 采用DSP和CPLD的硬件方案優化運動控制器
采用DSP和CPLD的硬件方案優化運動控制器
1 引 言
運動控制器是數控機床、機器人等一類機電一體化設備中常用的核心運動控制部件。現代數控技術對運動控制系統的開放性、實時性、加工速度和精確度等性能指標提出了越來越高的要求。隨著集成電路技術、微電子技術、計算機技術不斷發展,運動控制器已經從以單片機、微處理器和專用芯片作為核心的運動控制器發展到基于PC機平臺的以數字信號處理器(DSP)和復雜可編程邏輯器件(CPLD)作為核心處理器的協處理架構的開放式運動控制器。這種將P C機的信息處理能力和開放式的特點與運動控制器很強的運動軌跡控制能力有機地結合在一起,具有信息處理能力強、開放程度高、運動軌跡控制準確和通用性好的特點。這種模式在一個統一的人機對話平臺上,通過DSP算法和CPLD配置進行適當的調整來實現不同的硬件功能模塊,可以方便地和多種類型的驅動器進行連接。因此現在基于PC的新一代運動控制器成為控制系統的主流和發展方向。
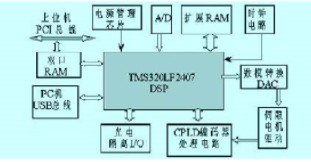
本文開發的開放式運動控制器以PC機為平臺,完成坐標變換、軌跡規劃、粗插補運算等控制指令的設置和發送,同時可以實時顯示當前伺服系統的運動位置、速度和電機狀態等參數。運動控制器以DSP芯片作為核心處理器,完成數據處理和控制算法、進行保護中斷的處理,通過PCI或USB總線與PC機實時通訊。CPLD芯片作為協處理器完成編碼信號的采集,鑒相處理,對脈沖和模擬量進行配置和輸出,把DSP處理過的控制數據經過內部轉換送到外部設備,并管理DSP和各種外部設備的接口。該運動控制器可以完成非勻速比同步運動控制,支持NURBS插補,并提供了豐富的動態鏈接庫函數。
2 運動控制器工作原理和硬件構成
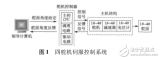
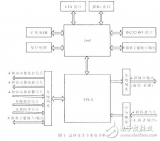
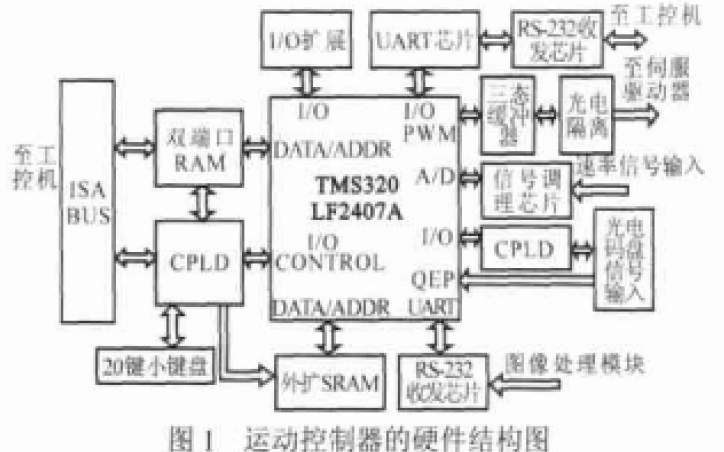
該控制器可實現四路編碼器反饋和電機控制,其核心是TI公司的TMS320LF2407數字信號處理芯片和ALTERA 公司的MAX 7000S系列CPLD器件EPM7128SLC84。控制器的硬件結構如圖1所示。DSP完成與上位機的實時通訊,對伺服電機速度和位置的精確控制,電機狀態監測和外部信號檢測等功能。雙口SRAM(DUAL-PORT STATIC RAM)不僅提供控制器與上位機的通訊接口,而且還為運動軌跡控制提供了足夠的緩沖區。由于一片DSP只提供兩組正交編碼脈沖(QEP)電路,對于多于兩個電機的控制器,若用多片DSP不僅會造成DSP資源的浪費,而且還會增加由于協調DSP之間的工作而產生的難度,因此這里我們用CPLD來提供另外兩組正交編碼脈沖電路,對速度、位置進行采樣,同時用CPLD提供高速穩定的其它邏輯控制電路。
運動控制器由基板和接口卡組成,集成了DSP核心電路,通信電路,CPLD譯碼、中斷、正交編碼處理電路,編碼器信號處理電路,電壓轉換電路,光電隔離電路等。運行過程中,PC機把粗插補的數據通過ISP-1581芯片傳遞給DSP進行時間分割精插補。在每一個伺服周期中,CPLD器件和DSP各處理兩路反饋的正交編碼信號進而獲取實時位置和速度,DSP計算出理論插補位置與實際位置的偏差,基于速度和加速度前饋進行PID調節,計算獲得速度控制量,產生的輸出信號經DAC7625進行數模轉換及放大電路放大后將模擬電壓發送至伺服驅動器以控制電機。
DSP兩個事件管理模塊中的正交編碼脈沖(QEP)電路可以實現對兩對正交編碼信號的四倍頻和方向檢測,其定時器工作在增減計數模式,依據電機運行情況進行計數。根據不同伺服周期定時器內數值的變化,可以計算獲得電機的實際位置,由M/T測速法可求得其運行速度。另外兩個電機的反饋信號由EPM7128進行處理,DSP與之通訊以獲取電機運行信息。擴展4個32位寄存器用來存儲電機當前位置,通過實時從計數器讀取每個伺服周期走過的脈沖數與之累加實現。每隔一定的伺服周期,將4個16位的計數器賦初值32000使之重新計數。
2.1 CPLD處理電路
CPLD主要包括正交編碼檢測邏輯電路,DSP地址譯碼電路和計數器及中斷邏輯四個部分,它對兩個正交編碼輸入四倍頻后進行計數,反饋給DSP。正交編碼脈沖電路的方向檢測邏輯決定了輸入序列中的哪一個是先導序列,接著就產生方向信號作為計數器的計數方向輸入。如果QEP1是先導序列,則所選的定時器增計數;如果QEP2是先導序列,則所選的計數器減計數。正交編碼脈沖電路對輸入的兩列脈沖的兩個邊沿都進行計數,因此,由它所產生的時鐘頻率是每個輸入脈沖序列頻率的四倍。中斷邏輯,限位和報警等信號產生時向DSP申請中斷。每個軸的正負限位信號、歸零信號和報警信號,四個軸共計16個信號,這些信號相或,只要有一個信號產生時就產生一個上升沿信號,此上升沿觸發DSP中斷,DSP以查詢方式判斷是哪個信號產生的中斷。
2.2 控制卡通訊及接口
早期PC機通過ISA總線實現對電機的控制,但響應速度慢,實時性差,后來的PCI局部總線,解決了ISA的傳輸速度慢等問題。近幾年通用串行總線USB(Universal Serial Bus)以其較快的傳輸速率和支持熱插拔等諸多優點而受到用戶的廣泛受青睞。得到了許多硬件和軟件廠商的支持。USB 2.0接口的最高傳輸速率由12Mb/s提高到了480Mb/s,能夠更好地支持數據實時傳輸。把USB引入運動控制器,實現了運動控制器的熱插拔,解決了計算機接口資源有限等問題,滿足了多軸運動控制卡對數據實時通訊的需要。為提高運動控制器硬件上的開放性,開發了通用的接口卡,輔助完成基板與外部的通訊。除了進行反饋信號等的必要傳輸外,還提供了電機的限位、回零、報警、伺服使能等信號和通用I/O各8路。為防止外界信號干擾,保證控制器的可靠性和安全性,輸入輸出信號都經由TLP521進行光電隔離。
3 速度、加速度前饋PID控制算法
本控制器采用典型的三環調節,其中速度調節器和電流調節器的功能由伺服電機驅動器完成,電流環用來提高系統的動態響應指標,增強系統抗干擾能力;速度環用于調節伺服電機的轉速。位置閉環調節原理框圖如圖2所示,它包括位置PID調節和速度、加速度前饋,由運動控制器底層程序完成,用于實現精確定位、回零等,輸出飽和控制可保證輸出電壓不會超過設定范圍。
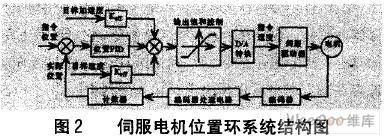
位置環的計算公式為:
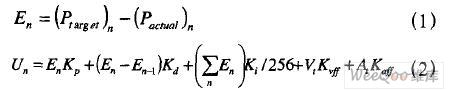
其中En為第n個采樣時刻的位置誤差;Ptarget為第n個采樣時刻的目標位置;Pactral為第n個采樣時刻的實際位置,Un為位置環輸出速度指令電壓;為第n個采樣時刻的累積誤差值;Vt為當前目標速度;Kvff為速度前饋增益;At為當前目標加速度;Kvff為加速度前饋增益;Kp、Ki、Kd分別為比例、微分和積分增益。
基于KLD-200二維數控平臺進行仿真。平臺由兩個Panasonic公司的MSMA012A 1E伺服電機及配套的MSDA013A1A驅動器進行控制。電機最高轉速為3000RPM,功率1 00W,增量式編碼器,2500P/r,絲杠導程為4mm/r。取Kp=100、Ki=12、Kd=2進行仿真。Y軸電機速度曲線與余弦曲線類似,跟隨誤差曲線如圖3所示。無前饋情況下電機跟隨誤差從開始的63個脈沖在0.137秒后上升到114個脈沖,隨后作類似余弦曲線的變化。引入前饋后,跟隨誤差從開始的63個脈沖迅速上升到109個脈沖,然后逐漸下降,在大約0.2秒后穩定在±2個脈沖之間。可見,速度和加速度前饋大大減小了系統的跟隨誤差。利用自己開發的運動控制器對數控平臺反復進行控制實驗,效果良好。梯形曲線控制實驗中,設定加速度為10rev/s2,目標速度300RPM,位移120mm。到達目標速度后,驅動器顯示的電機速度波動范圍在±2RPM之間。利用VC的OnTimer()函數實時獲取位置信息并進行顯示,可以看出,到位后的最大超調量約為5~10個脈沖,穩態誤差在±2個脈沖之內,小于1mm。
5 結束語
本運動控制采用基于DSP和CPLD的硬件方案充分發揮了DSP芯片實時高效的處理能力,系統設計合理,可以實現變傳動比的電子齒輪和多軸插補功能。控制器采用了基于速度和加速度前饋的PID調節和NURBS插補等先進理論,實驗和仿真結果表明,該運動控制器實時性好,控制精確度高,跟隨誤差小,理論跟隨誤差小于2個脈沖,位置控制誤差小于1mm,可以滿足高速高精度加工的要求。
-
dsp
+關注
關注
554文章
8059瀏覽量
349857 -
cpld
+關注
關注
32文章
1257瀏覽量
169524 -
控制器
+關注
關注
112文章
16444瀏覽量
179026
發布評論請先 登錄
相關推薦


基于DSP與FPGA的運動控制器的軟硬件設計方案分析
基于DSP的運動控制器的探究
基于CPLD的開放式四軸運動控制器的硬件、軟件設計
如何使用DSP和CPLD進行運動控制器的設計與應用資料說明
基于DSP和CPLD實現開放式運動控制器的設計





 工商網監
工商網監
評論