 通過LMC078實現單軸控制
通過LMC078實現單軸控制
Modicon LMC078是一款具有多種強大控制功能的運動控制器。本體自帶Canopen、SercosIII、Modbus TCP、串行通訊等多種通訊接口,并可擴展Ethernet IP、Profibus DP(slave)。
通過安全、高速的SercosIII總線可實現最多 24軸的同步控制功能,同步時間可控制在4ms以內。
下面具體介紹LMC078搭配LXM32S伺服的應用
Somachine組態
添加軸
設置地址
位置比例設置
第一行:設置編碼器分辨率
LXM32編碼器分辨率為131072,對應十六進制為16#20000,一般默認無需更改
第二行:設置減速機的減速比
如果減速比為5,則左邊寫入5,右邊寫入1
第三行:位置比例設置
如果左邊寫入1,右邊寫入360,則表示360個用戶單位對應齒輪輸出轉數為1圈
因為減速比為5,則360個單位對應電機旋轉5圈,即360/5=72個用戶單位對應電機轉1圈
注意:此處位置比例配置與編程時給定速度和加速度的單位相關
s=User Unit
v=User Unit/s
a=User Unit/s2
控制器選擇中掃描,選中PLC并雙擊激活
設備尋址中點擊開始掃描
正常顯示
編程
基本的運動功能塊與LMC058類似,但參數讀寫需要調用
FB_SercosReadServiceDataAsync和FB_SercosWriteServiceDataAsync實現
-
控制器
+關注
關注
113文章
16580瀏覽量
180455 -
串行通訊
+關注
關注
2文章
77瀏覽量
16474 -
LMC078
+關注
關注
0文章
1瀏覽量
2457
原文標題:LMC078通過SercosIII總線控制LXM32S實現單軸控制
文章出處:【微信號:SE_AUT,微信公眾號:自動化小天地】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TRINAMIC推出低成本的單軸運動控制芯片
LMC7215/LMC7215-Q1/LMC7225的軌對軌CMOS比較器
步進定位單軸定位控制實驗
Modicon LMC078運動控制器編程指南

ModiconLMC078可編程運動控制器產品目錄

lmc058運動控制器產品手冊
HPM6750芯片實現HMI與四軸伺服運動控制方案
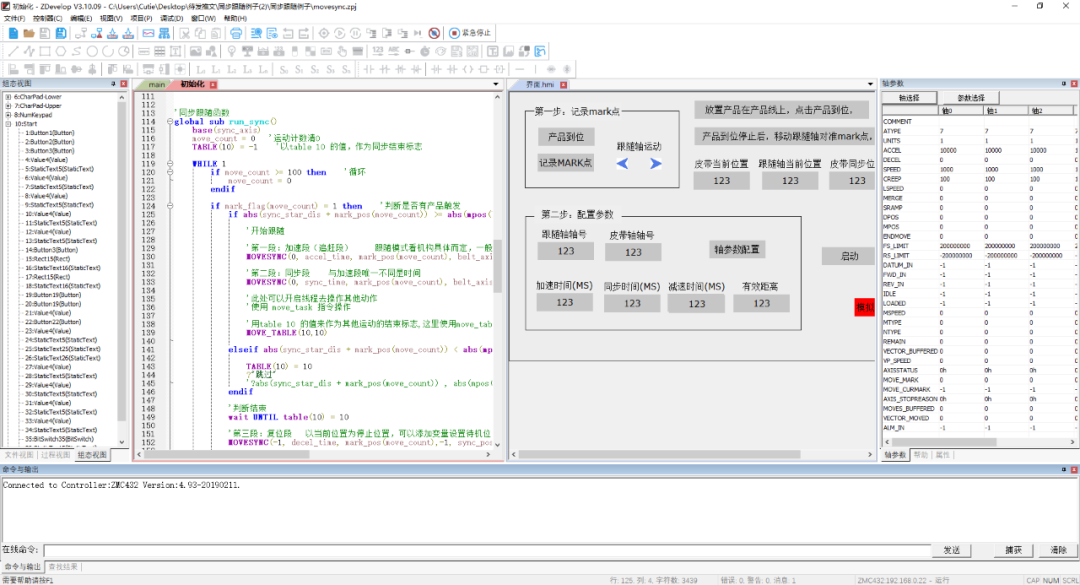
運動控制器如何快速實現單軸/多軸同步跟隨功能?
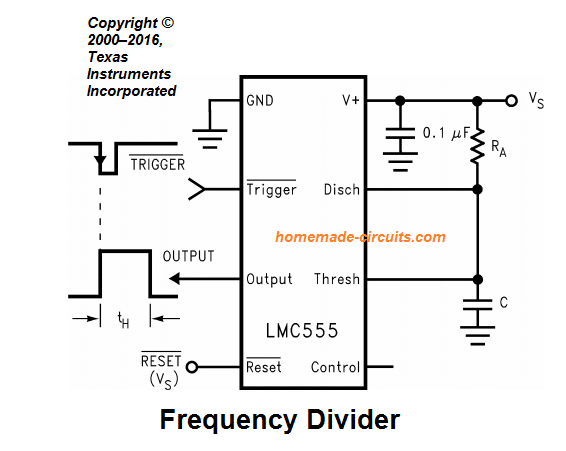
基于CMOS版本IC LMC555的應用電路
全國產EtherCAT運動控制邊緣控制器(四):軸參數配置與單軸運動PC上位機C++控制






 工商網監
工商網監
評論