

1 、引言
隨著科學(xué)技術(shù)的發(fā)展、人類社會(huì)不斷進(jìn)步,人們的生活質(zhì)量不斷提高,人們對(duì)生活環(huán)境的要求也日漸增長(zhǎng),因此智能建筑應(yīng)運(yùn)而生。建筑設(shè)備自動(dòng)化系統(tǒng)是智能建筑的一個(gè)重要組成部分,它負(fù)責(zé)對(duì)大廈內(nèi)的各種機(jī)電設(shè)施進(jìn)行全面的計(jì)算機(jī)監(jiān)控管理,包括中央空調(diào)、給排水、變配電、照明、電梯、消防、安全防范等系統(tǒng)的監(jiān)控。而中央空調(diào)的能耗占整個(gè)建筑能耗的50%-60%,是系統(tǒng)節(jié)能的重點(diǎn)。但是,由于中央空調(diào)系統(tǒng)龐大,反應(yīng)速度較慢,滯后現(xiàn)象嚴(yán)重,給機(jī)組運(yùn)行的穩(wěn)定性增加了困難。目前為止,中央空調(diào)的控制系統(tǒng)幾乎仍然采用傳統(tǒng)的控制技術(shù),如比例積分微分(PID)調(diào)節(jié),由于PID的控制參數(shù)往往通過工程師的經(jīng)驗(yàn)預(yù)先設(shè)定或通過試驗(yàn)來確定,對(duì)于工況變化的適應(yīng)性差,控制慣性較大,節(jié)能效果不理想,特別是大區(qū)域中央空調(diào)系統(tǒng)的協(xié)調(diào)控制問題,用傳統(tǒng)控制技術(shù)是難以解決問題的。以下結(jié)合某企業(yè)的技術(shù)改造工程對(duì)大區(qū)域空調(diào)系統(tǒng)溫、濕度控制問題從技術(shù)層面作簡(jiǎn)要探討。
2 、大區(qū)域空調(diào)溫濕度監(jiān)控系統(tǒng)
2.1大區(qū)域空調(diào)溫濕度控制的難點(diǎn)
目前大區(qū)域空調(diào)溫濕度控制系統(tǒng)的控制方案,主要是采用將大區(qū)域劃分成若干子區(qū)域,即“大面積分區(qū)”,每個(gè)子區(qū)域安裝一定的溫、濕度傳感器,分別由一個(gè)空調(diào)子系統(tǒng)控制該子區(qū)域的空氣溫、濕度。控制方式一般采用PID控制,即采用測(cè)溫元件(溫感器)、PID溫度調(diào)節(jié)器和電動(dòng)二通調(diào)節(jié)閥的PID調(diào)節(jié)方式。在炎熱的夏季實(shí)質(zhì)上是調(diào)節(jié)位于該子區(qū)域的表冷器冷水管上的電動(dòng)調(diào)節(jié)閥;在寒冷的冬季是調(diào)節(jié)位于該子區(qū)域的加熱器熱水管上的電動(dòng)調(diào)節(jié)閥,通過控制調(diào)節(jié)閥開度的大小實(shí)現(xiàn)冷(熱)水量的調(diào)節(jié),以達(dá)到控制溫度的目的。由于控制面積大、檢測(cè)點(diǎn)傳感器的誤差以及空調(diào)系統(tǒng)工況的復(fù)雜性,經(jīng)常會(huì)出現(xiàn)相鄰的兩個(gè)空調(diào)子區(qū)域,為了達(dá)到相同的溫度平衡點(diǎn),一個(gè)空調(diào)子區(qū)域溫度高于設(shè)定溫度進(jìn)行表冷處理,在降低溫度;而另一個(gè)空調(diào)子區(qū)域溫度低于設(shè)定溫度進(jìn)行加熱處理,在升高溫度。這樣,不僅造成控制系統(tǒng)振蕩比較大,很難平穩(wěn)地過渡到溫度設(shè)定點(diǎn),而且還造成了極大的能源浪費(fèi),這就是大區(qū)域空調(diào)溫濕度控制的難點(diǎn)所在。
2.2 大區(qū)域空調(diào)溫濕度系統(tǒng)的特點(diǎn)
(1) 大區(qū)域空調(diào)系統(tǒng)的分解與協(xié)調(diào)
大區(qū)域空調(diào)系統(tǒng)是復(fù)雜大系統(tǒng),由于控制區(qū)域大,只用一臺(tái)大容量的空調(diào)進(jìn)行控制,不但很難達(dá)到恒溫、恒濕的控制要求,而且會(huì)造成能源的極大浪費(fèi)。所以,必須對(duì)大區(qū)域進(jìn)行分區(qū)處理,每個(gè)區(qū)域由獨(dú)立的空調(diào)子系統(tǒng)進(jìn)行控制。當(dāng)將若干個(gè)分區(qū)參數(shù)相同(或相近),而濕熱比各不相同的相鄰區(qū)域整合為一個(gè)大型的空調(diào)控制系統(tǒng)時(shí),就會(huì)遇到如何分區(qū)處理和如何確定送風(fēng)量的難題,也就是如何進(jìn)行協(xié)調(diào)控制的問題。
(2) 空調(diào)系統(tǒng)中檢測(cè)點(diǎn)的選擇
大區(qū)域空調(diào)的控制策略應(yīng)充分考慮工業(yè)中空調(diào)大風(fēng)量、小焓差的特點(diǎn),同時(shí)滿足環(huán)境工業(yè)要求、舒適衛(wèi)生和節(jié)約能源要求,突出測(cè)控全面、調(diào)節(jié)精確、方便適用的特色。基于以上原則,每臺(tái)空調(diào)控制區(qū)域分別設(shè)置4組溫度和濕度檢測(cè)點(diǎn),以4組溫、濕度檢測(cè)值的加權(quán)平均值作為控制用的檢測(cè)值。另外,在新風(fēng)口設(shè)置一組溫、濕度傳感器檢測(cè)新風(fēng)焓值作為新風(fēng)利用控制的依據(jù),送風(fēng)口設(shè)置防凝水檢測(cè)裝置,其檢測(cè)值作為防凝水控制的依據(jù)。空調(diào)機(jī)內(nèi)部設(shè)置溫度傳感器,檢測(cè)送風(fēng)情況,對(duì)空調(diào)機(jī)進(jìn)行溫度保護(hù),這樣雖然增加了檢測(cè)點(diǎn),但是由于空氣的熱慣性,仍然很難精確計(jì)算出空氣中各部分的實(shí)際溫度,因此大區(qū)域空調(diào)溫、濕度系統(tǒng)的控制屬于不確定性復(fù)雜大系統(tǒng)控制問題,檢測(cè)點(diǎn)的選擇顯得特別重要。
3、 控制策略的選取
由于被控對(duì)象的復(fù)雜性和不確定性,按傳統(tǒng)的方法,根據(jù)被控對(duì)象的數(shù)學(xué)模型,在滿足性能指標(biāo)及約束條件下,綜合設(shè)計(jì)控制器的方法是不能用的。因?yàn)閷?duì)不確定性復(fù)雜對(duì)象不可能建立嚴(yán)格的數(shù)學(xué)模型,綜合設(shè)計(jì)系統(tǒng)的前提條件不存在。對(duì)不確定性復(fù)雜系統(tǒng)的控制,一般采用以知識(shí)表示的非數(shù)學(xué)的廣義控制模型。可供選擇的策略有神經(jīng)網(wǎng)絡(luò)控制、模糊控制、實(shí)時(shí)專家系統(tǒng)控制、仿人智能控制等,它們都無需對(duì)象的數(shù)學(xué)模型。其中,人工神經(jīng)網(wǎng)絡(luò)(ANN Artificial Neural Networks)理論、實(shí)現(xiàn)方式及算法是人工智能(AI Artificial Intelligence)研究的重要課題之一。它作為一種軟件產(chǎn)品,廣泛應(yīng)用于信息技術(shù)和模式識(shí)別等智能化領(lǐng)域,近年來人工神經(jīng)網(wǎng)絡(luò)[2][3][4][5]在自動(dòng)控制領(lǐng)域得到了廣泛的應(yīng)用,為自學(xué)習(xí)、自適應(yīng)控制等提供了一種新的有效途徑。通過人工神經(jīng)網(wǎng)絡(luò)的離線訓(xùn)練和在線學(xué)習(xí),使控制器具有自調(diào)整和自適應(yīng)的性能,從而進(jìn)一步改進(jìn)實(shí)時(shí)控制效果,這里選取人工神經(jīng)網(wǎng)絡(luò)與控制技術(shù)相結(jié)合的控制策略,因?yàn)樗N近實(shí)際。
4 、人工神經(jīng)網(wǎng)絡(luò)在中央空調(diào)自動(dòng)控制系統(tǒng)中的實(shí)現(xiàn)
針對(duì)大區(qū)域中央空調(diào)監(jiān)控系統(tǒng)的傳統(tǒng)PID控制方案存在的問題,將人工神經(jīng)網(wǎng)絡(luò)技術(shù)引入到該監(jiān)控系統(tǒng)中。
4.1 網(wǎng)絡(luò)結(jié)構(gòu)的確定
對(duì)于BP神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)的確定包括了輸入層、輸出層節(jié)點(diǎn)個(gè)數(shù)的確定和隱藏層層數(shù)、隱藏節(jié)點(diǎn)個(gè)數(shù)的確定,以及神經(jīng)元的激活函數(shù)。其中輸入層、輸出層節(jié)點(diǎn)的個(gè)數(shù)與求解的問題密切相關(guān)。
(1) 神經(jīng)網(wǎng)絡(luò)層數(shù)
理論上已證明具有偏差和至少一個(gè)S型隱層加上一個(gè)線形輸出層的網(wǎng)絡(luò),能夠逼近任何有理函數(shù)。但這只說明了含有一個(gè)隱層能夠逼近任何有理函數(shù),并不一定是最好的。文獻(xiàn)[6]指出:逼近相同輸入維數(shù)的函數(shù),兩個(gè)隱層的網(wǎng)絡(luò)可能比單個(gè)隱層所需隱單元數(shù)少得多。增加層數(shù)還可以更進(jìn)一步的降低誤差,提高精度,但同時(shí)也使網(wǎng)絡(luò)復(fù)雜化。而精度的提高實(shí)際上也可以通過增加隱層的神經(jīng)元數(shù)目來獲得。
(2) 輸入?yún)?shù)及輸出節(jié)點(diǎn)的選取
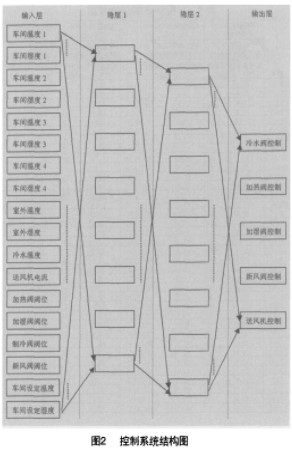
為了全面反映空調(diào)系統(tǒng)中室內(nèi)溫、濕度的變化,又考慮到神經(jīng)元網(wǎng)絡(luò)便于處理多輸入信息的特點(diǎn),選取4對(duì)車間溫濕度、室外溫濕度、冷水溫度、送風(fēng)機(jī)電流、加熱閥閥位、加濕閥閥位、制冷閥閥位、新風(fēng)閥閥位和車間設(shè)定溫濕度共18個(gè)參數(shù)作為輸入?yún)?shù),并將其輸入?yún)?shù)標(biāo)準(zhǔn)歸一化。輸出節(jié)點(diǎn)為冷水閥控制、加熱閥控制、加濕閥控制、新風(fēng)閥控制和送風(fēng)機(jī)控制等5個(gè)參數(shù)。取其中192個(gè)樣本組成訓(xùn)練集。
(3) 隱含層神經(jīng)元個(gè)數(shù)
隱層節(jié)點(diǎn)數(shù)的選擇是十分復(fù)雜的,隱含節(jié)點(diǎn)數(shù)與問題的要求、輸入輸出節(jié)點(diǎn)的多少有關(guān)。網(wǎng)絡(luò)訓(xùn)練精度的提高可以通過增加隱層神經(jīng)元個(gè)數(shù)的方法來實(shí)現(xiàn)。如果隱層節(jié)點(diǎn)太少,網(wǎng)絡(luò)可能難以訓(xùn)練或容錯(cuò)性差,但隱層節(jié)點(diǎn)過多又使學(xué)習(xí)時(shí)間太長(zhǎng),誤差也不一定最小。但究竟選取多少個(gè)隱層節(jié)點(diǎn),在理論上并沒有一個(gè)明確的規(guī)定。很多學(xué)者提出了不同的觀點(diǎn),有三種計(jì)算公式:
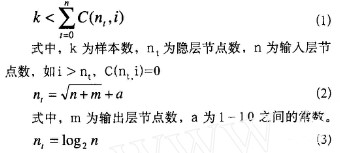
由此可見,對(duì)于神經(jīng)網(wǎng)絡(luò)這樣一個(gè)復(fù)雜的非線性動(dòng)態(tài)系統(tǒng)而言,很難找到有關(guān)其特性、容量等的簡(jiǎn)潔解析表達(dá)式。文中采用第二種方法確定隱層節(jié)點(diǎn)數(shù),并通過學(xué)習(xí)對(duì)隱層節(jié)點(diǎn)數(shù)進(jìn)行調(diào)整,直到滿足精度要求為止。
(4) 激活函數(shù)
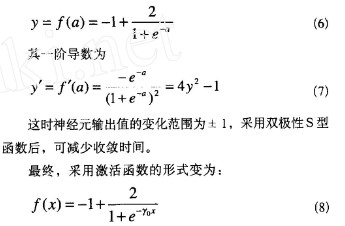
a) 在S型函數(shù)中加入可調(diào)系數(shù)
b) 在基本的S型函數(shù)中加入可調(diào)參數(shù),激活函數(shù)的形式變?yōu)?/p>

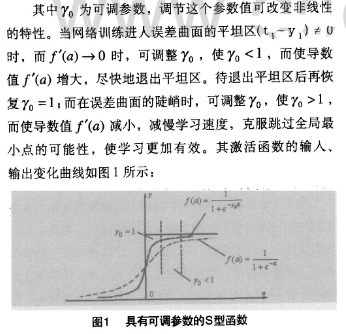
改變S形函數(shù)輸出動(dòng)態(tài)范圍
基本BP算法中神經(jīng)元的激活函數(shù),通常采用S形函數(shù),即

一般對(duì)數(shù)S型激活函數(shù)的輸出動(dòng)態(tài)范圍為(0,1),從網(wǎng)絡(luò)訓(xùn)練的要求來看,這不是最佳的。因?yàn)閺臋?quán)值凋整公式可知,權(quán)值的變化也正比于前一層的輸出,而因其中一半是趨向0的一邊,這必然引起權(quán)值調(diào)整量的減少或不能調(diào)整,從而延長(zhǎng)了訓(xùn)練時(shí)問,為了解決這個(gè)問題,采用雙極性S型函數(shù),即
(5) 學(xué)習(xí)速率的選取
在網(wǎng)絡(luò)權(quán)值的調(diào)整過程中,通常希望在學(xué)習(xí)的初始階段,步長(zhǎng)可選擇大一些;以使學(xué)習(xí)速度加快;當(dāng)接近最優(yōu)點(diǎn)時(shí),步長(zhǎng)又必須相當(dāng)小,否則連接權(quán)值將產(chǎn)生振蕩而難以收斂;當(dāng)處在誤差曲面的平坦區(qū)時(shí),步長(zhǎng)太小將使迭代次數(shù)增多;當(dāng)處在誤差曲面的劇烈變化區(qū)域,步長(zhǎng)又不宜太大,否則將跳過較好的極小值或全局極小值[8],通常是針對(duì)特定的問題,憑經(jīng)驗(yàn)和依據(jù)實(shí)驗(yàn)結(jié)果調(diào)整這些參數(shù)值。
由于本方案中使用了具有可調(diào)參數(shù)的激活函數(shù),為了使系統(tǒng)學(xué)習(xí)效果更加理想,既要使輸出達(dá)到期望值,又要盡可能的加快學(xué)習(xí)速度,因此,在學(xué)習(xí)速率的選取上采用學(xué)習(xí)速率自適應(yīng)調(diào)整方案。學(xué)習(xí)速率自適應(yīng)調(diào)整的一般規(guī)則是:在連續(xù)迭代幾步的過程中,新誤差都比舊誤差值大,學(xué)習(xí)速率將減小;若新誤差小于舊誤差時(shí),則增大學(xué)習(xí)速率。此方法可以保證網(wǎng)絡(luò)總是以最大的可接受的學(xué)習(xí)速率進(jìn)行訓(xùn)練,當(dāng)一個(gè)較大的學(xué)習(xí)速率仍能使網(wǎng)絡(luò)穩(wěn)定學(xué)習(xí),使其誤差繼續(xù)下降,則增加學(xué)習(xí)速率。一旦學(xué)習(xí)速率調(diào)得過大,而不能保證誤差繼續(xù)減少,則減小學(xué)習(xí)速率直到使其學(xué)習(xí)過程穩(wěn)定為止。選取學(xué)習(xí)速率的初始值 =0.2。
(6) 動(dòng)量系數(shù)的選取
為了保證過程的穩(wěn)定性,在每個(gè)加權(quán)調(diào)節(jié)量上加一項(xiàng)正比于前次加權(quán)變化量的值,即動(dòng)量系數(shù),其作用是使系統(tǒng)更加穩(wěn)定。在訓(xùn)練網(wǎng)絡(luò)時(shí),變更不同 值,對(duì)網(wǎng)絡(luò)進(jìn)行訓(xùn)練及預(yù)測(cè),當(dāng) >0.5時(shí),網(wǎng)絡(luò)不再穩(wěn)定,使網(wǎng)絡(luò)限于局部最小。因此分別選取動(dòng)量系數(shù) 為0.15、0.20、0.40、0.50,網(wǎng)絡(luò)比較穩(wěn)定。綜合考慮網(wǎng)絡(luò)的訓(xùn)練結(jié)果,動(dòng)量系數(shù) =0.2。
4.2 人工神經(jīng)網(wǎng)絡(luò)控制中程序設(shè)計(jì)與實(shí)現(xiàn)
(1) 學(xué)習(xí)樣本
網(wǎng)絡(luò)模型選取的樣本為企業(yè)生產(chǎn)車間某日從8:00到23:00每五分鐘采集的數(shù)據(jù)。車間面積為1200m2,由于車間面積較大以及廠方要求,每個(gè)空調(diào)區(qū)域共設(shè)置了四對(duì)溫濕度檢測(cè)點(diǎn)。輸入?yún)?shù)分別為:車間溫度1、車間濕度1、車間溫度2、車間濕度2、車間溫度3、車間濕度3、車間溫度4、車間濕度4、室外溫度、室外濕度、冷水溫度、送風(fēng)機(jī)電流、加熱閥閥位、加濕閥閥位、制冷閥閥位、新風(fēng)閥閥位、車間設(shè)定溫度、車間設(shè)定濕度共18個(gè)參數(shù),作為數(shù)據(jù)學(xué)習(xí)樣本,輸出節(jié)點(diǎn)為冷水閥控制、加熱閥控制、加濕閥控制、新風(fēng)閥控制和送風(fēng)機(jī)控制共5個(gè)參數(shù)。
(2) 控制系統(tǒng)結(jié)構(gòu)圖
綜合上述的分析,選隱層數(shù)為2,再根據(jù)隱層節(jié)點(diǎn)的第二種計(jì)算方法,并通過學(xué)習(xí),取 a=4,得出隱層節(jié)點(diǎn)數(shù)是n1=8 ,又知輸入?yún)?shù)n=18 ,輸出參數(shù) m=5,可得該中央空調(diào)人工神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)結(jié)構(gòu)圖如圖2所示。
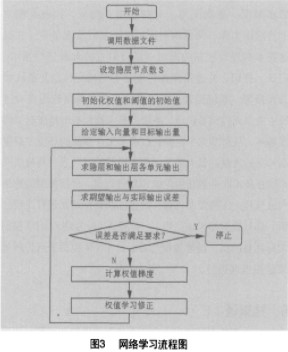
(3) 網(wǎng)絡(luò)學(xué)習(xí)過程程序流程圖
網(wǎng)絡(luò)學(xué)習(xí)過程程序流程,如圖3所示。學(xué)習(xí)終止條件設(shè)為:兩次響應(yīng)誤差之間的差的絕對(duì)值小于 ,或誤差小于 ,或?qū)W習(xí)次數(shù)大于5萬次而未收斂。如果出現(xiàn)第三種情況,就認(rèn)為學(xué)習(xí)不成功,用戶可以追加樣本個(gè)數(shù)或者調(diào)整輸入、輸出關(guān)系,對(duì)網(wǎng)絡(luò)進(jìn)行新的訓(xùn)練。當(dāng)然也可以繼續(xù)訓(xùn)練,但是如果訓(xùn)練次數(shù)過多,網(wǎng)絡(luò)不可避免的會(huì)出現(xiàn)“過學(xué)習(xí)”的情況,造成網(wǎng)絡(luò)對(duì)樣本集的依賴性增加,泛化能力減弱。
5、 工程實(shí)驗(yàn)與結(jié)果
5.1主要程序模塊
可用C語言編寫網(wǎng)絡(luò)學(xué)習(xí)過程程序,其中主要程序模塊有:樣本信號(hào)正向傳播過程模塊,誤差信號(hào)(導(dǎo)師)反傳過程模塊,網(wǎng)絡(luò)學(xué)習(xí)過程模塊,網(wǎng)絡(luò)工作過程模塊。
5.2 實(shí)驗(yàn)結(jié)果與分析
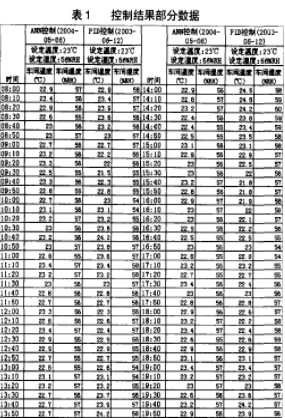
中央空調(diào)系統(tǒng)由空氣加熱、冷卻、加濕、去濕,空氣凈化,風(fēng)量調(diào)節(jié)設(shè)備以及空調(diào)用冷熱源等設(shè)備組成。被監(jiān)控參數(shù)主要有空氣的溫度、濕度、壓力(壓差)以及空氣清新度、氣流方向等,在冷熱源方面主要是冷熱水溫度、蒸汽壓力。有時(shí)還需要測(cè)量、控制供回水干管的壓力差,測(cè)量供回水溫度以及回水流量等。在對(duì)這些參數(shù)進(jìn)行控制的同時(shí),還要對(duì)主要參數(shù)進(jìn)行指示、記錄、打印,并能監(jiān)測(cè)各機(jī)電設(shè)備的運(yùn)行狀態(tài)及事故狀態(tài)和報(bào)警。系統(tǒng)經(jīng)改造后,將人工神經(jīng)網(wǎng)絡(luò)應(yīng)用在大區(qū)域中央空調(diào)控制系統(tǒng)后,系統(tǒng)的穩(wěn)定性和控制精度有了明顯提高,從而節(jié)約了能源,改善了生產(chǎn)車間的環(huán)境,對(duì)提高產(chǎn)品的質(zhì)量有很大幫助。為了說明控制效果,現(xiàn)將生產(chǎn)車間在技術(shù)改造前利用傳統(tǒng)PID進(jìn)行溫、濕度控制的數(shù)據(jù)和改造后人工神經(jīng)網(wǎng)絡(luò)溫、濕度控制數(shù)據(jù)結(jié)果進(jìn)行比較分析,部分?jǐn)?shù)據(jù)結(jié)果詳見表1,對(duì)照ANN控制和PID控制實(shí)際測(cè)量的溫、濕度數(shù)據(jù)可看出,ANN控制采用控制效果是相當(dāng)理想的。
6、 結(jié)束語
以上圍繞大區(qū)域中央空調(diào)系統(tǒng)溫濕度控制問題對(duì)相關(guān)各參數(shù)進(jìn)行了分析,結(jié)合某企業(yè)大區(qū)域中央空調(diào)監(jiān)控系統(tǒng)改造,將人工神經(jīng)網(wǎng)絡(luò)技術(shù)應(yīng)用在大區(qū)域中央空調(diào)控制系統(tǒng)中。文中對(duì)經(jīng)典BP網(wǎng)絡(luò)進(jìn)行了改進(jìn),研究?jī)?nèi)容包括:網(wǎng)絡(luò)結(jié)構(gòu)的確定,輸入?yún)?shù)及輸出節(jié)點(diǎn)的選取,隱含層神經(jīng)元節(jié)點(diǎn)的個(gè)數(shù),激活函數(shù)的選取,學(xué)習(xí)速率 和動(dòng)量系數(shù)的選取等,還給出了程序設(shè)計(jì)流程圖。工程實(shí)驗(yàn)表明:ANN在大區(qū)域中央空調(diào)溫、濕度監(jiān)控系統(tǒng)中的應(yīng)用前景是令人樂觀的。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6758瀏覽量
111839 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4810瀏覽量
102895 -
PID
+關(guān)注
關(guān)注
37文章
1480瀏覽量
87435
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)房溫濕度環(huán)境監(jiān)控系統(tǒng)用POE供電網(wǎng)絡(luò)型溫濕度傳感器
基于以太網(wǎng)的分布式溫濕度智能監(jiān)控系統(tǒng)
無人升空平臺(tái)溫濕度遠(yuǎn)程監(jiān)控系統(tǒng)設(shè)計(jì)
庫房無線溫濕度監(jiān)控方案 無線溫濕度監(jiān)控系統(tǒng) 倉儲(chǔ)物流無線溫濕度
求一種網(wǎng)絡(luò)式溫濕度監(jiān)控系統(tǒng)的設(shè)計(jì)方案
基于HCMAC神經(jīng)網(wǎng)絡(luò)最佳溫濕度匹配庫的建立
網(wǎng)絡(luò)式溫濕度監(jiān)控系統(tǒng)研究
基于網(wǎng)絡(luò)的溫濕度監(jiān)控傳輸系統(tǒng)的設(shè)計(jì)
基于網(wǎng)絡(luò)的溫濕度監(jiān)控傳輸系統(tǒng)的設(shè)計(jì)
中央空調(diào)溫濕度檢測(cè)系統(tǒng)硬件原理圖

中央空調(diào)溫濕度檢測(cè)系統(tǒng)設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論