 針對CDMA系統功率控制算法進行分析
針對CDMA系統功率控制算法進行分析
CDMA移動通信系統具有抗干擾能力強,保密性好,容量大等優點,受到廣泛的關注。CDMA是利用碼序列的正交性和準正交性區分不同用戶,它是在同頻、同時的條件下,各個接收機根據信號碼型之間的差異分離出需要的信號。由于CDMA系統中同一頻率在所有的小區重復使用,CDMA中的干擾特別嚴重,若沒有先進的功率控制技術,盡可能減小用戶的背景干擾,就會產生嚴重的誤碼現象。隨著用戶數的增加,信號的信噪比急劇下降。當低于一定門限時,就可能發生通信中斷。由于CDMA系統存在傳輸衰減、多址干擾、遠近效應等問題,系統容量受限于用戶間的相互干擾,因此,必須對功率進行控制。本文主要針對CDMA系統中的功率控制算法進行研究。
1、功率與容量的關系
在CDMA系統中,由于發射功率的制約或系統自身的干擾,CDMA系統的容量受到限制。在反向鏈路上,當一個移動臺的功率不足以克服其他移動臺的干擾時,系統達到容量極限。在前向鏈路上,當基站的總功率沒有多余的部分分配給一個新的用戶時,系統達到昂大容量。即當一個基站為使其全部用戶正常的運行而發射的總功率超過基站的額定功率時,前向鏈路就達到受功率限制的容量。
為了接入一個呼叫,CDMA移動臺的功率必須大到足以克服帶寬內其他CDMA移動臺產生的干擾,即必須達到一定的信號干擾比。在任意給定時刻,移動臺所需要的發射功率取決于從移動臺到基站的路徑損耗和所有反向鏈路總的干擾電平。后者取決于其他CDMA移動臺的數量和位置。
所有的移動臺每建立一個新呼叫就提高了干擾電平,每一移動臺也就必須相應地增加發射功率以保持呼叫的完整性。這個過程隨著移動臺的增加而反復進行,直到達到一個極限值。達到這個極限時,任何一個新的移動臺,無論其位置在哪,都無法以足夠的功率來克服,而現有的移動臺也沒有足夠的功率來克服新呼叫產生的附加干擾。小區內所有呼叫都要具有相同的Eb/I0要求,這個限制表現為要求小區基站接收到的信號強度都等于一個相同的值。對于任何一個移動臺,小區內的干擾即為(N-1)S,N為小區內的移動臺的數目。來自小區外移動臺的共道干擾是一個次級的干擾源,它的大小可以取為小區內干擾的部分值(β倍)。由于周圍移動臺的發送強度相對較低,且路徑損耗距離更遠,由此產生的干擾電平通常可以由β<1來表征,這個值小于小區基站的噪聲電平。與小區干擾不同,小區外的移動臺的干擾不是通過本小區基站的接收機進行功率控制,所以干擾大小更難確定,然而僅需要知道外部移動臺的總體影響即可。
由于共道干擾電平相對較小,對于周圍滿負載的小區也可采用相同的β值,對于大的N值,所有的干擾可以由話音激活因子來減小。
式中:Eb為比特能量;I0為熱噪聲加干擾的功率譜密度;F為基站噪聲指數;Nth為熱噪聲的功率譜密度;S為接收信號強度;R為比特速率;α為話音激活因子;β為干擾因子;N為小區內移動臺的數目;W為系統帶寬;G=W/R為處理增益。熱噪聲密度Nth,CDMA帶寬W和基站噪聲指數F之積稱為基站噪聲。
小區基站接收機所要求的Eb/I0取值的范圍是關于移動臺速度和多徑條件的慢衰落,不同的類型的用戶為保持一定的FER就有不同的Eb/I0要求。高速移動用戶與低速和靜止情況相比EB/I0也不相同。
式中:d為所需的Eb/Ib。當使用13 Kb/s聲碼器時,對于一個扇區大約為24。重寫表達式(1)得每個用戶平均需要的信號功率為:

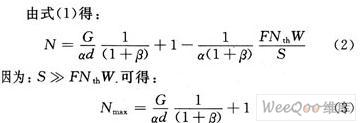
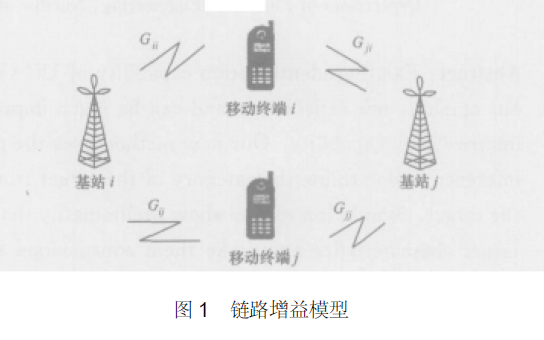
從圖1可知,每個用戶所需的小區基站的信噪比隨小區負載的加重而非線性增加,負載越大,斜率越陡,小區付出的平均功率代價要大的多。因此,每增加一個移動用戶,一個高負載的小區比一個低負載的小區付出的代價大,另外,負載過重的小區將不能響應其用戶話音激活的統計波動。進一步調整式(1)以反映總的接受干擾Prec=α(1+β)NS。Prec與基站噪聲之比可以由小區負載u=N/Nmax完全表示出來,從圖2可看出干擾是隨小區負載非線性增加的。
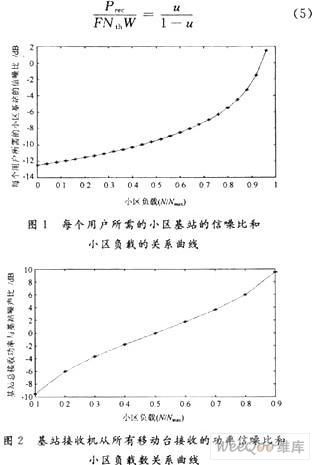
功率和負載之間的關系可以表示為總功率(接收信號加基站噪聲)與基站噪聲之比為:

從圖3上可看出每次增加容量的一半時,總功率與基站噪音之比就增加一倍,例如當負載從0 dB增加到0.5 dB時,總功率與基站噪音之比從0 dB增加到3 dB;當負載從0.5 dB增加到0.75 dB時,這個比值就從3 dB增加到6 dB。
2、功率控制信道仿真模型
為了實現功率的實時控制,在信道中不僅考慮由陰影和路徑損失所引起的慢衰落,而且要考慮由多徑傳播引起的快衰落。慢衰落的統計規律可表示為:

其中:r是基站與移動臺的距離;α是路徑損耗指數;ξ是均值為0,標準方差為σ的高斯隨機變量。σ和α的典型值為8 dB和4 dB,如圖4所示。
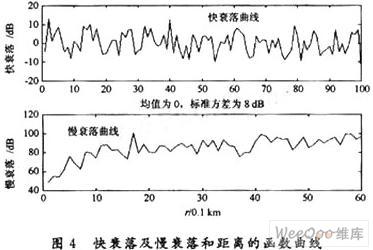
如圖4所示,慢衰落是基于距離的函數,在很短的時間內(如幾個ms),用戶與基站間的距離沒怎么大的變化,因此為了方便系統仿真,暫且可以看作是不變的。對于快衰落,本次仿真采用Jakes提出的一種模擬移動通信衰落技術的Jakes模型。移動臺與基站的相對運動引起的接收電平的頻率變化,稱為多普勒頻移,最大頻移fm=υm/λ其中υm是最高車速,λ是載波波長,ωm=2πfm。瑞利衰落過程可以通過疊加N個復正弦曲線來近似,這組正弦曲線的頻率和相位由特定的公式給出。定義N0=(1/2)(N/2-1),則衰落信道的信道函數T(t)可以表示為:
式中:ωn=ωmcos(2πn/N),n=1,2,…,N0;φN是最大多普勒頻率正弦曲線的初始相位,φn=第n個多普勒頻移正弦曲線的初始相位。移動臺的速率為50 km/h(13.9 m/s),多普勒頻移fm=41.6 Hz。N0=8,φN=0。采用Matlab進行仿真,如圖5所示。
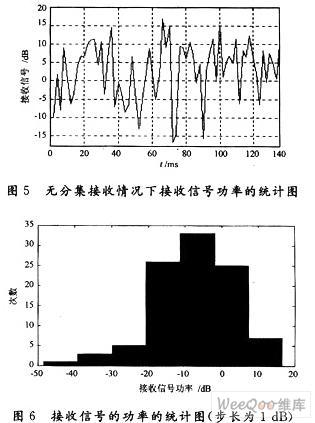
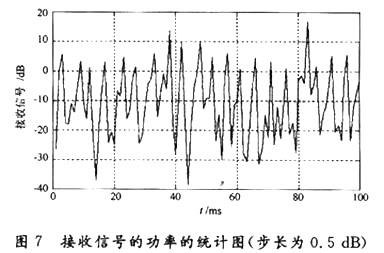
從圖5可看出,固定步長功率控制算法在無分集接收情況下,接收信號有很強的“過沖”現象,這是由于系統根據上一時刻的接收信號的功率的強度來決定下一時刻的功率調整方向,而且每次的功率控制在系統出現深度衰落的時刻,就會無法即時補償,而在控制誤差很小時,將引起很大的波動。接收信號的功率的統計圖如圖6所示。
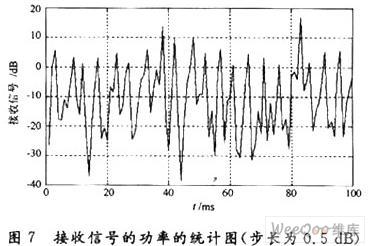
從圖6可以看出,實際接收的信號在期望值的附近波動,而且分布的兩邊是非對稱。比較步長為1 dB的圖6和步長為0.5 dB的圖7,可發現在相同的衰落情況下,步長為1 dB的算法比較適合。從這里也可看出步長的取定與具體環境(如衰落程度和背景干擾)有關,這也是固定步長功率控制的弊端所在。
3、結語
這種功率控制算法,允許基站發送功率控制命令,用戶通過控制命令,以固定的步長調整發射功率,功率改變的過程就像一個“乒乓”控制,這種控制方法的系統穩定性差,且有很大的過調量和穩定時間。單純從功率控制的角度,提高控制精度的方法有兩種。一是提高功率測量速度,相應地提高功率控制的頻度,從而增大相鄰的兩個樣點的相關程度以達到提高控制精度的目的;另一種方法是提高控制量的精調程度,每次控制命令用多個比特來表示,從而提高控制精度。
-
CDMA
+關注
關注
1文章
584瀏覽量
118058 -
通信系統
+關注
關注
6文章
1195瀏覽量
53376 -
功率
+關注
關注
14文章
2068瀏覽量
69922
發布評論請先 登錄
相關推薦
基于接收功率的多業務接納控制算法
時變移動通信系統功率控制算法與仿真研究
不完美開環功率控制的CDMA系統分析
基于CDMA 移動通信系統的功率控制算法研究

如何實現CDMA移動臺的生產功率校正算法
如何使用遺傳算法進行功率控制的詳細方法說明





 工商網監
工商網監
評論