

傳統的旋轉熱管溫度采集系統一般采用電刷傳遞溫度傳感器信號,這種接觸式信號傳導方式不僅導致使用壽命短,而且不可避免地存在信號干擾,難以獲得準確的溫度值,已不能滿足日益提高的工業要求。
目前,ARM內核微控制器發展迅速,其處理器性能高、耗電少、成本低,具備16/32位雙指令集,可擴展性能強。而在工業檢測系統應用中,作為一種主要的測溫元件,熱電偶以其結構簡單、制造容易、使用方便、測溫范圍寬、測溫精度高等特點,廣泛應用于工業測溫領域中。綜上所述,本文將Cortex—M4內核的低功耗ARM芯片TM4C123GH6PM和多個K型熱電偶結合,組成了溫度采集結點,并通過無線串口通信模塊實現了其與上位機的遠程通信,從而有效避免了干擾信號,實現了對旋轉熱管的多點溫度遙測功能。
1 系統構成及工作原理
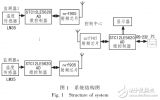
旋轉熱管溫度遙測系統結構框圖如圖1所示,其主要由ARM核心模塊、電源模塊、片選模塊、驅動模塊、熱電偶測溫、無線串口通信模塊及監測計算機組成。整個系統由3.7 V/1000mAh鋰電池電源模塊供電,續航時間長,并且可以方便地對電池進行充電。
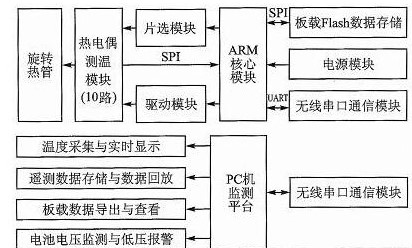
ARM核心模塊即為TM4C123GH6PM的最小系統,其通過片選模塊依次選擇需要工作的熱電偶結點,熱電偶測溫模塊對旋轉熱管完成溫度采集工作后,通過SPI總線將溫度數字量傳輸給TM4C123GH6PM。由于系統包含10路熱電偶測溫模塊,在其與ARM核心模塊之間添加了總線收發器74HC245驅動模塊,以提高端口的驅動能力。在收到溫度數據后,TM4C123 GH6PM通過無線串口通信模塊將溫度值發送給遠程計算機,運行于PC機上的監測平臺對溫度進行實時顯示,并進行數據存儲與回放、電池電壓監測與低壓報警等功能。同時,為了防止無線傳輸過程中數據出現丟包等情況,系統還具有板載Flash的數據存儲功能,在進行溫度無線傳輸的同時,ARM核心模塊通過SPI口將數據存入Flash芯片中,待實驗完成后,通過PC機檢測平臺可將板載數據導出,方便與遙測數據對比。
2 系統硬件設計
2.1 熱電偶測溫電路
雖然K型熱電偶具備諸多優點,但其輸出電勢極其微弱,而且存在冷端溫度誤差和輸出電勢與被測溫度的非線性問題,易引起較大測量誤差,因此需要對熱電偶輸出信號進行處理。系統的測溫電路如圖2所示,采用了Maxim公司的K型熱電偶串行A/D轉換器MAX6675芯片,該型號芯片能夠獨立完成信號放大、冷端補償、線性化、A/D轉換及SPI串口數字化輸出功能,可將溫度信號轉換成12位的數字量,溫度分辨率達0.25℃,且芯片內部含有熱電偶斷線檢測電路。其冷端補償溫度范圍為-20~80℃,應用的環境溫度范圍比較寬,可以測量0~1023.75℃的被測溫度,基本符合旋轉熱管溫度測量的實際需求。
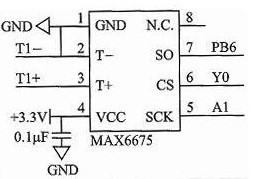
MAX6675的2、3引腳與K型熱電偶的負極和正極連接,6引腳則與74HC154譯碼器的輸出端相連接,同時,5引腳時鐘SCK則與驅動芯片74HC245相連接。
2.2 Flash存儲電路
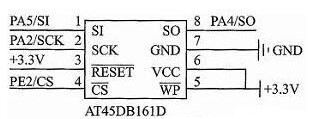
為了保證所采集的溫度數據的完整性,本系統提供了板載Flash用以存儲數據,具體電路如圖3所示。這里采用了SPI總線接口的閃存芯片AT45DB161D,速度可達66 MHz,存儲空間包含4 096頁,每頁包含512或528個字節。與并行Flash存儲器不同,它采用Rapids串行接口,從而大大減少了可用引腳數量,同時也提高了系統可靠性,降低了開關噪聲,縮小了封裝體積,滿足本系統低電壓、低功耗與小體積的要求。
2.3 無線串口通信模塊
無線串口通信模塊采用的是成都億佰特電子科技有限公司的工業級無線數傳收發模塊E14~TTL。該模塊中心頻率為2.4 GHz,最大功率達到100mW,傳輸距離可達2 100 m,具有TTL電平的串口通信接口,支持1200~115 200bps多種波特率,模塊實物圖如圖4所示。本系統權衡傳輸速度與傳輸精度,選擇波特率為9 600bps,實現了測溫節點與計算機的高可靠性串行無線通信。
3 軟件設計
3.1 下位機軟件設計
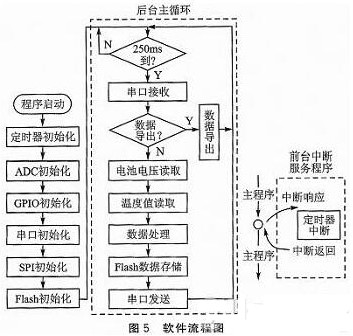
系統的下位機軟件采用前后臺運行機制,軟件流程圖如圖5所示。由于MAX6675的測溫步長為190 ms,為了保證溫度數據讀取的可靠性,本軟件設置定時時間為250 ms,在前臺定時器中斷服務程序中完成標志位置位。后臺主循環程序通過串口接收上位機數據導出指令,若不導出,則程序通過A/D轉換器進行電池電壓讀取,并依次讀取多路溫度結點的輸出值,經過數據處理后,將數據存儲于板載Flash中。同時,利用串口將所得數據發送至上位機,若收到導出指令,則程序執行板載Flash數據導出操作。
3.2 上位機軟件設計
為了提高開發效率,上位機監控軟件采用圖形化編程語言LabVIEW進行設計。LabVIEW提供了一個簡潔直觀的圖形化編程環境,可以輕松搭建友好美觀的操作界面,無需編寫繁瑣的計算機程序代碼,大大簡化了程序設計。
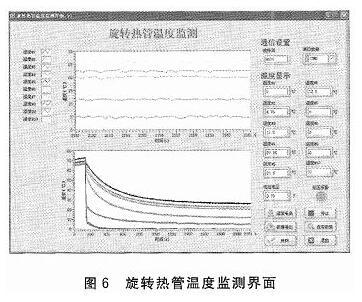
旋轉熱管溫度監測界面(正在進行溫度采集)如圖6所示,軟件設計采用模塊化思想,其主要由通信設置、溫度顯示、電池低壓報警及操作臺等模塊組成。用戶可以方便地在界面上進行溫度采集、數據導出及查看數據等功能,極大地提高了工作效率。
4 實驗結果和分析
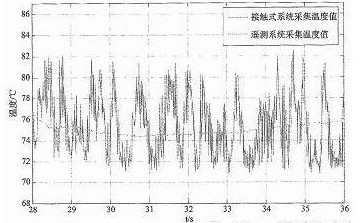
實驗采用傳統接觸式系統和本文設計的遙測系統對旋轉熱管相同區域同時進行溫度采集,旋轉熱管固定轉速為100 r/min,實驗結果曲線如圖7所示。從圖中可以看出,接觸式溫度采集系統在旋轉狀態下采集的溫度信號存在很大的干擾,穩態溫度波動量達到了11.65℃,而本系統所采集的溫度基本無明顯毛刺,穩態溫度波動量僅為2.45℃,與真實溫度情況相符,滿足旋轉熱管溫度采集的精確性和可靠性的要求。
結語
旋轉熱管溫度遙測系統以TM4C123GH6PM為主控芯片,通過SPI接口連接MAX6675,不斷采集K型熱電偶輸出的信號,并通過無線串口通信模塊將溫度值發送給上位機。基于Lab VIEW平臺開發的上位機監測界面易于操作,實現了溫度數據的顯示、存儲和回放等多個功能。實驗結果表明:相比于傳統接觸式溫度采集系統,本系統有效避免了信號干擾,并具備成本低、操作方便和擴展性好等諸多優點,為旋轉熱管溫度精確采集提供了一種行之有效的解決方案。
-
微控制器
+關注
關注
48文章
7880瀏覽量
153526 -
芯片
+關注
關注
459文章
52013瀏覽量
434530 -
溫度傳感器
+關注
關注
48文章
3016瀏覽量
157745
發布評論請先 登錄
溫度遙控遙測系統設計與PID實現

基于ARM平臺及短消息的多點溫度監測系統設計

基于ARM室內溫度控制系統的設計與實現

基于無線傳輸的多點溫度采集系統設計與實驗


基于nRF905的多點溫度采集系統的設計與實現





 工商網監
工商網監

評論