 ABB工業機器人DSQC1030新I/O配置介紹
ABB工業機器人DSQC1030新I/O配置介紹
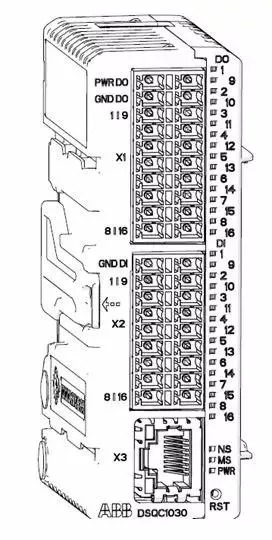
1)ABB新機器人逐漸開始使用DSQC1030(如下圖)代替原有DSQC652IO版
2)該硬件使用Ethernetip協議。機器人不需要額外配置選項。如果機器人需要做主站連接其他Ethernetip從站或者機器人做Etherneti從站連接其他設備主站,仍需要購買選項841-1Ethernetip Scanner/Adapter
3)硬件連接:
出廠會默認把X5網口(設備底部)和控制器X4 LAN2口上
硬件最上端的x4為設備供電,默認已經從xt31引電過來
X1為輸出,其中PWR DO和GND DO為DO的24v和0v,需要單獨接電(也可從XT31引電),相當于之前DSQC652的9和10針腳
X2為輸入,其中GND DI為DI的0v,需要單獨接線(也可從XT31接線)
4)第一次開機后,系統會自動識別硬件,給出提示
5)根據提示配置,完成配置后就自動分配16di和16do
6)如果開機錯過配置提示,也可進入控制面板-配置-Ethernetip Device,添加
模板選擇ABB LOCAL I/O,地址192.168.125.100
7)后續添加signal,方法和之前類似,所屬設備選Local IO
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
面板
+關注
關注
13文章
1677瀏覽量
53897 -
工業機器人
+關注
關注
91文章
3367瀏覽量
92694 -
ABB
+關注
關注
26文章
525瀏覽量
52768
原文標題:ABB工業機器人新I/O DSQC1030配置
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ABB機器人與西門子PLC的Profinet通訊設置
在現代工業自動化領域中,機器人與PLC之間的通訊是實現高效、精準生產的重要環節。ABB機器人與西門子PLC之間的Profinet通訊設置,是實現兩者無縫對接的關鍵。本文將詳細
abb機器人系統如何添加選項
ABB機器人系統是一種廣泛應用于工業生產領域的自動化設備。在實際應用中,用戶可能需要對機器人系統進行一些配置和設置,以滿足特定的生產需求。本
abb機器人常用指令大全
ABB機器人是一種廣泛應用于工業自動化領域的智能設備,其指令系統豐富多樣,能夠滿足各種復雜場景的需求。 基本指令 1.1 Move指令 Move指令是ABB
工業機器人abb左邊布局沒了怎么辦
布局丟失或出現問題,可能會影響機器人的正常運行和操作。本文將詳細介紹如何排查和解決ABB工業機器人左邊布局丟失的問題。 1. 確認問題 首先
abb機器人movej和movel的區別
ABB機器人是一種廣泛應用于工業自動化領域的智能設備,具有高度的靈活性和可靠性。在ABB機器人的編程和操作中,movej和movel是兩種常
abb機器人的io通信和信號設置過程
引言 ABB機器人作為工業自動化領域的重要設備,其IO通信和信號設置是實現機器人與外部設備進行數據交換和控制的關鍵。本文將詳細介紹
abb機器人的基本配置包括哪些
ABB機器人是一種廣泛應用于工業自動化領域的智能設備。它具有高度的靈活性、可靠性和精確性,可以完成各種復雜的任務。為了實現這些功能,ABB機器人
abb工業機器人的編程語言是什么
ABB工業機器人的編程語言主要是RAPID(Robot Application Programming Interface for Development),它是一種高級編程語言,專門為工業
ABB工業機器人運動指令有哪幾個
ABB工業機器人是一種廣泛應用于制造業、物流、醫療等領域的自動化設備。其運動指令是實現機器人精確控制的關鍵。以下是對ABB





 工商網監
工商網監
評論