") 機(jī)器人的移動監(jiān)督式控制器設(shè)計(jì)
機(jī)器人的移動監(jiān)督式控制器設(shè)計(jì)
1. 引言
戰(zhàn)爭是人們所不愿意見到的,但有時是不可避免的。為了在戰(zhàn)爭中取得優(yōu)勢,盡可能的減少人員傷亡和經(jīng)濟(jì)損失,世界上許多國家都投入大量的人力、財(cái)力研究制造軍用機(jī)器人。陸地微小型探查機(jī)器人是軍用機(jī)器人的一種。它具有體積小,結(jié)構(gòu)簡單,成本低廉,研究周期短,易實(shí)現(xiàn)“群”攻擊等特點(diǎn)。在真實(shí)戰(zhàn)爭中不易被發(fā)覺,容易靠近目標(biāo),可以獲得大量真實(shí)可靠和及時的數(shù)據(jù)。所以在現(xiàn)階段直接的戰(zhàn)斗型機(jī)器人還沒有突破性進(jìn)展的時候,探查機(jī)器人成為軍用機(jī)器人研究的熱點(diǎn)。
本文以中國科學(xué)院沈陽自動化研究所正在研制的小型地面探查機(jī)器人“山羊號”為試驗(yàn)基礎(chǔ),實(shí)現(xiàn)了機(jī)器人的監(jiān)督式控制器的設(shè)計(jì),并在這個機(jī)器人平臺上驗(yàn)證了監(jiān)督式控制的方式的理論可行性和優(yōu)越性。
2. 監(jiān)督式控制與其他控制方式的比較
移動控制器的設(shè)計(jì)是微小型探查機(jī)器人的一個研究重點(diǎn)。發(fā)展現(xiàn)代機(jī)器人控制系統(tǒng)的實(shí)踐經(jīng)驗(yàn)表明,在現(xiàn)有的理論和技術(shù)水平下,研究具備高度智能的全自主機(jī)器人的技術(shù)條件還遠(yuǎn)未成熟;對于野外機(jī)器人來說,由于通訊可靠性和時延性無法保證,環(huán)境多樣性復(fù)雜性導(dǎo)致信息獲取有限,純手動遙操作導(dǎo)致控制可靠性下降,復(fù)雜性增加。所以,研究和設(shè)計(jì)面向特定任務(wù)特有環(huán)境下的監(jiān)控式移動機(jī)器人是一種較為現(xiàn)實(shí)和可行的做法。
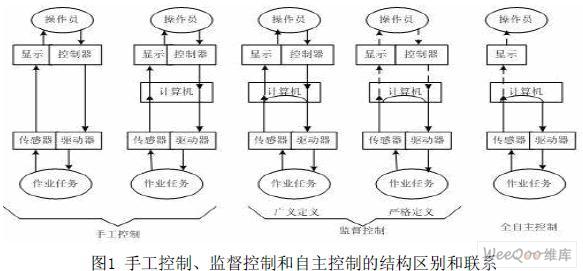
監(jiān)督控制最早由Ferrell和Sheridan于1967年在美國月球車計(jì)劃中明確提出。Sheridan對于監(jiān)督控制的定義為:一個或多個操作員間斷編程且連續(xù)不斷地從計(jì)算機(jī)接收信息,計(jì)算機(jī)利用傳感器和驅(qū)動器控制進(jìn)程或任務(wù)環(huán)境,負(fù)責(zé)閉環(huán)回路。監(jiān)督控制兩個重要地體現(xiàn)方式是共享控制和交互式控制。交互式控制定義為:操作員先執(zhí)行一部分工作,然后讓機(jī)器人自主地執(zhí)行另一部分工作;共享控制定義為:操作員處于遙操作狀態(tài),機(jī)器人處于自主狀態(tài),二者同時執(zhí)行任務(wù)。Sheridan曾列舉了計(jì)算機(jī)和人的4種相互關(guān)系:延伸(extend)、分擔(dān)(relieve)、備份(backup)、代替(replace)。人工控制,監(jiān)督控制和自主控制體系結(jié)構(gòu)上的區(qū)別和聯(lián)系,如圖1:
3. 系統(tǒng)構(gòu)成
野外探查機(jī)器人的用途決定這個機(jī)器人的結(jié)構(gòu)必須簡單,可靠,具備可替換和易升級的標(biāo)準(zhǔn),使其富有生命力。
3.1 硬件構(gòu)成
該機(jī)器人使用履帶—腿復(fù)合移動機(jī)構(gòu),復(fù)合型移動機(jī)構(gòu)主要是為移動機(jī)器人在非結(jié)構(gòu)環(huán)境中應(yīng)用而研究的,目的是提高其非結(jié)構(gòu)環(huán)境中的通過能力。項(xiàng)目稱之為“山羊號”機(jī)器人,見圖2:
核心主控制器使用了瑞士數(shù)字邏輯公司提供的PC104。作為一種比較新型和強(qiáng)大的總線形式和專用控制設(shè)備,PC104 采用了標(biāo)準(zhǔn)的積木式硬件結(jié)構(gòu),容易擴(kuò)展功能和端口;具有強(qiáng)大的運(yùn)算能力,使機(jī)器人具有處理速度快能力強(qiáng)的特點(diǎn);具有良好的耐熱、耐寒、防潮、抗震性能,適應(yīng)惡劣的野外條件。控制臺系統(tǒng)采用了與PLC 類似的德國WOGO 工業(yè)MODBUS 適配器作為控制核心,上位機(jī)下位機(jī)之間的通訊遵循了MODBUS 協(xié)議通過無線數(shù)傳電臺實(shí)現(xiàn)。WOGO 工業(yè)MODBUS 適配器模塊化的軟件設(shè)計(jì),穩(wěn)定可靠,非常適合于機(jī)器人控制臺數(shù)據(jù)采集和數(shù)據(jù)顯示等應(yīng)用。
機(jī)器人運(yùn)動控制系統(tǒng)是機(jī)器人控制各軸電機(jī)實(shí)現(xiàn)遙操作的核心。本系統(tǒng)采用了DeltaTau 公司提供的PC104 接口的PMAC2 型運(yùn)動控制卡,可以同時控制四個電機(jī),實(shí)現(xiàn)四軸聯(lián)動。可以實(shí)現(xiàn):執(zhí)行運(yùn)動程序、進(jìn)行伺服環(huán)更新、電機(jī)的換相更新、軟硬件安全資源管理、與主機(jī)通信、任務(wù)優(yōu)先級組織等等功能。是一塊極其強(qiáng)大的運(yùn)動控制卡。無線數(shù)據(jù)通訊系統(tǒng)采用美國MDS 無線數(shù)傳電臺,具有標(biāo)準(zhǔn)RS232 通訊口,采用無線擴(kuò)頻技術(shù),使用220M 頻段,主要用于遠(yuǎn)程無線點(diǎn)對點(diǎn)或多點(diǎn)間無線數(shù)據(jù)通訊,傳輸速度可以達(dá)15.2Kbps,使用2db 天線室內(nèi)通訊距離可以達(dá)到300 米。
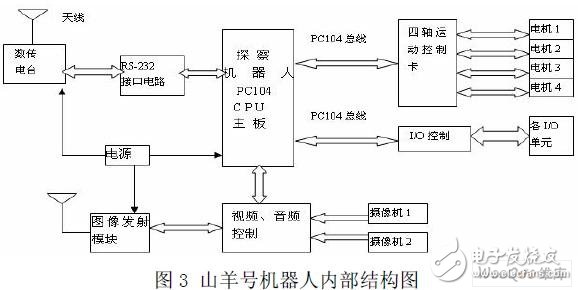
機(jī)器人觀察系統(tǒng)采用SURF 系列無線圖像發(fā)射/接受系統(tǒng),由兩個攝像頭及一套無線圖像發(fā)射/接受系統(tǒng)構(gòu)成,兩個攝像頭分別安裝在機(jī)器人本體的前端和本體上端。通過返回遠(yuǎn)程圖像實(shí)現(xiàn)對非結(jié)構(gòu)環(huán)境下的遠(yuǎn)程監(jiān)控。機(jī)器人內(nèi)部結(jié)構(gòu)如圖3:
3.2 軟件構(gòu)成
山羊號的軟件系統(tǒng)分為五個部分:機(jī)器人底層動作級控制模塊;上位機(jī)的研究人員的操作環(huán)境以及人機(jī)交互界面;上位機(jī)和機(jī)器人的通訊機(jī)制以及指令數(shù)據(jù)收發(fā)機(jī)制;機(jī)器人上的視覺采集傳輸模塊;上位機(jī)和下位機(jī)(機(jī)器人本體)的人工干預(yù)和切換控制機(jī)制模塊。機(jī)器人底層動作級別的控制由Delta Tau 的運(yùn)動控制卡完成,它可以同時對四個電機(jī)進(jìn)行控制,實(shí)現(xiàn)行走、擺臂、轉(zhuǎn)彎、翻身、支起等基本動作和一系列動作組合。
人機(jī)交互模塊基于windows 編程,通過WOGO 的MODBUS 適配器返回機(jī)器人狀態(tài),并且顯示機(jī)器人攝像頭采集到的圖像。操作人員可以在已有的機(jī)器人動作級別指令和任務(wù)程序的基礎(chǔ)上,添加新的任務(wù)程序或者修改現(xiàn)有指令程序。
因?yàn)樯窖蛱柕谋倔w操作系統(tǒng)是嵌入式實(shí)時多任務(wù)系統(tǒng)QNX,它可能會同時進(jìn)行或者完成多任務(wù),因此協(xié)調(diào)的通訊就很重要。其中包括:
(1)上位機(jī)和下位機(jī)的無線通訊,包括狀態(tài)數(shù)據(jù)反饋和控制指令的下達(dá)。
(2)主控制器PC104 和運(yùn)動控制卡間利用串口進(jìn)行的通訊,監(jiān)督任務(wù)的完成和動作的安全準(zhǔn)確。
(3)QNX 提供的多任務(wù)能力時各個任務(wù)間的通訊。
(4)I/O 口上的可以擴(kuò)展的各類傳感器與PC104 的通訊。
上位機(jī)和下位機(jī)(機(jī)器人本體)的人工干預(yù)和切換控制機(jī)制的實(shí)現(xiàn)方式主要有兩種。一是操作員直接接管機(jī)器人的控制,通過上位機(jī)操作桿控制機(jī)器人動作,并且由人完成任務(wù)規(guī)劃,此時機(jī)器人類似人工控制;二是操作員監(jiān)督機(jī)器人的任務(wù)執(zhí)行,并且由就人或者機(jī)器人主動發(fā)起中止任務(wù)和接替的指令,以保證任務(wù)的正常執(zhí)行和機(jī)器人的安全。這里面實(shí)現(xiàn)了監(jiān)督控制的思想。
監(jiān)督式移動機(jī)器人控制器主要完成的功能有:
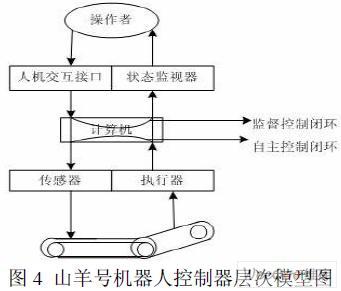
(1)外界環(huán)境信息、傳感器、處理器和動作執(zhí)行機(jī)構(gòu)形成閉環(huán),實(shí)現(xiàn)機(jī)器人局部自主能力的底層控制環(huán);
(2)接收、相應(yīng)操作員指令,完成人工干預(yù)和替換機(jī)制,形成人機(jī)控制閉環(huán)。因此,山羊號監(jiān)控系統(tǒng)主要分成兩個子系統(tǒng),它的層次模型如圖4,對應(yīng)監(jiān)督控制的定義,顯然它是一個監(jiān)控式機(jī)器人控制器。
山羊號機(jī)器人控制器的任務(wù)執(zhí)行和控制流程如下:
(1)操作者擬出任務(wù)規(guī)劃,并生成機(jī)器人可完成和可以接受的一個動作序列的機(jī)器人語言指令;
(2)將指令傳到機(jī)器人本體,由機(jī)器人控制器接收并完成;
(3)如果任務(wù)規(guī)劃已經(jīng)加入知識庫中,操作者調(diào)出對應(yīng)任務(wù)代號并監(jiān)視機(jī)器人完成;
(4)對于已經(jīng)加入知識庫的任務(wù),機(jī)器人在傳感器信息的支持下自主完成,操作者僅作為監(jiān)視者;
(5)在任何狀態(tài)和控制方式下,操作者通過返回信息發(fā)現(xiàn)異常情況,均可以干預(yù)或者緊急中止任務(wù),將前面任務(wù)指令作廢,完全轉(zhuǎn)入手動控制;
(6)給機(jī)器人本體加入自主中止模式,在任務(wù)執(zhí)行過程中,如果由于延時或者故障等原因造成信息無法及時反饋,機(jī)器人由傳感器信息判斷如果情況危及機(jī)器人安全或者任務(wù)序列無法繼續(xù)執(zhí)行,將中止任務(wù)等待人工進(jìn)行任務(wù)的恢復(fù)或者取消。
4. 實(shí)現(xiàn)情況
現(xiàn)在該機(jī)器人已經(jīng)可以實(shí)現(xiàn)上下標(biāo)準(zhǔn)人行樓梯、跨溝(小于30cm)、翻倒自動復(fù)位、上下高臺(高度小于30cm)、在沙地行走等功能。人機(jī)具有了較好的協(xié)調(diào)性和控制性。如上圖2 可以看到其對應(yīng)的某些行為能力。
5. 結(jié)論
監(jiān)督式控制器在野外移動機(jī)器人的控制上有著良好的適應(yīng)性,操作者可以通過監(jiān)視器和狀態(tài)反饋觀察任務(wù)執(zhí)行,大大減輕了操作者的工作壓力和技能要求;機(jī)器人具有一定的自主能力,并且在監(jiān)控層次模型下,可以進(jìn)一步開發(fā)機(jī)器人的自主能力,很容易進(jìn)行系統(tǒng)的升級,也可以作為機(jī)器人自主控制的研究平臺;人、機(jī)分別可操作的緊急模式,在遠(yuǎn)距控制中,對于信號延誤、非結(jié)構(gòu)環(huán)境的不確定、機(jī)械和電子故障等情況引起的機(jī)器人安全性問題,有了一個比較穩(wěn)妥和可行的方案。在后續(xù)的研究中,將會進(jìn)一步裝配各類傳感器,提高機(jī)器人的自主能力,加入機(jī)器人在線學(xué)習(xí)更新知識庫的能力,改進(jìn)操作者界面使其更加人性化等,使得山羊號既能成為一個開發(fā)研究平臺,同時也能成為一個實(shí)際可靠可用的產(chǎn)品。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51215瀏覽量
754543 -
控制器
+關(guān)注
關(guān)注
112文章
16396瀏覽量
178485 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28497瀏覽量
207450 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7518瀏覽量
88185
發(fā)布評論請先 登錄
相關(guān)推薦
Labview My RIO 移動機(jī)器人
如何利用ARM研究嵌入式服務(wù)機(jī)器人控制器?
如何設(shè)計(jì)智能滅火機(jī)器人控制器?
【送貨上門】SC3150三協(xié)機(jī)器人控制器
如何實(shí)現(xiàn)移動機(jī)器人的設(shè)計(jì)?
基于RTX51的排爆機(jī)器人嵌入式控制器軟硬件開發(fā)怎么樣?
差速移動機(jī)器人軌跡跟蹤控制方法
機(jī)器人是什么?
相撲機(jī)器人控制器資料分享
通過多軸工業(yè)機(jī)器人來聊聊機(jī)器人控制系統(tǒng)以及控制器的實(shí)現(xiàn)
移動探查機(jī)器人監(jiān)督式控制器的設(shè)計(jì)與實(shí)現(xiàn)
移動機(jī)器人控制系統(tǒng)設(shè)計(jì)與仿真

因?yàn)閷W?所以專業(yè) | 科聰移動機(jī)器人專用控制器重磅來襲

因?yàn)閷W?所以專業(yè) | 科聰移動機(jī)器人專用控制器重磅來襲






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論