


摘要:
為了實現對骨關節空間角度的數字化測量與功能客觀評價,建立了骨關節角度數字化測量與功能評估系統。對該系統所采用的骨關節空間角度測量、功能評估算法進行研究。首先,根據Kinect數據采集原理及空間向量計算方法介紹了骨關節空間角度測量算法,即在Kinect深度數據流基礎上將骨關節點空間位置信息轉換為對應的三維空間坐標,根據空間向量夾角公式計算骨關節空間角度。然后,在分析比較分類評價方法的性能基礎上,說明了采用K-means聚類方法進行骨關節功能評估的算法。實驗結果表明,系統可以為用戶提供骨關節的數字化測量與功能評估結果,評估指標purity、RI與F-meaures等能穩定在0.8及其以上,基本滿足骨關節功能評價的非接觸、客觀高效、適應能力強、準確度高、操作簡便和成本低等要求。
?
0 引言
目前有關骨關節疾病的診斷與功能評估大都基于醫生臨床查體、醫學影像成像技術,通過分析MRI、CT、X線檢查結果,根據經驗對病情做出大致判斷與分析,制定相應救治方案,并以此作為后期康復指導的依據,總體來說以醫生的主觀判斷與評價為基礎,缺乏對病人客觀、精確的功能參數分析[1]。另外,現有醫學影像設備有輻射且價格相對昂貴,不適合長期康復治療的效果評估與藥物指導。
近年,3D實感攝像設備在國內外發展很快,其中Kinect作為一款具有視覺和深度信息采集的圖像聲音傳感器,可以通過跟蹤定位人體20個主要關節點的位置深度信息而實現人體三維骨架的構建[2-3],將它們應用在骨關節疾患的運動功能監測中,可為醫務人員在診斷、治療方案確立、治療前后功能對比評價以及康復指導等過程提供一種更客觀有效的依據[4-5]。
本文將Kinect應用于骨關節空間角度的實時測量之中建立了骨關節空間角度數字化評估系統,并討論了測量中的骨關節空間角度測量、功能分類評估等關鍵算法。實驗證明3D實感攝像技術應用于骨關節空間角度測量與功能評估領域,在保證數字化測量要求的同時,可使系統具有客觀功能評價、非接觸、適應能力強、快速高效、準確、操作簡便和成本低等特點。
1 系統構成及其工作原理
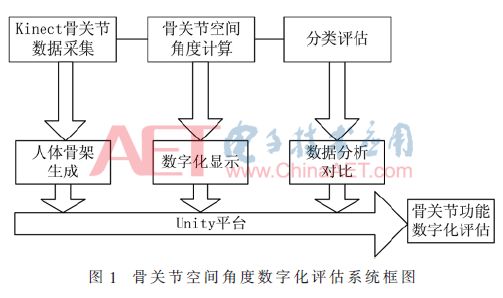
圖1為骨關節空間角度數字化評估系統框圖,主要由Kinect骨關節數據采集、骨關節空間角度計算、骨關節功能分類評估等組成。系統基于Unity開發平臺,利用體感設備Kinect進行深度數據采集;實時計算關節點空間角度并以數字化方式在界面上顯示;同時通過數據分析與對比,完成骨關節空間角度數字化評估工作。
2 系統實現
2.1 Kinect骨關節數據采集
基于Kinect的骨關節數據采集過程包括人物控制與骨骼點的綁定、骨架系統生成及關節點坐標表示。
2.1.1 人物控制與骨骼點的綁定
為了控制系統場景中人物角色的移動,需要添加兩個人物控制器分別對應于人物場景模型和人物骨架模型。其中,人物場景模型由一系列分別代表頭部、肩部、手等人體部位的20個關節點組成。人物骨架模型對應Kinect控制的模型,控制場景中的角色的移動。
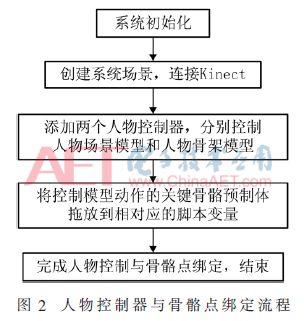
將骨架模型中控制動作的關鍵預制體拖放于相對應的腳本變量上,即可完成人物控制與骨骼點的綁定。人物控制器與骨骼點綁定具體實現流程如圖2所示。
2.1.2 骨架系統生成及關節點坐標表示
通過人物控制與骨骼點的綁定,可實現模型與人物的同步,也可以間接地獲取關節點的三維坐標。識別出20個關節點位置,可以生成相應的骨架系統。
關節點的三維坐標獲取方式采用場景物體獲取函數GameObject.Find(),將Kinect空間位置信息轉換為三維坐標信息。
2.2 骨關節空間角度計算
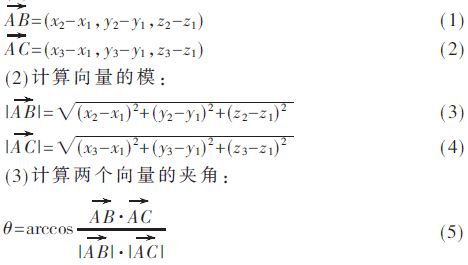
骨關節空間角度的計算是依據獲取的關節點三維坐標,根據空間向量夾角公式進行計算。如圖3所示,假設A、B、C分別代表3個相鄰關節點的空間坐標,以計算關節點A的空間角度為例,具體操作步驟如下:
(1)計算A與相鄰兩點B、C組成的空間向量:
2.3 骨關節功能分類評估
功能分類算法很多,常用的如K-medoids[6]、CLARANS[7]、K-means[8]等。考慮到骨關節功能龐大的數據量,系統采用更適合大數據集分析的K-means聚類算法,首先對正常的骨關節數據進行分析,得出標準的數據范圍[9],再以正常的數據范圍為分析比對的標準,對不同關節狀況的骨關節角度數據進行收集整理。
其中,K-means算法以距離為分類的標準,根據某個距離函數完成分類,本系統以歐式距離為距離準則函數,完成整體數據的聚類。在此過程中,每次分類都將重新確定一次聚類中心,其新的聚類中心使用取樣本均值的方法進行計算,具體如式(6)所示:
式中,zj表示當前類別j的均值結果,n表示類別的樣本數量,xi表示類別j的某一樣本數值。
系統采用誤差平方和作為目標函數,即誤差準則函數,具體定義如式(7)所示:
式中,E表示對應類別的誤差平方和;k為聚類類別數;n表示類別j的樣本數量;xi表示類別j的某一樣本數值;zj表示類別j的均值結果;d為數據xi和zj的偏差平方和,即(xi-zj)2值。最后將k個類別的誤差平方和相加即為總體誤差平方和E。
聚類效果評估采用purity、RI與F-meaures[10]等指標,其中purity是計算正確聚類的樣本數占總樣本數的比例,RI是指度量正確的百分比,而F-measure由Precision(查準率)和Recall(查全率)兩個指標組合而。假設Fi為每個分類的F-measure值,Pi為每個分類的查準率,Ri為每個分類的查全率,則Fi的計算公式如式(8)所示。
總的F值由每個分類Fi的加權平均得到。
3 系統實驗與結果
3.1 數據測試與分析
利用骨關節空間角度測量方法,實測66例健康骨關節角度數據。通過對骨關節活動狀態的分析,確定正常人群關節角度屈伸范圍,如表1所示。它們可以作為后期正常樣本的功能分類標準。

在66例健康骨關節屈伸數據分析基礎上,增加測試數據至152例,通過聚類程序分析這152例數據。圖4所示為以左膝關節為代表的聚類結果,其中橫軸為伸展角度,縱軸為屈曲角度,數據被分為三類,分別是正常的一類、屈伸角度不足的一類、伸展角度不足的一類。
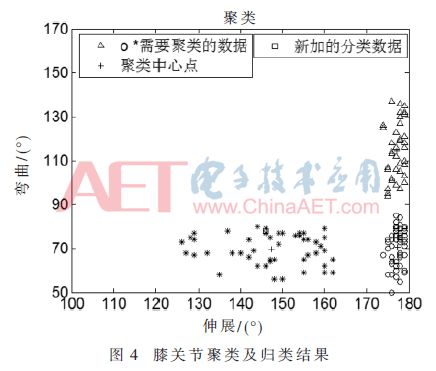
添加需要歸類的新樣本數據,會在分類基礎上進行歸類判定,如圖4中以“□”號表示參與歸類的新的測量數據。
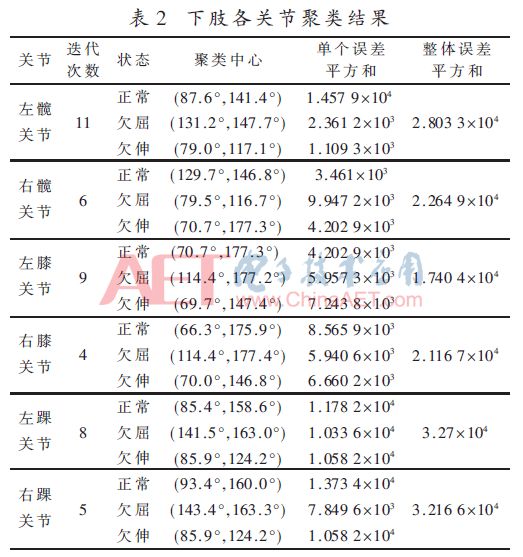
以相同方式,利用上述K-means聚類算法可以完成其他下肢關節樣本數據的聚類分析。表2記錄了人體下肢各關節角度數據的具體分類情況,包括各關節類別,聚類過程中的迭代次數、狀態、聚類中心、單個誤差平方和以及整體誤差平方和。其中單個誤差平方和可以反映每一個聚類結果的差異性,整體誤差平方和可以判斷不同聚類結果的樣本差異。
3.2 功能分類算法驗證
對下肢每一個關節測試并記錄正常、欠屈和欠伸3種情況下各10組數據,一共30組數據,在聚類結果數據中輸入測試的數據,完成對數據的歸類,驗證測試結果如表3所示。
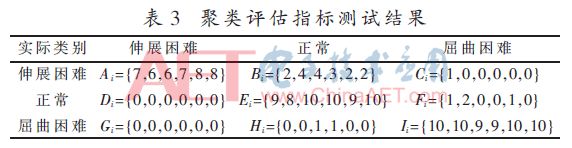
表3中Ai~Ii分別為各個關節角度數據的測試結果情況,其中i={1,2,3,4,5,6}分別對應了左髖關節、右髖關節、左膝關節、右膝關節、左踝關節、右踝關節的數據測試結果,如A1~I1代表的是左髖關節的數據測試結果。結果表明10個伸展困難的樣本中,有7個被正確歸類,2個被錯誤地歸類到正常,1個被錯誤地歸類到屈曲困難;10個正常的測試樣本中,有9個被正確歸類,1個被錯誤地歸類到屈曲困難;10個屈曲困難的測試樣本完全正確歸類于屈曲困難類。
結合聚類評估原理之中涉及的計算方法,可以計算相應關節的聚類指標,各關節聚類評估指標結果如表4所示。
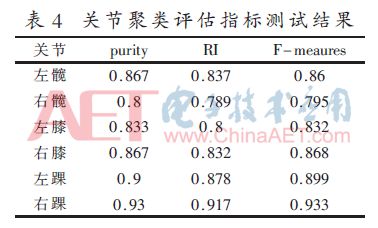
由表4可知,利用K-means聚類算法能較好地完成骨關節空間角度數據的聚類和樣本歸類,以左髖關節數據的聚類分析和指標計算為例,3個聚類指標的值分別為0.867、0.837、0.86,即該關節數據的聚類準確度穩定在0.83以上。就整個系統來而言,所有關節聚類評估準確度能穩定在0.8及其以上。
3.3 系統測試
系統最終以Unity為開發平臺,運用C#編程方式,連接Kinect,實時采集數據并進行骨關節功能評估,圖5所示為系統測試界面圖。
圖5所示的系統測試結果圖中包括Kinect圖像實時采集與顯示,以及下肢左右髖關節、膝關節、踝關節空間角度顯示與功能評估等部分。系統能夠實時獲取關節點之間的角度并進行最大屈伸數據的更新記錄,適用于多種參數的系統聚類,且可視化強,能夠非接觸地完成骨關節空間角度功能的數字化評估。
4 結論
本文研究了一種非接觸的骨關節空間角度測量方法,并介紹了骨關節空間角度數字化評估系統的結構和工作原理。實驗結果證明:系統以可視化方式為用戶呈現骨關節功能的數字化分析與功能評估結果;聚類評估指標purity、RI與F-meaures等能穩定在0.8及其以上,基本滿足骨關節空間角度數字化評估要求,可以為醫務人員在診斷、治療方案確立、治療前后功能對比評價以及康復指導等過程提供一種更客觀有效的依據。
-
控制系統
+關注
關注
41文章
6779瀏覽量
112096 -
數據采集
+關注
關注
40文章
7150瀏覽量
116373 -
數字化
+關注
關注
8文章
9500瀏覽量
63464
原文標題:【學術論文】骨關節角度數字化測量與功能評估系統設計
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監

評論