 采用分布式結構和LIN總線技術實現車身控制系統的設計
采用分布式結構和LIN總線技術實現車身控制系統的設計
1、引言
隨著汽車電子的迅猛發展,現代汽車中電控單元的數量也逐漸增多,這些電控單元大致可分成動力傳動裝置控制(如發動機控制和變速控制)、底盤控制(如汽車防抱死系統ABS)和車身控制三類。其中車身控制系統主要用來提高駕駛的方便性和乘坐的舒適性,該系統涵蓋的范圍較廣,包括燈光控制、車門控制、座位控制、氣候(空調)控制、儀表盤顯示等。本文將介紹一種分布式車身控制系統的設計方法,該系統可對汽車燈光、雨刷及底盤部分電磁閥等節點進行分布式控制。
該控制系統的主要功能如下:
●控制汽車上所有車燈。
●控制雨刷低速、高速、間歇式工作。
●控制與取力器、全輪驅動、輪間和軸間差速器相連的電磁閥工作。
●實時響應駕駛室控制開關的動作:按照SAE(Society of Automotive Engineers)的標準,實時性響應時間在10ms~100ms之間。
●燈光自檢功能:汽車上電后所有的燈點亮5ms后熄滅,以檢查所有燈是否工作正常。
●故障診斷定位能力:智能功率開關具有過流、過溫、過壓保護和開路檢測功能,MCU通過檢測智能功率開關各通路的State引腳狀態可判斷出哪路負載出現故障。
2、系統結構
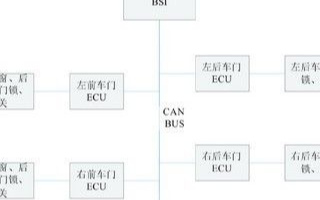
該系統采用分布式結構。因為車身控制系統的控制對象比較多而且位置分散,若采用點對點集中控制方式,控制模塊與被控對象之間就需要大量連接電纜,這勢必造成車內布線復雜、制造和安裝困難,并存在故障隱患。而分布式系統結構可以根據控制對象的位置來設計控制模塊,從而縮短了控制對象和控制模塊的距離。各模塊間通過LIN總線來通訊,該方式僅需一根線作為通訊線,這樣加上地線和電源線總共三根線,從而簡化了布線和系統結構,增加了系統的靈活性,并可方便地增減節點。此外,分布式系統結構還可降低單板的靜態電流,增加單板的穩定性。圖1所示是其系統結構圖。
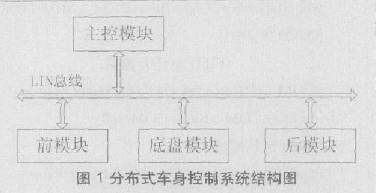
根據系統功能要求和結構特點,該控制系統被分成主控模塊和三個子模塊(前模塊、底盤模塊和后模塊)。其中主控模塊位于車的駕駛室內,主要檢測駕駛室內控制開關的狀態,并根據這些控制開關的狀態實現相應的控制策略,然后將控制命令發送給各子模塊,同時檢查各用電設備的工作狀態,若有故障則報警顯示。前模塊位于車的前部,主要控制車前部的用電設備,包括車前部的燈(遠光燈、近光燈、霧燈、左右前轉向燈)、雨刷、風扇、加熱、緊急報警、喇叭的工作等。底盤模塊位于車的底盤,主要控制與取力器、全輪驅動、輪間和軸間差速器相連的電磁閥的工作。后模塊位于車的后部,主要控制車后部的用電設備,包括尾燈、剎車燈、左右后轉向燈的工作。
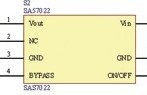
主控模塊和子模塊的功能如圖2所示。其中電壓調整單元可將汽車內的24V電壓轉換成5V電壓,供給單片機、功率芯片等電壓為5V的芯片。
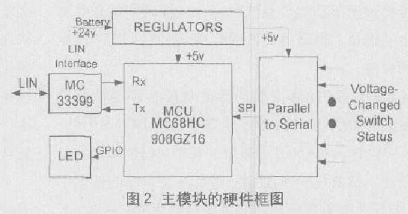
主模塊中的微處理器控制單元(MCU)采用Mo-torola的MC68HC908GZ16來實現,主要用于采集輸入的開關狀態,以完成相應的控制策略,同時將控制命令通過串口送給各子模塊,并根據各子模塊反饋的負載狀態判斷是否存在故障,若有故障則報警顯示。圖3所示是主模塊的硬件原理圖。
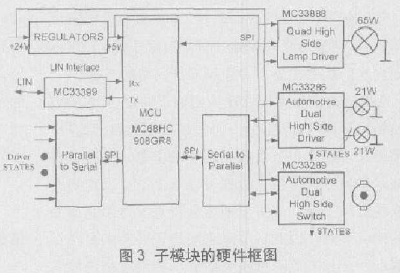
各子模塊中的微處理器控制單元采用MC68HC908GR8,主要用于完成負載驅動,并采集負載的工作狀態發送給主控模塊。
開關狀態檢測單元的任務是在24V的開關狀態電壓轉換成5V后,將此并行數據轉換成串行數據送給MCU,這樣可大大減少所需MCU的引腳數量。
功率驅動單元由功率芯片和串/并轉換芯片組成,功率芯片代替了傳統的繼電器后,許多汽車負載不能被MCU或低電流接口器件直接驅動,但功率芯片可通過MCU控制輸出大電流來驅動各種負載。各子模塊可根據所帶負載來選擇不同的功率芯片?本設計選用MC33286和MC33888來驅動阻性負載,選用MC33289來驅動感性負載。MCU通過I/O端口串行輸出控制命令后,將通過串/并芯片送給功率開關。
故障顯示單元用三個發光二極管表示三個子模塊,若其中某個子模塊出現故障,相應的發光二極管會點亮,同時蜂鳴器會報警。此時該子模塊上用發光二極管來表示子模塊所驅動的負載狀態顯示也會作出響應,從而可以非常直觀地看出子模塊上哪路負載出現開路、過流、過溫、過壓等故障。
3、系統通訊
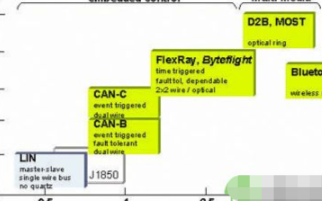
本系統采用LIN總線通訊方式。LIN總線是基于通用SCI/UART接口的,其成本要低于CAN通訊。LIN可以作為CAN通訊網絡的輔助。LIN總線主要應用于不需要CAN的性能、帶寬及復雜性的低速系統,如開關類負載或位置型系統(包括車的后視鏡、車鎖、車座椅、車窗等)的控制。因此,LIN更有助于實現汽車與CAN網絡連接的分布式控制系統。
LIN總線的特點如下:
●采用低成本的單線12V數據傳輸,線驅動和接收特性符合改進的ISO 9141單線標準;
●傳輸速率可達20kbit/s ;
●采用單主/多從的結構,不需要總線仲裁,由主節點來控制總線的訪問;
●基于通用UART/SCI的硬件接口,幾乎所有的微控制器都有LIN 必需的硬件;
●從節點不需要晶振或陶瓷振蕩器就可實現自同步,從而減少了從節點的硬件成本;
●最差狀況下的信號傳送等待時間可得到充分保證,因此可避免總線訪問沖突。
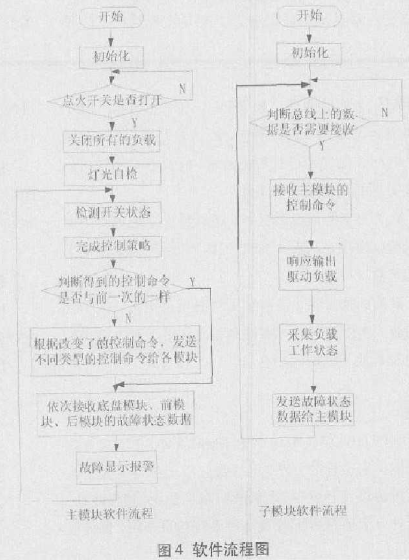
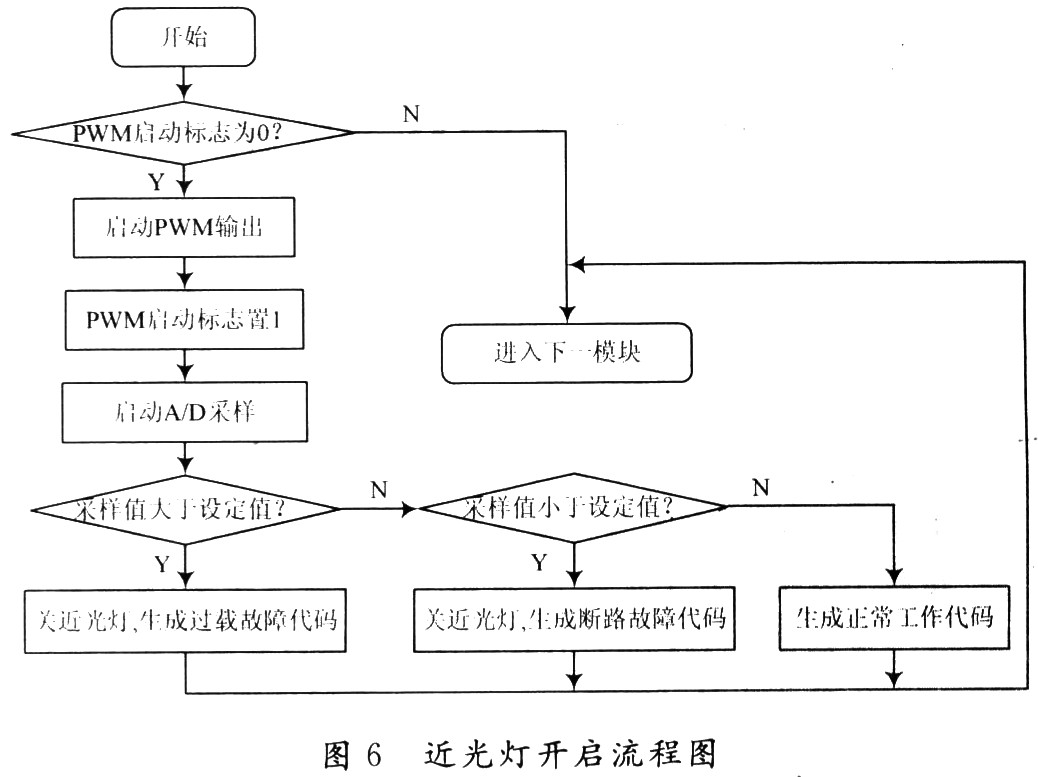
本系統的通訊順序由主控模塊控制,LIN的數據幀是按數據內容,而不是數據的目的地址定義的。這樣定義可使多個節點收到同樣的信息,并且數據能夠以多種方式交換。數據可以從主節點發送到一個或多個從節點,也可以通過從節點發送給主節點或其它從節點。因此從節點之間的通訊并不需要經過主節點,并且主節點可以將信息廣播給網絡內的所有節點。系統中的數據通訊主要是主模塊向三個子模塊發送控制命令和三個子模塊向主模塊反饋故障狀態數據。本系統定義了四種數據類型,一種是三個模塊各自接收的數據,第二種是前模塊和后模塊同時接收的數據,第三種是三個模塊同時接收的數據,第四種是三個模塊各自獨立發送的數據。其通訊過程可參見圖4所示的系統軟件流程。
4、系統抗干擾設計
由于汽車上的電磁干擾比較厲害,因此對系統的抗干擾能力要求較高,本系統在硬件和軟件上均進行了抗干擾設計。在硬件上,通訊線路采用了光電隔離電路?電源也采用DC-DC隔離。在電源和地之間設計了一個去耦電容,可用來過濾掉來自電源的高頻噪聲。在印刷線路板的布局上,將數字電路和功率驅動電路合理分開,這可使相互間的信號耦合減少到最小。在軟件上采用了看門狗技術,從而增加了系統的可靠性。
5、結論
本設計方案可實現分布式車身控制系統的基本功能,且結構簡單、成本低。此外,該設計思想同樣也適用于轎車和中型車輛控制。
責任編輯:gt
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
汽車電子
+關注
關注
3026文章
7941瀏覽量
166910 -
總線
+關注
關注
10文章
2878瀏覽量
88052
發布評論請先 登錄
相關推薦
基于LIN總線的車身控制系統的設計
基于虛擬儀器的城市景觀照明分布式控制系統設計與實現
分布式控制系統
CAN總線在車輛分布式控制系統中的應用
基于LIN總線的車燈控制系統設計


基于CAN總線和分布單元控制器實現高壓變頻分布式控制系統的設計





 工商網監
工商網監
評論