 ADISl6355傳感器在四軸飛行器姿態檢測中的應用
ADISl6355傳感器在四軸飛行器姿態檢測中的應用
引言
四軸飛行器是瑞士科技人員研制成的一種新型飛行器,也是一種娛樂機器人。它利用旋翼來進行空中飛行,用于娛樂,它能彈鋼琴曲。四軸飛行器其構造特點是在它的四個角上各裝有一旋翼,由電機分別帶動,葉片可以正轉,也可以反轉。為了保持飛行器的穩定飛行,在四軸飛行器上裝有3個方向的陀螺儀和3 軸加速度傳感器組成慣性導航模塊,它還通過電子調控器來保證其快速飛行。
1.慣性測量傳感器
傳感器是一種能把物理量或化學量轉變成便于利用的電信號的器件。國際電工委員會(IEC:International Electrotechnical Committee)的定義為:“傳感器是測量系統中的一種前置部件,它將輸入變量轉換成可供測量的信號”。按照Gopel等的說法是:“傳感器是包括承載體和電路連接的敏感元件”,而“傳感器系統則是組合有某種信息處理(模擬或數字)能力的系統”。傳感器是傳感系統的一個組成部分,它是被測量信號輸入的第一道關口。傳感器把某種形式的能量轉換成另一種形式的能量。有兩類:有源的和無源的。有源傳感器能將一種能量形式直接轉變成另一種,不需要外接的能源或激勵源。
慣性測量傳感器是ADI公司推出的一款具有-40~85℃溫度范圍內校準、SPI接口輸出的六自由度慣性測量傳感器,出廠前已經對產品的零偏和靈敏度進行了全溫校準。ADISl6355的輸出零偏穩定性為0.015°/s,溫度系數為0.008(°/s)/℃,角度隨機游走為4.2°/s,適于精度要求較高的應用。ADISl6355的結構框圖如圖1所示。傳感器內部完成了信號的采集、校準與濾波處理,具有自檢功能,還有1路ADC輸入、1路DAC輸出和2路數字I/O。SPI接口能夠輸出3個角速率信號、3個線加速度計信號、3個溫度傳感器信號和電源電壓信號。

2 應用電路設計
公司的32位STM32系列微控制器是專門為微控制系統、工業控制系統和無線網絡等對功耗和成本敏感的嵌入式應用領域而設計的。ST-M32F103VB是一款基于ARMv7-M體系結構的32位標準處理器,工作頻率高達72 MHz,具有3個通用定時器、1個高級控制定時器、7個獨立的DMA通道、1個USB接口、3個USART接口、2個SPI接口和2個I2C接口。
2.1 ADlSl6355接口電路
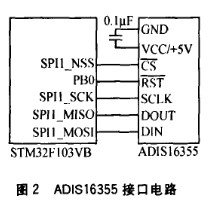
與STM32F103VB通過標準SPI接口進行連接,其硬件接口電路如圖2所示。ADIS16355的SCLK、DOUT、DIN、CS、RST腳分別與ST-M32F103VB的SPll~SCK、SPll_MISO、SPll_MOSI、SPll_NSS、PB0腳連接。
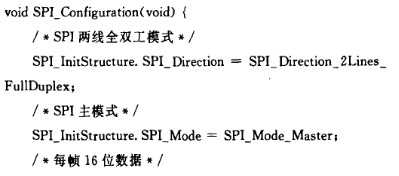
的SPI接口配置為全雙工主模式,每幀傳輸16位數據,每幀先發送MSB。時鐘極性配置為空閑狀態時,SCK保持高電平;時鐘相位配置為數據采樣從第二個時鐘邊沿開始。通信的波特率配置為64分頻,為1.125 MHz。為提高SPI的速度,降低CPU資源的使用率,采用了SPI的DMA模式,SPI接收到的數據直接存儲在定義好的數組里。STM32F103VB的SPI接口配置程序如下:
2.2 無線數據傳輸模塊及其接口
無線數據傳輸是指利用無線傳輸模塊將工業現場設備輸出的各種物理量進行遠程傳輸,如果傳輸的是開關量,也可以做到遠程設備遙測遙控。無線數傳設備DTD433可以提供高穩定、高可靠、低成本的數據傳輸。它提供了透明的RS232/RS485接口,具有安裝維護方便、繞射能力強、組網結構靈活、大范圍覆蓋等特點,適合于點多而分散、地理環境復雜等應用場合。該設備提供點對點通信,也可以實現點對多點通信,不需要編寫程序,不需要布線。一般電工調試也可以通過。無線數據傳輸設備廣泛應用于無線數傳領域,典型應用包括遙控、遙感、遙測系統中的數據采集、檢測、報警、過程控制等環節。
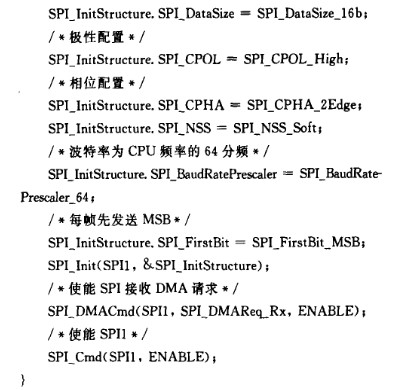
無線數據傳輸模塊使用的是nRF2401芯片,它工作于2.4GHz ISM頻段,輸出功率和通信頻道可通過程序進行配置。該模塊功耗非常低,以-5 dBm的功率發射時工作電流只有10.5 mA,接收時工作電流只有18 mA。實際使用時其無線傳輸距離可達30 m,最大傳輸速率可達1000 kbps。單片機和無線數據傳輸模塊的連接使用普通的I/O口,其電路設計如圖3所示。
2.3 電源模塊
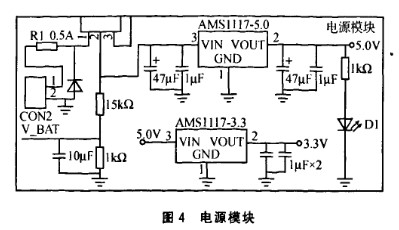
電源模塊主要為STM32F103VB、ADISl6355和無線數據傳輸模塊供電,其電路設計如圖4所示。鋰電池提供的11.1 V電源經ASMlll7-5.O轉換為5 V,再經過ASMlll7-3.3轉換為3.3 V。其中,5 V為ADISl6355提供電源,3.3 V為STM32F103VB和無線數據傳輸模塊提供電源。Dl是用于電源指示的LED,Rl為O.5 A可恢復保險。
3 四軸飛行器姿態估計
四軸飛行器的姿態主要指它在地面坐標系中的3個姿態角,即俯仰角、橫滾角和偏航角。其中,俯仰角和橫滾角可以通過對陀螺的角速度積分得到,也可通過3個軸向的加速度推算出來,但偏航角只能對角速度積分得到。由于在四軸飛行器測試平臺上檢測姿態,對偏航角先不做要求。四軸飛行器的姿態控制系統模型中3個軸向的加速度可表示為:
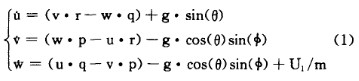
其中,u、v、w為機體坐標系下3個軸向的線速度,p、q、r為機體坐標系下繞3個軸的角速度,θ、φ為四軸飛行器的俯仰角和橫滾角,U1為總的升力,m為飛行器的質量。在試驗平臺上檢測時,四軸飛行器的位置固定不變,上式可簡寫成:

其中,為加速度計測得的加速度,通過式(2)可推算得到俯仰角和橫滾角如下:
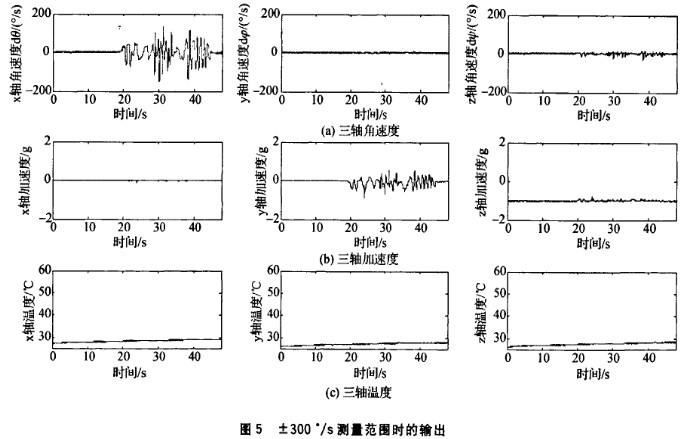
配置陀螺的測量范圍為±300°/s,1 min內測得的ADISl6355三個軸的角速度、加速度和溫度曲線如圖5所示。在約19 s時使飛行器繞x軸進行滾轉運動,在約45 s時使飛行器恢復到剛開始的靜止狀態。由圖5可知,靜止時角速度的輸出范圍為±2°/s,x、y軸加速度計的輸出范圍為±O.015 g,溫度由26℃到30℃逐步上升。
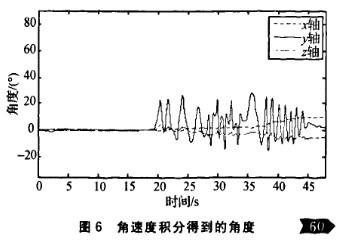
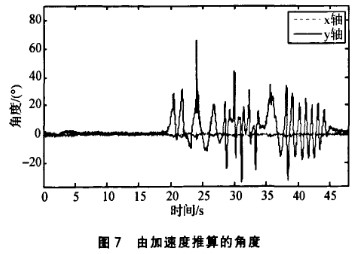
對角速度進行積分得到飛行器的三個姿態角,如圖6所示。通過式(3)由加速度信息推算的兩個角度如圖7所示。對比圖6和圖7可知,由角速度積分得到的角度最終不是靜止時的0°。原因是陀螺存在漂移,隨著時間的積累,測量的誤差會在積分中一直累加,而由加速度信息推算出來的角度就不存在漂移。圖7中約第24 s時,y軸角度出現一個峰值(高達70°),而實際的旋轉角度只在±30°之間,其原因是振動引起加速度值突增,導致推算出的角度過大。
結語
實際使用中,加速度計對振動非常敏感,應根據應用的場合對加速度數據進行處理。四軸飛行器具有4個無刷電機,實際飛行時電機引起的振動非常大,如果簡單地通過加速度來推算角度就會出現很多圖7中第24 s的尖點,與實際情況不符合。
本文使用STM32F103VB單片機對慣性測量傳感器ADISl6355進行數據采集,并通過無線數據傳輸模塊把數據發送回計算機。利用ADISl6355對四軸飛行器姿態進行檢測,可分別利用角速度信息和加速度信息對飛行器姿態進行估計,兩種方法各有優缺點,在實際使用時要綜合進行考慮。
-
傳感器
+關注
關注
2550文章
51046瀏覽量
753140 -
機器人
+關注
關注
211文章
28390瀏覽量
206956 -
定時器
+關注
關注
23文章
3246瀏覽量
114742
發布評論請先 登錄
相關推薦
【MiCOKit申請】四軸飛行器的原理與制作
【云智易申請】四軸飛行器的原理與制作
【OK210申請】四軸飛行器的原理與制作
【Embedded Pi申請】四軸飛行器
【CANNON申請】四軸飛行器
四軸飛行器開發解密
四旋翼飛行器設計指南(原理、程序、電機資料)
【設計技巧】四軸飛行器姿態算法
ADISl6355 MEMS的慣性測量組件系統設計






 工商網監
工商網監
評論