

引言
當今,開放式數控系統正在工業領域得到廣泛應用。其中,工控機通過PCI總線連接專用運動控制卡的數控系統最為流行。在運動控制卡中,由于DSP采用多總線哈佛結構使得處理指令和數據可以同時進行,因此相比傳統控制中的單片機具有更多的優勢。同時,運動控制卡與PC機通過PCI局部總線通信,能夠達到很高的數據傳輸速率,從而還保證了數控系統的實時性。
系統概述
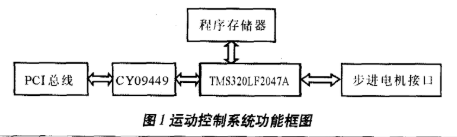
系統的功能框圖如圖1所示。該系統的核心是TI公司的16位定點DSP芯片TMS320LF2407A。DSP芯片負責接收PCI局部總線的命令和參數,然后經過特定的運動控制算法,如系統位置、速度調節、插補算法等,從而完成對步進電機的精確運動控制。同時DSP芯片還負責將反饋信息傳輸給PCI局部總線,并且控制系統外圍I/O模塊。DSP芯片與計算機的通信通過PCI橋接芯片CY09449實現。
DSP模塊
DSP芯片TMS320LF2407A采用高性能靜態CMOS工藝,供電電壓僅3.3V;指令周期縮短到33ns。
作為系統的核心,TMS320LF 2407A主要完成復雜的運動控制算法,比如升降頻控制、插入補償等。本設計主要是完成雙軸步進電機控制,故插入補償采用經典的DDA算法。由于本設計對步進電機采用無反饋控制,這樣對步進電機的升降頻控制就顯得格外重要,這也成了整個系統設計的一個難點。根據步進電機變速過程動力學特性,以指數曲線前段規律作為前后沿的近似梯形波,進而確定升降頻特性,這樣既能保證步進電機運行過程不會失步,又充分發揮了步進電機的固有性能,使升頻過程達到時間最短的要求。下面討論一下升降頻控制的算法實現。
升降頻控制
為實現所確定的運行頻率—時間函數,通常是將其離散化,即將其轉換為脈沖時間間隔對脈沖個數的函數。另一種方法是按升降頻過程所走過的脈沖步數通過定步中斷來變頻。但是離散化方法既會引起頻率突跳和失步,又要進行復雜的迭代運算,而定步法同樣需要進行迭代。這兩種方法在DSP上都不易實現且靈活性較差。為此本文研究了一種稱為定時的方法。
設最高運行頻率為fh(電機恒速段的速度),升頻段總時間為ts。則根據步進電動機指數型升頻過程的頻率—時間關系:
f(t)=fM-(fM-fb)*exp(-t/T) (1)
式中fb為步進電動機起動頻率;fM為極限運行頻率;T為驅動系統時間常數
則有fh=f(ts)=fM-(fM-fb)*exp(-ts/T)
從而得到
ts=T*ln((fM-fb)/(fM-fh)) (2)
將ts等分為N段,得到各段時間為:ta=ts/N
則在第i個等分段ta內脈沖切換頻率和要送出的脈沖數分別為:
f[i]=f(i*ta)=fM-(fM-fb)*exp(-i*ta/T)(3)
X[i]=ta*f[i] (4)
故升頻段的總步數為:
P=X[0]+X[1]+…+X[N-1] (5)
將脈沖間隔1/f[i]轉換為DSP內部16位定時器的時間常數K[i]。轉換關系式為
K[i]=f_DSP/f[i], i=0,1,2…, N-1 (6)
由于降頻段特性變化規律與升頻段相反,可知降頻序列是升頻序列的逆序列。
電機在恒速步進階段,以fh的換相頻率步進。因此對應的定時器時間常數為:
K[N]=f_DSP/fh (7)
恒速段總步數為:
X_h=X_total-2*P (8)
式中X_total為步進電機運動的總步數。
電機運行前,由主程序計算出升頻段和恒速段定時器時間常數序列K[i](i=0, …,N-1),存放于DSP的SARAM中,形成一個K-P升速表格。當電機運行時,在線查表,并取出K[i]用于設置DSP的PWM中周期寄存器的值,從而不斷改變PWM波形的周期,實現對電機的速度調節。根據升速、降速或高頻恒速,決定升速表地址指針增1、減1或不變。通過這種定時的方法,一方面提高了系統的靈活性,可根據輸入的最高頻率、起動頻率等參數改變升降速表,另一方面升降速表的求取不占用運行時間,從而提高了運行效率。
系統的部分軟件流程
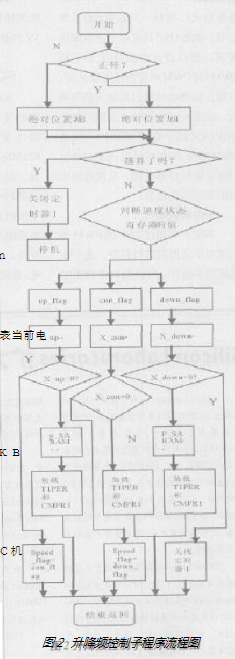
圖2為升降頻控制子程序流程圖,其中:p_SARAM為指向電機升降速時間常數表的指針,采用DSP的內部SARAM來存放該表;X_up、X_con、X_down分別代表電機在升速段、恒速段、降速段要走的總步數;up_flag、con_flag、down_flag分別代表當前電機的運動狀態(升速、恒速、降速)。
DSP與PC機的通信
DSP與PC機的通信通過CY09449連接,CY09449內部帶有128KB雙向靜態SRAM,為了在工作中,使PC機和DSP對SRAM的訪問不會發生沖突,本設計中把SRAM均分為兩個單元A和B, PC機和DSP對這兩部分的操作采用乒乓操作模式。由于DSP具有外部數據存儲器擴展能力,所以該SRAM完全可以作為DSP的外擴數據存儲器,這樣在設計中便采用DSP的外部數據存儲器有效信號/DS來作為CY09449的片選信號/SELECT。
DSP的編碼接口
本設計也考慮到如果需要對電機進行高級精確控制時,就需要對電機進行閉環控制。一般情況下,會運用光電編碼器作為系統的閉環反饋元件。由于本設計是針對雙軸步進電機的運動,而單軸的光電編碼器就輸出兩相相差為90°的脈沖信號A、B,以及歸零信號Z(都是差分形式),這樣一共就有6路反饋信號。但是DSP只有兩個正交編碼單元,所以設計中把DSP的引腳PWM9和PWM10設為通用輸入腳。這樣,反饋信號經過高速光耦隔離后,就送入到DSP的正交編碼接口QEP1/QEP2、QEP3/QEP4,以及PWM9/PWM10,然后由DSP對該反饋信號進行計算處理,從而得出電機的實際運動信息。
步進電機接口
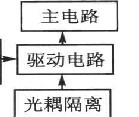
本設計中通過DSP的PWM單元來對步進電機進行控制。由于電機是功率器件,所以由DSP輸出的PWM波形不能直接輸入到驅動器中,而是必須采用光耦進行隔離,這樣才能避免電機的大電壓信號把DSP燒壞。此外由于DSP輸出的PWM信號很弱,如果直接加在電機驅動器上,驅動器將檢測不到該信號,所以在DSP的PWM信號輸出級需加長線驅動。本設計中采用了5V的差分長線驅動器AM26LS31。
PCI模塊
本系統選擇PCI局部總線作為DSP與上位機的通信方式,主要是因為PCI總線速率最高可達528Mbps,實時性強。PCI總線的開發一般可以有兩種方案實現:一種是用FPGA實現;另一種則是使用專用的PCI接口芯片。為節省時間本系統選擇專用芯片CY09449進行開發。該芯片采用3.3 V 單電源供電,兼容3V和5V 的PCI信號環境。CY09449的電源可由PCI槽引出,PCI槽可以提供3.3V、5V、12V電壓,在PCI槽有兩個引腳需特別注意:PRSNT1和PRSNT2,這兩個引腳接地和懸空的4種組合直接決定PCI卡的功率。CY 09449在使用時,某些引腳要加阻值為1k?~1Ok?的下拉或上拉電阻。根據本系統地具體情況在該設計中,SCL、SDA、ALE、/BE[2]、RDY_IN引腳加上拉電阻, TEST_MODE引腳加下拉電阻。
結語
基于PCI總線,配以數據處理能力強大的DSP設計的步進電機運動控制卡,在開放式數控系統中能夠發揮出理想的運動控制性能。隨著數控系統的普及和產品檔次的提高,這種運動控制卡將會有廣泛的應用前景。
責任編輯:gt
-
dsp
+關注
關注
555文章
8111瀏覽量
353839 -
芯片
+關注
關注
459文章
51838瀏覽量
432421 -
工控機
+關注
關注
10文章
1806瀏覽量
51318
發布評論請先 登錄
相關推薦
基于TMS320LF2407A的調音器設計
如何使用TMS320LF2407A的bootrom
基于TMS320LF2407A的全數字單相變頻器的設計及實現方法
TMS320LF2407A為數字控制系統的設計提供了參考
基于TMS320LF2407A直流電機閉環調速控制系統的設計
TMS320LF2407A基于CAN總線技術的數字交流伺服系
基于DSP芯片TMS320LF2407A的全數字單相變頻器的





 工商網監
工商網監

評論