 基于89C52單片機和16C554收發器實現擴展通信接口的設計
基于89C52單片機和16C554收發器實現擴展通信接口的設計
引言
在交通路口的紅綠燈控制系統中,需要將各器口車流量、車速等狀態信息時傳到主控室,另外,上位主機隨時可能下發各種道路控制信息。這種遠距離通信常通過 MODEM以點對點的方式進行。常用MODEM通信鏈路的連接方式有兩種。第一種是通過電話以撥號方式完成通信鏈接。采用這種方式,上位主機與各路口機的距離可無限遠,但缺點是每個路口占用1個電話號。由于主機與路口機的通信是頻繁的,若不采用專線電話,則難以保證信息收發的實時性;而采用專線連接,勢必增加系統成本和設備開銷。另一種連接是直接通過調制電纜連接兩臺MODEM,即背靠背連接。背靠背的連接在數據傳輸波特率為9600 baud時,通信距離可以達到10 km,完全能夠滿足中小城市道路控制系統中的通信要求。本系統采用了后一種連接方式。
1、系統硬件設計
系統由兩大部分組成:插在計算機中的上位主機和各路口的下位機。根據通信鏈路的連接方式,89C52為核心組成的上位主機需要通過多臺MODEM實現與各路口機的數據傳輸。系統選用了EXAR公司的UART(通用異步收發器)16C554來擴展單片機異步通信接口。1片16C554可以完成對4臺MODEM的操作。下位路口機也是由89C52組成,對MODEM的操作通過其自身UART及部分P1口線實現。圖1為系統結構框圖。
1.1 MODEM鏈路的連接
系統采用背靠背連接方式,只要用調制電纜直接連接對應MODEM的Line口就實現了鏈路的連接。
1.2 上位主機電路組成
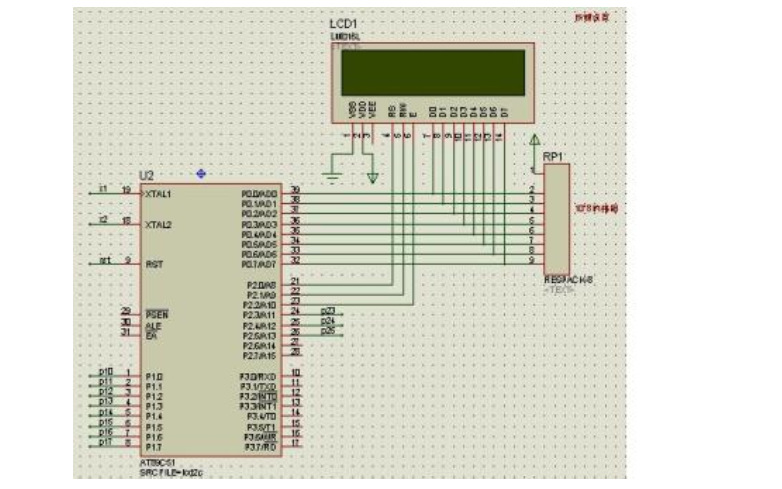
上位機主要完成兩部分工作。一是與計算機交換數據,將車輛檢測數據及當前各路口紅綠燈狀態等信息送計算機顯示,同時接收計算機下發的控制數據。這部分任務通過ISA總線完成,在這里不作敘述。二是控制MODEM與路口機鏈接,完成數據的收發。對MODEM的操作由單片機對16C554編程實現。圖2是上位主機的原理圖。其中62256用于暫存所有路口的收發數據;16C554用于擴展單片機的異步通信接口,實現對4路MODEM的控制;MAX238完成 TTL電平至RS-232的電平轉換;GAL20V8實現擴展外設的譯碼。
16C554 是內部帶有16字節收發FIFO的通用異步收發器,具有獨立的收發控制電路。4路標準的MODEM接口,通過軟件可分別設置允許每一路中斷。波特率、數據幀格式等也都可由軟件編程設置。該芯片可工作在24MHz或14.7464MHz,當時鐘頻率為24MHz時,數據傳輸率可達1.5Mbps;時鐘頻率為 14.746 4MHz時,數據傳輸率達912.6Kbps,完全可以用于高速MODEM的控制中。
1.3 路口機電路組成
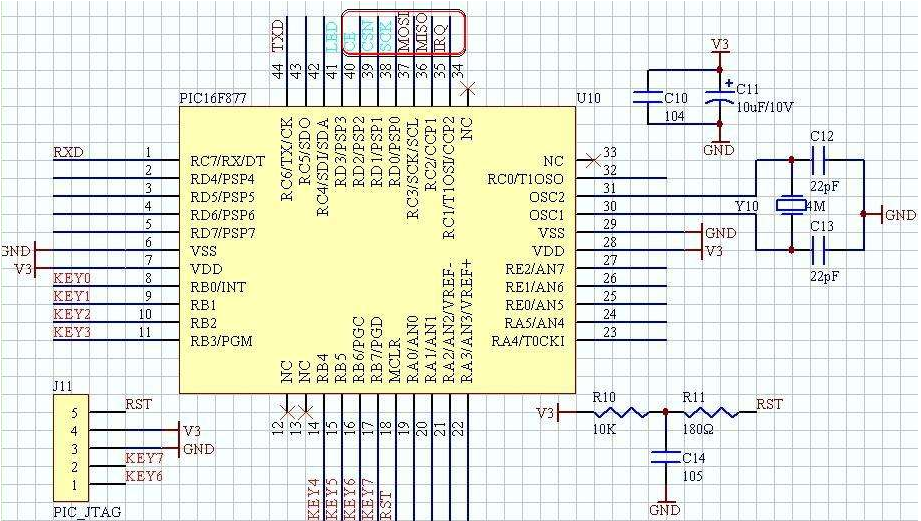
以89C52為核心的單片機系統實現了路口機的全部功能:與上位機的通信及車輛信息的處理。系統擴展了1片6264,現MODEM的通信接口由89C52內部的UART及P1口實現。圖3給出了通信接口的電路原理圖。
RS-232標準定義的接口有兩種形式:25針和9針。這里采用了9針連接器。當MODEM工作于全雙工方式時,不需要使用RTS/CTS握手信號。另外,背靠背的連接MODEM沒有接電話機,故無需檢測振鈴信號RI。這樣,9根線中只有連接6根線。
89C52單片機內部有1個全雙工的UART,但沒有對MODEM的控制接口。對MDOEM的控制由P1口實現,它們分別為載波檢測DCD、數據設備就緒DSR、數據終端就緒DTR,這樣共同實現MODEM的鏈接和數據的收發。
2、系統軟件設計
2.1 通信線路的鏈接與掉線的處理
采用背靠背連接方式,首先要解決通信的鏈接問題。由于無振鈴信號觸發自動應答,因此被動一方的MODEM應在開機工作過程中定時地云檢測裁波信號。如果鏈路未通,則采用應答方式摘機,直至鏈接成功。主動方、被動方MDOEM的通信鏈接過程如圖4所示。[page]
根據系統要求,上位主機應能隨時發送命令或接收數據,這樣與上位機連接的MODEM定為主動方。由于上位機與下位機的摘機是異步的,因此,上位機MDOEM 等待載波建立時間要大于下位機MODEM等待載波的建立時間。這里上、下位機等待載波建立時間分別設為2.5min和50s。若上位機定時器的定時時間到而未建立鏈接,則被視為通信有問題,通過計算機反映出鏈接失敗,同時下位機定時摘機時間可設為1min,這樣才能保證線路由于掛機或非正常掉線后能再次接通鏈路。
2.2 16C554的初始化
16C554集成有全部的MODEM控制邏輯,通過對其內部的13個寄存器的讀寫,就可以完成對標準MODEM的操作。
系統上電后需先對16C554進行初始化,包括設置波特率及傳輸數據的幀格式、設置中斷允許位、對FIFO的控制設置等。
INIMODEM:
MOV DPTR,#0F803H ;DPTR指向線控寄
;存器LCR
MOV A,#80H ;設置波特率
MOVX @DPTR,A
ANL DPL,#0F8H
MOV A,#0CH
MOVX @DPTR,A ;送波特率常數:9600baud
INC DPL
CLR A
MOVX @DPTR,A
INC DPL
INC DPL ;DPTR指向線控寄存器LCR
MOV A,#03H
MOVX @DPTR,A ;設置數據幀格式
INC DPL ;指向MODEM控制寄存器
MOV A,#01H
MOVX @DPTR,A ;置設備終端準備就緒
ANL DPL,#0F8H
ORL DPL,#02H ;指向MODEM控制寄存器
;MCR
MOV A,#03H ;置FIFO有效,清接收FIFO
ANL DPL,#0F08H
ORL DPL,#01H ;DPTR指向中斷允許寄存器
;IER
MOV A,#01H
MOVX @DPTR,A;設置接收寄存器中有數則
;中斷
RET
3、結束語
以背靠背方式連接的通信網絡,由于無需任何電話資源,對10km以內的通信連接,不失為較好的選擇。在實際應用中,為保證數據傳輸的實時性,系統在上電初始化后,即可以對線路進行鏈接。正常情況下線路應處于鏈接狀態,這樣才能保證上位機對下位機的及時控制,避免線路重新鏈接帶的延遲。該系統已成功用于交通路口聯網控制。
責任編輯:gt
-
單片機
+關注
關注
6039文章
44575瀏覽量
636342 -
收發器
+關注
關注
10文章
3437瀏覽量
106060 -
計算機
+關注
關注
19文章
7518瀏覽量
88188
發布評論請先 登錄
相關推薦
利用16C554實現主從式單片機遠距離通信擴展
基于89C52的GPS板電路設計與實現
89C52單片機模塊

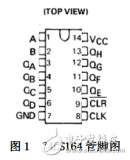
74LS164的管腳定義與89C52單片機秒表的設計
89C52單片機和nRF24L01無線收發器芯片應用的收發程序免費下載
使用89C52單片機實現DHT11的應用和LCD1602顯示的程序免費下載






 工商網監
工商網監
評論