") 基于CAN總線技術(shù)實現(xiàn)熱網(wǎng)監(jiān)控控制和通信系統(tǒng)的設(shè)計
基于CAN總線技術(shù)實現(xiàn)熱網(wǎng)監(jiān)控控制和通信系統(tǒng)的設(shè)計
引言
目前我國北方許多城市已經(jīng)或者即將進行熱網(wǎng)改造工程,將傳統(tǒng)的分散供熱改造為集中供熱。
由于CAN總線相比其它現(xiàn)場總線技術(shù)具有眾多優(yōu)點,因此在工業(yè)中的應(yīng)用越來越廣泛。本文基于該總線技術(shù)針對熱網(wǎng)監(jiān)控系統(tǒng)開發(fā)的現(xiàn)場控制和通信的子系統(tǒng),能安全可靠地實現(xiàn)現(xiàn)場數(shù)據(jù)采集、閉環(huán)控制及數(shù)據(jù)傳輸。鑒于篇幅,本文重點介紹CAN網(wǎng)絡(luò)通信部分的設(shè)計與實現(xiàn)。
系統(tǒng)結(jié)構(gòu)及其硬件構(gòu)成
系統(tǒng)結(jié)構(gòu)
熱網(wǎng)監(jiān)控系統(tǒng)主要由上位機和現(xiàn)場控制器組成,總體結(jié)構(gòu)如圖1所示。
熱網(wǎng)監(jiān)控系統(tǒng)是在一次設(shè)備(傳感器、變送器、各種執(zhí)行機構(gòu))的基礎(chǔ)上完成對熱網(wǎng)的監(jiān)測與控制,通過調(diào)節(jié)熱管網(wǎng)的供水流量、供水溫度、供水壓力,來保證熱網(wǎng)安全、可靠、高效、穩(wěn)定的運行。根據(jù)上述要求,本系統(tǒng)在保證系統(tǒng)可靠工作和降低成本的條件下,考慮到通用性、實時性和可擴展性等方面的因素,采用了主要由上位計算機系統(tǒng)和現(xiàn)場控制器構(gòu)成的系統(tǒng)結(jié)構(gòu)。
系統(tǒng)工作過程如下:上位機首先初始化CAN網(wǎng)卡,設(shè)置網(wǎng)卡工作模式、接收碼、接收掩碼和波特率,然后進入運行狀態(tài),在適當(dāng)條件下與現(xiàn)場控制器進行通信。現(xiàn)場控制器主要完成現(xiàn)場數(shù)據(jù)的采集與處理和現(xiàn)場設(shè)備的控制等功能,并以查詢或中斷方式與主機進行通信。
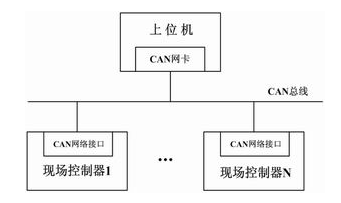
圖1 熱網(wǎng)監(jiān)控系統(tǒng)總體結(jié)構(gòu)
硬件系統(tǒng)
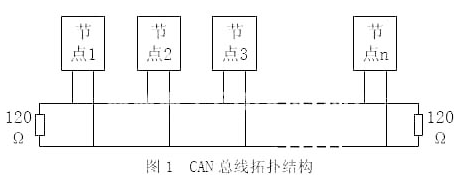
CAN網(wǎng)絡(luò)的拓撲結(jié)構(gòu)采用總線式結(jié)構(gòu),其結(jié)構(gòu)簡單、成本低、系統(tǒng)可靠性高。信息的傳輸采用CAN通信協(xié)議,通信介質(zhì)采用雙絞線。

圖2 現(xiàn)場控制器的結(jié)構(gòu)框圖
上位機
上位機采用工控機,負責(zé)對整個系統(tǒng)進行管理。上位機通過CAN網(wǎng)卡與現(xiàn)場控制器通信,同時通過局域網(wǎng)或者公共電話交換網(wǎng)與整個工廠或者公司的計算機信息網(wǎng)絡(luò)進行連接,實現(xiàn)信息共享。上位機具有組態(tài)、數(shù)據(jù)采集、參數(shù)設(shè)置、遠程控制、流程顯示、數(shù)據(jù)存儲、趨勢顯示、報表打印以及通信等功能。
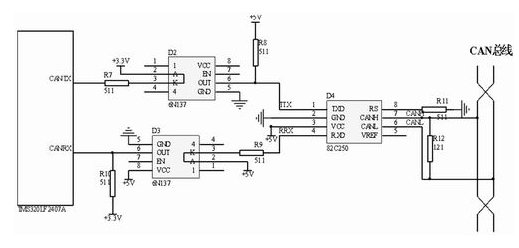
圖3 CAN網(wǎng)絡(luò)通信接口單元電路
CAN網(wǎng)卡
CAN網(wǎng)卡是負責(zé)CAN總線與上位機之間數(shù)據(jù)交換的功能模塊。CAN網(wǎng)卡上存在兩個方向的數(shù)據(jù)交換:CAN網(wǎng)卡與上位機之間的數(shù)據(jù)交換(通過雙端口RAM實現(xiàn))以及CAN網(wǎng)卡與CAN總線之間的數(shù)據(jù)交換(由微處理器通過訪問CAN控制器的接收緩沖區(qū)以及發(fā)送緩沖區(qū)來實現(xiàn))。CAN網(wǎng)卡上的CAN控制器選用的是PHILIPS公司的SJA1000芯片。
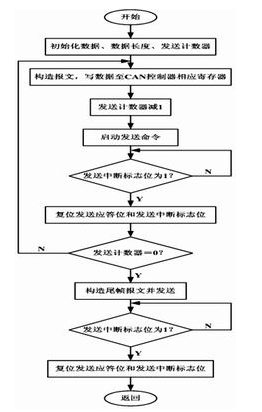
圖4 通用定時器周期中斷服務(wù)程序
現(xiàn)場控制器
現(xiàn)場控制器的結(jié)構(gòu)框圖如圖2所示。
該現(xiàn)場控制器具有14路模擬量輸入端口、2路模擬量輸出端口、4路開關(guān)量輸入端口、4路開關(guān)量輸出端口以及時鐘接口、數(shù)據(jù)存儲接口、液晶顯示接口、網(wǎng)絡(luò)通信接口、報警輸出接口等。本系統(tǒng)采用了TI公司的帶有10位ADC和CAN控制器的DSP芯片TMS320LF2407A作為CPU。
網(wǎng)絡(luò)通信接口單元是用來對CAN總線進行讀寫訪問的部分控制電路。當(dāng)需要發(fā)送數(shù)據(jù)時,CPU將數(shù)據(jù)交給網(wǎng)絡(luò)接口單元電路,由網(wǎng)絡(luò)接口單元電路進行數(shù)據(jù)格式轉(zhuǎn)換、串并轉(zhuǎn)換和信號形式轉(zhuǎn)換,并將數(shù)據(jù)按照CAN協(xié)議信號形式發(fā)送到CAN總線上。當(dāng)CAN總線上有數(shù)據(jù)時,它負責(zé)從CAN總線上讀取數(shù)據(jù)。首先通過幀過濾功能判斷是否接收此幀,若接收,則通過與發(fā)送相反的過程,將數(shù)據(jù)交給CPU。

表1 標識符分配方案
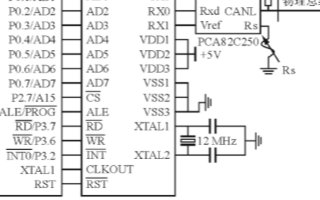
網(wǎng)絡(luò)通信接口單元主要由TMS320LF2407A片內(nèi)的CAN控制器及CAN收發(fā)器PCA82C250組成。CAN控制器負責(zé)對數(shù)據(jù)的格式進行轉(zhuǎn)換,承擔(dān)網(wǎng)絡(luò)通訊的控制任務(wù)。CAN收發(fā)器PCA82C250是CAN控制器和物理總線間的接口,負責(zé)信號的電平及形式轉(zhuǎn)換,可以提供對總線的差動發(fā)送能力和對CAN控制器的差動接收能力。為防止CAN總線上的干擾進入板卡,本系統(tǒng)采用光電隔離器件6N137來實現(xiàn)收發(fā)雙向隔離。網(wǎng)絡(luò)通信接口單元具體電路如圖3所示。
CAN通信軟件設(shè)計與實現(xiàn)
CAN遵從OSI模型,按照OSI基準模型,CAN結(jié)構(gòu)劃分為兩層:數(shù)據(jù)鏈路層和物理層。然而,在實際應(yīng)用中,即使只是實現(xiàn)簡單的基于CAN的分布式系統(tǒng),僅有物理層和數(shù)據(jù)鏈路層也是遠遠不夠的。比如對于傳輸長度超過8個字節(jié)的數(shù)據(jù)塊、帶有握手協(xié)議的數(shù)據(jù)傳輸過程、標識符分配以及通過網(wǎng)絡(luò)管理節(jié)點等功能就不能實現(xiàn)。
因此需要在這兩層之外附加一層來支持應(yīng)用過程,即應(yīng)用層。這一層功能對應(yīng)OSI基準模型中的上五層,主要完成網(wǎng)絡(luò)層和傳輸層的工作,提供接口,使得通信模塊和具體應(yīng)用模塊分離。針對熱網(wǎng)監(jiān)控系統(tǒng),應(yīng)用層協(xié)議需要通信雙方具體協(xié)商制定。
CAN通信應(yīng)用層協(xié)議
現(xiàn)場控制器軟件設(shè)計中與上位機的通信是最關(guān)鍵的部分之一。針對熱網(wǎng)監(jiān)控系統(tǒng),使用現(xiàn)場總線CAN網(wǎng)絡(luò)技術(shù),制定了CAN應(yīng)用層協(xié)議。應(yīng)用層完成的主要工作有:標識符分配、多報文數(shù)據(jù)包的處理、報文發(fā)送與接收等。
標識符分配方案
TMS320LF2407A支持CAN 2.0B協(xié)議,本系統(tǒng)通信的信息幀采用擴展幀,具有29位標識符,標識符分配方案如表1所示。
其中,DIR表示方向。DIR=0時,表示主站向從站發(fā)送數(shù)據(jù);DIR=1時,表示從站向主站發(fā)送數(shù)據(jù)。TYPE為報文幀類型。當(dāng)TYPE.2=0時,表示點對點發(fā)送;當(dāng)TYPE.2=l時,表示廣播發(fā)送。當(dāng)TYPE~TYPE.0Xb時,表示單幀報文;TYPE.1~TYPE.0=11b時,表示非結(jié)束多幀報文;TYPE.1~TYPE.0=10b時,表示結(jié)束多幀報文。另外還有目標地址和源地址各七位,命令符八位。命令符是用來標識上位機對現(xiàn)場控制器的控制命令,或現(xiàn)場控制器對上位機的上傳命令。
報文的處理
本設(shè)計對CAN通信中的報文處理做了以下規(guī)定:
單報文:單報文由標識符中的數(shù)據(jù)類型TYPE.1決定,當(dāng)其為0時表示為單報文,此時待傳送的數(shù)據(jù)不超過8個字節(jié),數(shù)據(jù)段中為實際傳送的數(shù)據(jù)。
多報文的首幀和中間幀:多報文的首幀和中間幀由TYPE.1~TYPE.0決定,當(dāng)其為11b時表示為非結(jié)束多報文,即為多報文的首幀和中間幀,此時待傳送的數(shù)據(jù)超過8個字節(jié),數(shù)據(jù)段中第1個字節(jié)為索引項,后7個字節(jié)為傳送的數(shù)據(jù)。
多報文的尾幀:多報文的尾幀由TYPE.1~TYPE.0決定,當(dāng)其為10b時表示為結(jié)束多報文,即為多報文的尾幀,此時規(guī)定該幀中數(shù)據(jù)長度為2個字節(jié),數(shù)據(jù)段中第1個字節(jié)為索引項,第2個字節(jié)為待傳送數(shù)據(jù)的總長度,單位為字節(jié)。
CAN通信初始化
CAN通信初始化主要是設(shè)置CAN的通信參數(shù),包括配置位定時器和初始化郵箱兩部分。需要初始化的寄存器有:位配置寄存器2、位配置寄存器1、標識符寄存器、控制寄存器、局部屏蔽寄存器等。需要注意的是,只有當(dāng)全局狀態(tài)寄存器中的改變配置使能位為高時,才能配置位定時器;當(dāng)主控制器中的改變配置請求位為1,即CAN控制器處于復(fù)位工作方式時,才能配置標識符寄存器、控制寄存器和數(shù)據(jù)域。在訪問位配置寄存器時,由于其內(nèi)容決定波特率的數(shù)值,位配置寄存器的初始化字必須依據(jù)系統(tǒng)中各CAN控制器的晶振頻率而設(shè)定。
數(shù)據(jù)發(fā)送
信息從CAN控制器發(fā)送到CAN總線是由CAN控制器自動完成的。發(fā)送程序只需把要發(fā)送的信息幀送到相關(guān)的CAN寄存器,啟動發(fā)送命令即可。數(shù)據(jù)發(fā)送采用通用定時器周期中斷,定時發(fā)送已采集的數(shù)據(jù)到上位機,實現(xiàn)數(shù)據(jù)的存儲,以便用戶查詢。由于采集到的數(shù)據(jù)超過8個字節(jié),所以需對數(shù)據(jù)包進行分片構(gòu)造報文。通用定時器周期中斷服務(wù)程序如圖4所示。
數(shù)據(jù)接收
信息從CAN總線到CAN接收郵箱是由CAN控制器自動完成的,數(shù)據(jù)接收采用郵箱中斷。在中斷服務(wù)程序中讀取接收到的數(shù)據(jù),對接收到的數(shù)據(jù)進行解碼,并置位相應(yīng)標志位。在主程序循環(huán)中查詢標志位,當(dāng)檢測到標志位被置位時,則進入相應(yīng)處理程序,同時對標志位清零。
結(jié)語
應(yīng)用層協(xié)議是CAN網(wǎng)絡(luò)應(yīng)用的關(guān)鍵,因此該系統(tǒng)中的重點工作是在現(xiàn)場控制器與上位機之間的通信中,使用現(xiàn)場總線CAN網(wǎng)絡(luò)技術(shù),制定了用戶層通信協(xié)議。而且本系統(tǒng)已經(jīng)完成了在實驗室階段的調(diào)試工作,通信部分能夠正常工作。本文介紹的CAN 通信設(shè)計具有很強的通用性,其成果可以應(yīng)用在很多數(shù)據(jù)采集的場合。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
112文章
16332瀏覽量
177808 -
計算機
+關(guān)注
關(guān)注
19文章
7488瀏覽量
87849 -
總線
+關(guān)注
關(guān)注
10文章
2878瀏覽量
88051
發(fā)布評論請先 登錄
相關(guān)推薦
基于FPGA的CAN總線通信系統(tǒng)
汽車電子與CAN總線-汽車車身網(wǎng)絡(luò)系統(tǒng)
什么是CAN總線 CAN總線有什么作用
基于STM32和CAN總線的溫度監(jiān)控系統(tǒng)的設(shè)計
基于CAN 總線的分布式潛水電機監(jiān)控系統(tǒng)
基于CAN總線的網(wǎng)絡(luò)監(jiān)控系統(tǒng)
基于CAN總線的客房通信控制器的設(shè)計
基于CAN總線的監(jiān)控系統(tǒng)設(shè)計
基于CAN總線的變頻設(shè)備遠程監(jiān)控系統(tǒng)的實現(xiàn)
采用CAN總線控制器SJA1000實現(xiàn)控制電路接口的設(shè)計
基于單片機和CAN控制器sja1000實現(xiàn)分布式監(jiān)控系統(tǒng)設(shè)計

利用CAN總線實現(xiàn)煤礦安全監(jiān)控傳輸系統(tǒng)的設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論