的關系。層次化不僅作為一種系統框架設計的思想,它可用于系統內部結構和外部結構的所有層面,當組件按照所需功能和性能要求被逐層細分時,同樣的衍生繼承關系和層次標準應用于組件中的每一個亞結構。
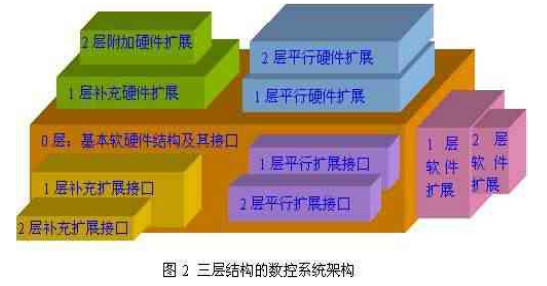
如圖2所示,層次化的數控系統具備一個基本的0層,它包括系統基本控制功能所需的所有組件以及滿足一般功能擴展必需的軟硬件接口,0層作為系統的核心結構必須具備良好的對內和對外接口,對內部既要保證組件之間相互通訊和訪問的暢通,又要保證內部結構的細節屏蔽,實現整個系統保持穩定性和安全性。0層以上的附加層建立在0層的擴展接口上,通過補充硬件和開放軟件接口來擴展系統的功能和提升控制的性能。
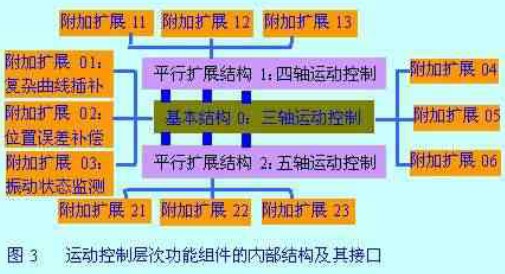
附加層分為兩種:補充擴展和平行擴展。補充擴展是在原有組件的基礎上通過開放新的接口配置不同的控制軟件形式來實現系統的功能擴展;平行擴展是完全增加一個同等結構的功能組件,來實現系統一種特殊的控制要求或開辟一個新的控制通道。區分這兩種擴展方式意義在于:充分利用兩種不同繼承形式,即結構性繼承和接口性繼承。附加擴展遵循接口性繼承,以功能點的形式嵌入到系統組件的接口層面,這一特征可以方便地將對個別功能的擴展要求的實現形式標準化,滿足用戶隨時出現的自定義需求。平行擴展遵循結構性繼承,以功能組整體的形式復制一個全新的功能通道,與原有層次形成平行的控制方案,這一特征可以將開放結構的整體性擴展運動控制模塊是數控系統的核心組件,基于開放結構的運動控制組件必須具備平行擴展和附加擴展兩種接口形式(見圖3)。平行擴展用于控制軸數的擴充,在基本三軸控制的基礎上,衍生出具備同種功能特性的四軸和五軸組件;附加擴展用于特殊功能的附加,是對用戶開放的自定義功能實現接口,基本組件和由平行擴展衍生出的組件都具備同等的附加擴展接口。圖三展示了一個基本三軸運動控制組件平行擴展為四軸和五軸運動控制組件,每個運動組件附加擴展了復雜曲線插補,位置誤差補償和振動狀態監測三個特殊功能。
3、二次開發平臺的智能化引導機制
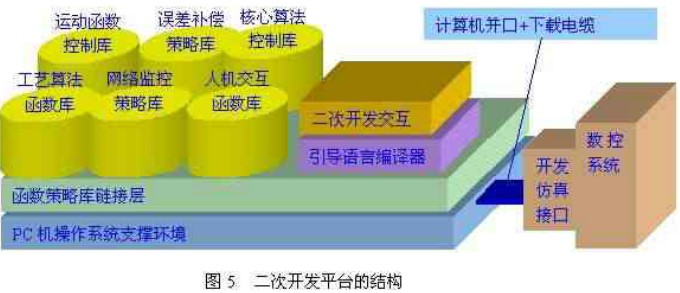
如圖5所示的二次開發平臺模型,我們采用一種引導開發的模式,借助于預先定義的各種信息庫,將使用特殊語言描述的用戶功能要求轉換成信息庫中特定策略的組合,然后通過與數控系統微控制核心相匹配的代碼編譯器,將策略描述翻譯并通過計算機的并口經由下載電纜傳送至數控系統的仿真開發接口。數控系統內部存在一個與之相對應的仿真開發專門存儲區,用于用戶訂制功能代碼的在線校驗,該存儲區與正常數控程序存儲區相互屏蔽,保證二次開發的安全性,并通過校驗策略和評價機制返回二次開發的性能指標。
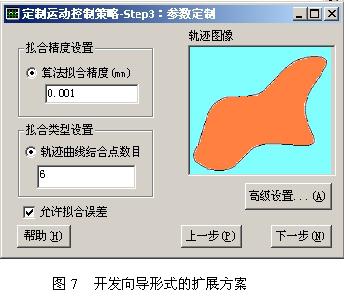
二次開發環境包括語言描述和引導設置兩種開發方式:語言描述方式采用結構化的功能機制,預先定義出系統擴展的算法結構,用戶只需根據算法的提示加入自己的功能要求的描述。二次開發平臺提供獨立的結構化描述語言(如圖6所示語法結構),采用面向對象的編程思想,以功能對象群組的構成方式來完整描述數控組件對象的特定工作狀態。語言描述方案,可以通過靈活定義的算法規范深入系統內部的軟件構成細節,適用于系統底層策略方案的自定義配置。引導設置采用開發向導的形式(如圖7所示開發界面)以圖形話詢問界面來定制用戶的擴展需求,一般用于較為簡單的擴展開發。這兩種機制結合起來,也構成了二次開發的層次化結構。
4、結論
采用層次化結構方案和微控制核心構建的開放式數控系統在體系結構上是一種全新的突破,層次化的思想滲透于整個系統的每個組件要素,以及引導型的智能化二次開發策略。層次化的構成框架將對數控系統的開發,使用和維護簡單的聯系起來,真正在數控設備的整個生命周期實現開放。
-
嵌入式
+關注
關注
5082文章
19104瀏覽量
304817 -
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
微處理器
+關注
關注
11文章
2258瀏覽量
82405
發布評論請先 登錄
相關推薦
掌上數控系統人機接口研究
怎么建立開放數控系統模型?
什么是開放式數控系統?有哪些應用?
資料下載;于LINUX的開放式結構數控系統組成及特點
基于PC的開放式數控系統體系的應用分析
五軸聯動數控系統的開放化設計
基于Windows CE.NET的開放式數控系統研究
什么是開放式數控系統?





 工商網監
工商網監
評論