 淺析自動駕駛核心技術的路徑規劃
淺析自動駕駛核心技術的路徑規劃
無人車的技術路線實際早已確定,那就是輪式機器人的技術路線。這已經從2007年的DARPA大賽到谷歌福特百度的無人車,超過十年的驗證,輪式機器人技術完全適用于無人車。目前所有無人車基礎算法的研究都源自機器人技術。
首先來說明三個概念,路徑規劃、避障規劃、軌跡規劃。
路徑規劃通常指全局的路徑規劃,也可以叫全局導航規劃,從出發點到目標點之間的純幾何路徑規劃,無關時間序列,無關車輛動力學。
避障規劃又叫局部路徑規劃,又可叫動態路徑規劃,也可以叫即時導航規劃。主要是探測障礙物,并對障礙物的移動軌跡跟蹤(Moving Object Detection and Tracking ,一般縮寫為MODAT)做出下一步可能位置的推算,最終繪制出一幅包含現存碰撞風險和潛在碰撞風險的障礙物地圖,這個潛在的風險提示是100毫秒級,未來需要進一步提高,這對傳感器、算法的效率和處理器的運算能力都是極大的挑戰,避障規劃不僅考慮空間還考慮時間序列,在復雜的市區運算量驚人,可能超過30TFLOPS,這是無人車難度最高的環節。未來還要加入V2X地圖,避障規劃會更復雜,加入V2X地圖,基本可確保無人車不會發生任何形式的主動碰撞。
軌跡規劃則源自機器人研究,通常是說機械臂的路徑規劃。在無人車領域,軌跡規劃的定義感覺不統一。有人將避障規劃與軌跡規劃混淆了。軌跡規劃應該是在路徑規劃和避障規劃的基礎上,考慮時間序列和車輛動力學對車輛運行軌跡的規劃,主要是車縱向加速度和車橫向角速度的設定。將設定交給執行系統,轉向、油門、剎車。如果有主動懸掛,那么軌跡規劃可能還要考慮地形因素。
三大規劃是無人車最復雜的部分,算法多不勝數,讓人眼花繚亂,這也是百度、谷歌和蘋果科技巨頭要切入無人車領域的主要原因,這些科技巨頭最擅長的就是算法的優化整合。當然傳統車廠如福特和豐田,擁有對車輛動力學的絕對優勢,在此領域實力并不比科技巨頭要差,尤其是豐田,從開源SLAM到KITTI,軟件實力絲毫不次于谷歌。
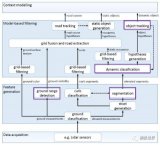
全局型路徑規劃不算復雜,前提是有拓撲級地圖,這對地圖廠家來說很容易的。對于非地圖廠家是有點麻煩的,不過只能算小麻煩。所以我們重點講避障規劃,避障規劃的前提是對周圍環境有深刻的理解,有一個非常完善實時的的環境理解。
有了環境模型(不同于環境理解),在加上路徑搜索就構成了路徑規劃。通常環境模型是三大類,分別是柵格法、可視圖法、自由空間法。路徑搜索的算法就多了,Dijkstra、Floyd-Warshall、A+算法、層次法、動作行為法、勢場域法、柵格法、模糊邏輯法、拓撲法、懲罰函數法、遺傳算法、模擬退火法、蟻群法和神經網絡法等。需要指出的是,大多數算法都是誕生于六十年代。
這還僅僅是2D層面的,3D層面的將更加復雜。每一種算法下面還有再細分的算法,讓人看了頭暈目眩。因為很少有文獻說3D路徑算法,我們就多說幾句,3D路徑算法大體可以分為五類,取樣算法(Sampling)、節點算法(Node)、工程數學模型算法(Mathematics)、仿生學算法(Bioinspired)、混合算法(MultiFusion)。以取樣型算法為例,下面可以再分主動型與被動型。主動型下面還可以再細分。
節點型算法下面再分三大類。
環境建模方面,柵格法是公認最成熟的算法,柵格法應該也是安全系數最高的算法,也是最耗運算資源的算法。不過無人車要考慮安全,安全是第一位的,成本是第二位的,同時有英偉達和英特爾這樣的半導體巨人在不斷提高運算性能,運算資源不用過多考慮。
柵格法把工作空間分割成規則而均勻的含二值信息的柵格。在機器人移動的過程中,柵格的尺寸和位置不變。二值信息分別表示該柵格處是否有障礙,沒有障礙的柵格稱為自由柵格,否則為障礙柵格。柵格的尺寸通常和機器人的基本移動步長相適應,故機器人移動轉化成從一個自由柵格移動到下一個自由柵格,機器人移動的路長對應于機器人爬過的柵格數。柵格法直觀且建模相對較容易,因此得到了廣泛的應用。
另外兩種算法,可視圖法和自由空間法和柵格法相比的優點是比較靈活,對運算資源消耗少。缺點很明顯,障礙物多少與算法復雜程度成正比,算法太復雜時可靠性就降低,同時不太適合動態環境,要求運動速度變化盡量小。柵格法的缺點是如果分辨率高,對運算資源和內存需求較高。顯然,可視圖法和自由空間發適合機器人,柵格法更適合無人車,這在業內差不多已經是定論。這和傳感器也有部分關系,視覺系統難以適應太精細的格柵法,因為視覺系統的要做精細的定量邊界分割是不可能的,而激光雷達非常適合柵格法。
Dijkstra(迪杰斯特拉)算法是最短路算法的經典算法之一,由E.W.Dijkstra在1959年提出的。該算法適于計算道路權值均為非負的最短路徑問題,可以給出圖中某一節點到其他所有節點的最短路徑,以思路清晰,搜索準確見長。相對的,由于輸入為大型稀疏矩陣,又具有耗時長,占用空間大的缺點。
軌跡規劃則研究的很少,因為大部分科技公司都沒能力在車輛動力學領域一展拳腳。科技公司都將精力花在如何生成軌跡上,而對于生成的軌跡是否滿足運動學約束、側滑約束以及執行機構約束,即軌跡的可行性,研究相對較少。對于無人車這一受非完整性約束的系統,研究人員通常基于車體模型進行軌跡規劃。按照車體模型的精確程度,軌跡規劃方法可以進一步分為基于模型預測控制(Model predictive control, MPC) 以及基于幾何軌線的規劃方法。基于模型預測的無人車軌跡規劃方法首先由 Kelly A和Nagy B(有點奇怪的名字) 提出。
對于移動機器人來說,軌跡生成問題主要研究如何生成一系列動作,使得機器人由初始狀態到達目標狀態。對于無人車來說,其初始狀態包括其二維坐標(x, y)、 航向角 ψ 以及曲率 κ。
實際情況遠比這復雜,還需要建立大量的數學方程。良好的規劃必須建立對周邊環境,尤其是動態環境的深刻理解。
-
機器人技術
+關注
關注
18文章
193瀏覽量
31618 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166392
原文標題:自動駕駛核心技術之路徑規劃
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論