") 基于PIC16C63單片微機(jī)和模糊控制器實(shí)現(xiàn)新型電機(jī)調(diào)速系統(tǒng)的設(shè)計(jì)
基于PIC16C63單片微機(jī)和模糊控制器實(shí)現(xiàn)新型電機(jī)調(diào)速系統(tǒng)的設(shè)計(jì)
傳統(tǒng)PID控制的電機(jī)調(diào)速系統(tǒng)技術(shù)成熟,結(jié)構(gòu)簡(jiǎn)單,較穩(wěn)定可靠,應(yīng)用較為廣泛,但也存在一些缺點(diǎn),例如無法有效地克服傳動(dòng)對(duì)象和負(fù)載參數(shù)的大范圍變化以及非線性因素對(duì)系統(tǒng)造成的影響,因而不能滿足高性能和高精度的要求。隨著模糊控制技術(shù)的成熟,應(yīng)用越來越廣泛,人們也開始將它應(yīng)用于電機(jī)調(diào)速中。使用模糊控制技術(shù)后,能充分利用其非線性結(jié)構(gòu)自尋優(yōu)等各種功能,從而顯著提高系統(tǒng)的魯棒性(robustness)。此外,由于不需要建立被控對(duì)象的精確數(shù)學(xué)模型,系統(tǒng)的設(shè)計(jì)也變得較為簡(jiǎn)便。本文研究的這種新型電機(jī)調(diào)速系統(tǒng),用模糊控制器替代傳統(tǒng)的PID調(diào)節(jié)器,能明顯改善系統(tǒng)的穩(wěn)態(tài)和動(dòng)態(tài)性能,有較好的控制效果。
系統(tǒng)硬件結(jié)構(gòu)
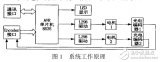
系統(tǒng)硬件結(jié)構(gòu)如圖1所示。系統(tǒng)主要由單片微機(jī)PIC16C63、顯示器、整流電路、直流變換、斬波電路、轉(zhuǎn)速檢測(cè)電路、直流無刷電動(dòng)機(jī)(額定電壓48V,額定轉(zhuǎn)速2000r/min)等組成。
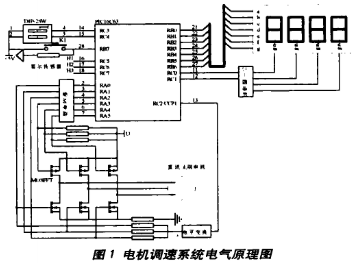
PIC16C63是MICROCHIP公司的8位CMOS單片微處理器;只有35條基本指令;片內(nèi)有三個(gè)多功能輸入輸出I/O口RA、RB和RC,其中RB、RC口為8位,RA口為5位,可直接驅(qū)動(dòng)LED;3個(gè)帶8位可編程預(yù)分頻器的8位定時(shí)/計(jì)數(shù)器;2個(gè)CCP(捕獲/比較/PWM)模塊,可輸出PWM信號(hào)(從RC2/CCP1和RC1/CCP2引腳輸出);192字節(jié)通用RAM,4096×14位EPROM;數(shù)字式的看門狗電路DWD;10個(gè)內(nèi)部和外部中斷源;程序代碼加密保護(hù);使用最高晶振20MHz;電源范圍2.5~6.25V。
設(shè)置CCP1模塊工作于PWM方式。把脈寬值置入CCPR1L寄存器和CCP1CON5:4》,RC2/CCP1引腳可輸出高達(dá)10位的脈寬調(diào)制波形。當(dāng)每次將CCPR1L中的數(shù)據(jù)再載入CCPR1H時(shí),RC2/CCP1輸出高電平;當(dāng)定時(shí)/計(jì)數(shù)器TMR2的計(jì)數(shù)值等于CCPR1H的值時(shí),RC2/CCP1輸出低電平,產(chǎn)生脈寬。TMR2繼續(xù)遞增,直至計(jì)數(shù)值等于周期寄存器PR2的值,此時(shí)RC2/CCP1輸出高電平,產(chǎn)生PWM周期,同時(shí)使CCPR1L再載入CCPR1H,如此周期循環(huán),產(chǎn)生PWM信號(hào)。PWM輸出周期和脈寬的計(jì)算公式如下:
PWM周期=[(PR2)+1]*4TOSC*(TMR2預(yù)分頻值)
PWM脈寬=(DC1)*4TOSC*(TMR2預(yù)分頻值)
式中的DC1的值由8位的CCPR1L和CCP1CON5:4》2位組成。由此若PWM周期確定后,要獲得不同占空比的PWM信號(hào),只要改變DC1的值即可。
系統(tǒng)的基本工作原理為:轉(zhuǎn)速由霍爾位置傳感器檢測(cè),測(cè)得的實(shí)際轉(zhuǎn)速與給定速度進(jìn)行比較,將輸入變量模糊化(fuzzification)后進(jìn)行模糊推理,產(chǎn)生相應(yīng)的PWM信號(hào)從RC2/CCP1引腳輸出。圖1中,當(dāng)RC2/CCP1輸出低電平時(shí),六只MOSFET仍受RA口控制進(jìn)行電動(dòng)機(jī)的正常換相;當(dāng)RC2/CCP1輸出高電平時(shí),下半部的三只MOSFET被封死。因此,只需對(duì)RC2/CCP1的輸出進(jìn)行PWM控制,就可以控制直流無刷電動(dòng)機(jī)的轉(zhuǎn)速。整流電路的輸出除提供給直流電動(dòng)機(jī)電源外,還通過DC-DC變換器獲得5V電源提供給單片機(jī)。系統(tǒng)設(shè)置一個(gè)2位的DIP開關(guān),用于選擇給定轉(zhuǎn)速,有四個(gè)不同的給定轉(zhuǎn)速供選擇,以滿足不同運(yùn)行狀態(tài)和不同額定轉(zhuǎn)速的電動(dòng)機(jī);按鍵K1用于顯示給定轉(zhuǎn)速,按下則顯示給定轉(zhuǎn)速,否則顯示實(shí)時(shí)轉(zhuǎn)速。4個(gè)LED顯示器組成了顯示電路。
模糊控制器
模糊控制方法
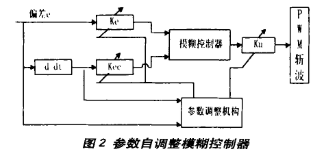
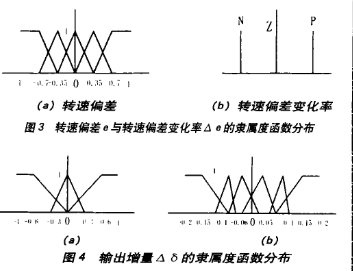
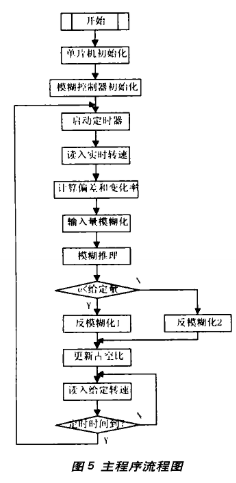
模糊控制器結(jié)構(gòu)如圖2所示,是一個(gè)參數(shù)自調(diào)整的模糊控制系統(tǒng),其輸入變量是轉(zhuǎn)速偏差e和轉(zhuǎn)速偏差變化率Δe,輸出變量是PWM脈寬調(diào)制信號(hào)占空比δ的增量Δδ。在進(jìn)行輸入變量模糊化時(shí),轉(zhuǎn)速偏差e在其論域(full set)上定義3個(gè)模糊集隸屬度函數(shù),相應(yīng)的語言變量為負(fù)(N)、零(Z)和正(P),其隸屬度函數(shù)分布如圖3(a)所示。轉(zhuǎn)速偏差變化率Δe在其論域上定義6個(gè)模糊集隸屬度函數(shù),相應(yīng)的語言變量為負(fù)大(NB)、負(fù)小(NS)、負(fù)零(NZ)、正零(PZ)、正小(PS)和正大(PB),其隸屬度函數(shù)分布如圖3(b)所示。轉(zhuǎn)速偏差e的模糊集只簡(jiǎn)單的劃分為3個(gè),而轉(zhuǎn)速偏差變化率的模糊集卻劃分為6個(gè),一方面是考慮模糊控制器的結(jié)構(gòu)優(yōu)化問題[3],優(yōu)化后的模糊控制系統(tǒng)只有18條模糊規(guī)則;另一方面是滿足控制精度的要求,根據(jù)直流電動(dòng)機(jī)的運(yùn)行特點(diǎn),在控制時(shí)為了達(dá)到控制精度的要求,有時(shí)更注重轉(zhuǎn)速偏差變化率。采用這樣的結(jié)構(gòu)可使系統(tǒng)在轉(zhuǎn)速偏差變化率比較小時(shí)獲得精細(xì)調(diào)節(jié)。輸出量PWM占空比增量Δδ的模糊化,要充分考慮到電動(dòng)機(jī)轉(zhuǎn)速響應(yīng)的暫態(tài)和穩(wěn)態(tài)指標(biāo)的協(xié)調(diào)。為了使轉(zhuǎn)速偏差較大時(shí)電機(jī)能快速響應(yīng),而在轉(zhuǎn)速偏差較小時(shí)又不至于產(chǎn)生較大的超調(diào)量,輸出變量Δδ的模糊化采取兩種方案,一種方案的模糊化定義5個(gè)模糊集,相應(yīng)語言變量為負(fù)大(NB)、負(fù)小(NS)、零(Z)、正小(PS)和正大(PB),其隸屬度函數(shù)分布如圖4(a)所示;另一種方案的隸屬度函數(shù)采用單線形。兩種方案由模糊控制器根據(jù)轉(zhuǎn)速偏差量的大小進(jìn)行自動(dòng)切換。解模糊化(defuzzification)采用加權(quán)平均的重心法。
參數(shù)自調(diào)整原則
圖2所示的參數(shù)自調(diào)整模糊控制器可以提高模糊控制系統(tǒng)的動(dòng)、穩(wěn)態(tài)性能。量化因子Ke和Kec及比例因子Ku對(duì)模糊系統(tǒng)的穩(wěn)態(tài)特性和動(dòng)態(tài)特性均有較大的影響。一般來說,Ke和Kec越大,系統(tǒng)的控制精度越高,但大偏差范圍分辯率相應(yīng)提高,可能導(dǎo)致系統(tǒng)超調(diào),調(diào)節(jié)時(shí)間增加,動(dòng)態(tài)特性變差。增大Ku可以提高系統(tǒng)的控制精度和響應(yīng)速度,減少Ku能減少超調(diào),提高系統(tǒng)穩(wěn)定度。因此,參數(shù)自調(diào)整的一般原則為:當(dāng)偏差或偏差變化率較大時(shí),Ke和Kec取較小值,Ku取較大值,這樣可以保證系統(tǒng)的快速性和穩(wěn)定性;當(dāng)偏差或偏差變化率較小時(shí),Ke和Kec取較大值,Ku減小,這樣可以避免產(chǎn)生超調(diào),并使系統(tǒng)盡快進(jìn)入穩(wěn)態(tài)精度范圍。
控制軟件
控制系統(tǒng)軟件的主程序流程圖如圖5所示 。模糊控制器的初始化實(shí)際上是取出以表格形式存放在程序存儲(chǔ)器的模糊控制規(guī)則,以初始的比例因子進(jìn)行模糊判決后,將得出的控制數(shù)值以表格形式存放在RAM中,使用時(shí)可通過一個(gè)查表子程序直接提取,以滿足實(shí)時(shí)控制系統(tǒng)的快速要求。若運(yùn)行中比例因子自調(diào)整,只需要做簡(jiǎn)單的計(jì)算可獲得新值;同時(shí),還可以在不改變程序的情況下,將控制系統(tǒng)應(yīng)用于不同參數(shù)的直流電動(dòng)機(jī)。
實(shí)驗(yàn)
取直流電動(dòng)機(jī)系統(tǒng)的模型為:
式中,K為放大系數(shù),Tm為機(jī)電時(shí)間常數(shù),Tu為小時(shí)間常數(shù)之和。
采用MATLAB進(jìn)行仿真實(shí)驗(yàn),具體仿真方法見文獻(xiàn)[4]。仿真時(shí)所有的變量進(jìn)行了歸一化,仿真結(jié)果如圖5所示。圖5(a)和圖5(b)為Tm=0.4和Tu=0.02時(shí)模糊參數(shù)自調(diào)整和參數(shù)固定的兩種仿真結(jié)果,圖5(c)為系統(tǒng)參數(shù)變化為Tm=0.5和Tu=0.02時(shí)模糊參數(shù)自調(diào)整的仿真結(jié)果。由仿真結(jié)果可知,該模糊參數(shù)自調(diào)整直流電動(dòng)機(jī)控制系統(tǒng)具有調(diào)節(jié)速度快、動(dòng)態(tài)性能好、超調(diào)小、控制精度較高的特點(diǎn);同時(shí),在系統(tǒng)參數(shù)發(fā)生較大變化時(shí)系統(tǒng)的動(dòng)、穩(wěn)態(tài)特性變化不大,說明具有良好的魯棒性。
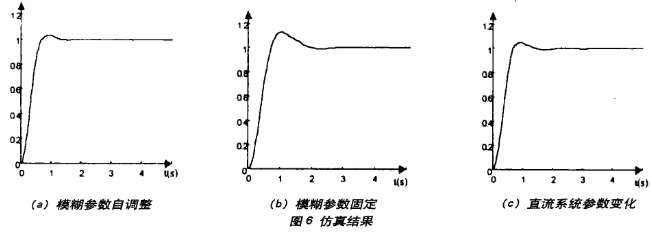
實(shí)驗(yàn)室試運(yùn)行也表明該控制系統(tǒng)具有良好的控制性能。
結(jié)語
將高性能、高集成度并提供PWM信號(hào)的單片微處理器PIC16C63應(yīng)用于中小功率的直流無刷電機(jī)調(diào)速系統(tǒng),具有系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、成本低廉和高可靠性等優(yōu)點(diǎn),在結(jié)合采用參數(shù)自調(diào)整的模糊控制技術(shù),使系統(tǒng)具有較高控制精度、良好的動(dòng)態(tài)特性和魯棒性,使設(shè)計(jì)也變得較為簡(jiǎn)單。該系統(tǒng)直接使用220V市電,其調(diào)速方案稍加改進(jìn)和工藝化,便可以在許多現(xiàn)代化家用電器中廣泛應(yīng)用;如果將電機(jī)換成交流驅(qū)動(dòng)的通用電機(jī),并配以雙向可控硅控制電路,則該方案的應(yīng)用前景將更為廣闊。
責(zé)任編輯:gt
-
顯示器
+關(guān)注
關(guān)注
21文章
4970瀏覽量
139927 -
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177812 -
微處理器
+關(guān)注
關(guān)注
11文章
2258瀏覽量
82405
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一種新型的電梯門機(jī)控制系統(tǒng)
基于DSP的交流異步電機(jī)高精度調(diào)速系統(tǒng)設(shè)計(jì)
電機(jī)調(diào)速程序c語言與步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語言程序及說明
復(fù)合模糊控制器在電機(jī)調(diào)速系統(tǒng)中的應(yīng)用
調(diào)速型液力偶合器調(diào)速模糊控制系統(tǒng)
采用模糊控制的直流電機(jī)軟啟動(dòng)及調(diào)速系統(tǒng)
基于PIC16F877的電磁調(diào)速器控制系統(tǒng)
基于80C196KC的直流電機(jī)PWM調(diào)速控制器的設(shè)計(jì)與應(yīng)用
模糊PID控制的異步電機(jī)矢量調(diào)速系統(tǒng)仿真
直流調(diào)速系統(tǒng)的模糊PID控制器設(shè)計(jì)實(shí)現(xiàn)
基于DSP的開關(guān)磁阻電機(jī)調(diào)速系統(tǒng)的模糊控制
基于AVR單片機(jī)實(shí)現(xiàn)的直流電機(jī)PWM調(diào)速控制器
調(diào)速電機(jī)控制器 調(diào)速電機(jī)控制器工作原理
直流調(diào)速系統(tǒng)模糊控制的DSP實(shí)現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論