 直流電機會永遠不失步嗎? 淺談直流電機的失步現象
直流電機會永遠不失步嗎? 淺談直流電機的失步現象
本文主要是關于直流電機的相關介紹,并著重對直流電機失步現象進行了詳盡的闡述。
直流電機
直流電機(direct current machine)是指能將直流電能轉換成機械能(直流電動機)或將機械能轉換成直流電能(直流發電機)的旋轉電機。它是能實現直流電能和機械能互相轉換的電機。當它作電動機運行時是直流電動機,將電能轉換為機械能;作發電機運行時是直流發電機,將機械能轉換為電能。
組成結構
直流電機的結構應由定子和轉子兩大部分組成。直流電機運行時靜止不動的部分稱為定子,定子的主要作用是產生磁場,由機座、主磁極、換向極、端蓋、軸承和電刷裝置等組成。運行時轉動的部分稱為轉子,其主要作用是產生電磁轉矩和感應電動勢,是直流電機進行能量轉換的樞紐,所以通常又稱為電樞,由轉軸、電樞鐵心、電樞繞組、換向器和風扇等組成。
定子
(1)主磁極
主磁極的作用是產生氣隙磁場。主磁極由主磁極鐵心和勵磁繞組兩部分組成。
鐵心一般用0.5mm~1.5mm厚的硅鋼板沖片疊壓鉚緊而成,分為極身和極靴兩部分,上面套勵磁繞組的部分稱為極身,下面擴寬的部分稱為極靴,極靴寬于極身,既可以調整氣隙中磁場的分布,又便于固定勵磁繞組。勵磁繞組用絕緣銅線繞制而成,套在主磁極鐵心上。整個主磁極用螺釘固定在機座上,
(2)換向極
換向極的作用是改善換向,減小電機運行時電刷與換向器之間可能產生的換向火花,一般裝在兩個相鄰主磁極之間,由換向極鐵心和換向極繞組組成。換向極繞組用絕緣導線繞制而成,套在換向極鐵心上,換向極的數目與主磁極相等。
(3)機座
電機定子的外殼稱為機座。機座的作用有兩個:
一是用來固定主磁極、換向極和端蓋,并起整個電機的支撐和固定作用;
二是機座本身也是磁路的一部分,借以構成磁極之間磁的通路,磁通通過的部分稱為磁軛。為保證機座具有足夠的機械強度和良好的導磁性能,一般為鑄鋼件或由鋼板焊接而成。
(4)電刷裝置
電刷裝置是用來引入或引出直流電壓和直流電流的。電刷裝置由電刷、刷握、刷桿和刷桿座等組成。電刷放在刷握內,用彈簧壓緊,使電刷與換向器之間有良好的滑動接觸,刷握固定在刷桿上,刷桿裝在圓環形的刷桿座上,相互之間必須絕緣。刷桿座裝在端蓋或軸承內蓋上,圓周位置可以調整,調好以后加以固定。
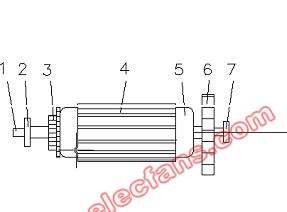
轉子
(1)電樞鐵心
電樞鐵心是主磁路的主要部分,同時用以嵌放電樞繞組。
一般電樞鐵心采用由0.5mm厚的硅鋼片沖制而成的沖片疊壓而成,以降低電機運行時電樞鐵心中產生的渦流損耗和磁滯損耗。疊成的鐵心固定在轉軸或轉子支架上。鐵心的外圓開有電樞槽,槽內嵌放電樞繞組。
(2)電樞繞組
電樞繞組的作用是產生電磁轉矩和感應電動勢,是直流電機進行能量變換的關鍵部件,所以叫電樞。它是由許多線圈(以下稱元件)按一定規律連接而成,線圈采用高強度漆包線或玻璃絲包扁銅線繞成,不同線圈的線圈邊分上下兩層嵌放在電樞槽中,線圈與鐵心之間以及上、下兩層線圈邊之間都必須妥善絕緣。為防止離心力將線圈邊甩出槽外,槽口用槽楔固定。線圈伸出槽外的端接部分用熱固性無緯玻璃帶進行綁扎。
(3)換向器
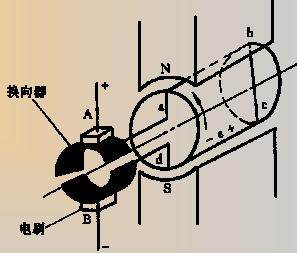
在直流電動機中,換向器配以電刷,能將外加直流電源轉換為電樞線圈中的交變電流,
使電磁轉矩的方向恒定不變;在直流發電機中,換向器配以電刷,能將電樞線圈中感應產生的交變電動勢轉換為正、負電刷上引出的直流電動勢。換向器是由許多換向片組成的圓柱體,換向片之間用云母片絕緣。
(4)轉軸
轉軸起轉子旋轉的支撐作用,需有一定的機械強度和剛度,一般用圓鋼加工而成。
主要分類
直流發電機
直流發電機是把機械能轉化為直流電能的機器。它主要作為直流電動機、電解、
電鍍、電冶煉、充電及交流發電機的勵磁電源等所需的直流電機。雖然在需要直流電的地方,也用電力整流元件,把交流電轉換成直流電,但從某些工作性能方面來看,交流整流電源還不能完全取代直流發電機。
直流電動機
將直流電能轉換為機械能的轉動裝置。電動機定子提供磁場,直流電源向轉子的繞組提供電流,換向器使轉子電流與磁場產生的轉矩保持方向不變。根據是否是否配置有常用的電刷-換向器可以將直流電動機分為兩類,包括有刷直流電動機和無刷直流電動機。
無刷直流電機是近幾年來隨著微處理器技術的發展和高開關頻率、
低功耗新型電力電子器件的應用,以及控制方法的優化和低成本、高磁能級的永磁材料的出現而發展起來的一種新型直流電動機。
無刷直流電機既保持了傳統直流電機良好的調速性能又具有無滑動接觸和換向火花、可靠性高、使用壽命長及噪聲低等優點,因而在航空航天、數控機床、機器人、電動汽車、計算機外圍設備和家用電器等方面都獲得了廣泛應用。
按照供電方式的不同,無刷直流電機又可以分為兩類:方波無刷直流電動機,其反電勢波形和供電電流波形都是矩形波,又稱為矩形波永磁同步電動機;正弦波無刷直流電動機,其反電勢波形和供電電流波形均為正弦波。
直流電機會永遠不失步嗎
說起步進電機,對于電氣控制行業的工程師來說應該再熟悉不過了!它的誤差不會長期積累,能夠實現精確定位,控制比伺服簡單等優點,但步進電機精確控制的前提是電機不發生失步,如何才能避免步進電機失步?
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制電機。在未發生失步情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數并不受負載變化的影響,當步進電機接收到一個脈沖信號時,電機就按設定的方向轉一個固定的角度(步進角或步距角),通過控制脈沖數和脈沖頻率來控制電機角位移量及電機轉速從而達到精確的開環控制。另外,步進電機每走一步所轉過的角度與理論步距之間總有一定的誤差,從某一步到任何一步,也總有一定的誤差,但是,步進電機每轉一周的步數相同,在不失步的情況下,其步距誤差不會長期累積。
上面提到的都是在不失步的情況,如何才能避免失步呢?首先我們需要知道造成電機失步的因素:
1、轉子加速度慢于步進電機的旋轉磁場;
2、轉子的平均速度高于定子磁場的平均旋轉速度;
3、電機負載慣性較大;
4、步進電機產生共振。
轉子加速度慢于步進電機的旋轉磁場即轉子速度低于換相速度時,電機會產生失步,這是因為輸入電機的電能不足,產生的力矩無法使轉子速度跟上定子磁場的旋轉速度,從而引起失步。轉子平均速度高于定子磁場平均旋轉速度,這是定子通電勵磁的時間較長,大于步進所需的時間,轉子在步進過程中獲得過多的能量,導致電機產生的轉矩過大從而引起電機越步。
以上導致步進電機失步的原因實質是步進電機驅動器選擇不當而導致,只有選擇正確合適的步進驅動器才能使步進電機發揮其控制精確的優勢。選擇合適的驅動器需要根據電機的電流,配用大于或等于此電流的驅動器。如果需要低振動或高精度時,可配用細分型驅動器。對于大轉矩電機,盡可能用高電壓型驅動器,以獲得良好的高速性能。同時對于驅動電源,很多人直接使用開關電源作為驅動電源,但是,一般不要使用開關電源,特別是大力矩電機,除非選用比需要的功率大一倍以上的開關電源。因為,電機工作時是大電感型負載,會對電源端形成瞬間的高壓。而開關電源的過載性能不好,會保護關斷,且其精密的穩壓性能又不需要,有時可能造成開關電源和驅動器的損壞。對于步進電機的驅動電源,可以用常規的環形或R 型變壓器變壓的直流電源。
步進電機產生共振是因為電機接收的脈沖頻率等于步進電機的固有頻率,該頻率與驅動器的細分有關系。我們一般使用步進電機時,驅動器的細分能力很重要,共振范圍越小越好。對于電機負載慣性較大是由于電機超載而引起,因此在使用時只需注意不要讓電機過載即可避免。
步進電機和驅動器的選取
步進電機和驅動器的選擇方法比較多,但選擇步進電機應遵循先選電機后選步進電機驅動器原則,先明確負載特性,再通過比較不同型號步進電機的靜力矩和矩頻曲線,找到與負載特性最匹配的步進電機。東么川工程師給您推薦以下幾點步進電機選擇方法:
1、 步過電機轉速的選擇對于電機的轉速也要特別考慮。因為,電機的輸出轉矩,與轉速成反比。就是說,步進電機在低速(每分鐘幾百轉或更低轉速,其輸出轉矩較大),在高速旋轉狀態的轉矩(1000轉/分--9000轉)就很小了。當然,有些工況環境需要高速電機,就要對步進電動機的線圈電阻、電感等指標進行衡量。選擇電感稍小一些的電機,作為高速電機,能夠獲得較大輸出轉矩。反之,要求低速大力矩的情況下,就要選擇電感在十幾或幾十mH,電阻也要大一些為好。
2、 步進電機轉矩的選擇步進電機的保持轉矩,近似于傳統電機所稱的“功率”。當然,有著本質的區別。步進電動機的物理結構,完全不同于交流、直流電機,電機的輸出功率是可變的。通常根據需要的轉矩大小(即所要帶動物體的扭力大小),來選擇哪種型號的電機。大致說來,扭力在0.8N.m以下,選擇20、28、35、42(電機的機身直徑或方度,單位:mm);扭力在1N.m左右的,選擇57電機較為合適。扭力在幾個N.m或更大的情況下,就要選擇86、110、130等規格的步進電機。
3、 步進電機的相數選擇步進電機的相數選擇,這項內容,很多客戶幾乎沒有什么重視,大多是隨便購買。其實,不同相數的電機,工作效果是不同的。相數越多,步距角就能夠做的比較小,工作時的振動就相對小一些。大多數場合,使用兩相電機比較多。在高速大力矩的工作環境,選擇三相步進電機是比較實用的。
4、 步進電機空載起動頻率的選擇步進電機空載起動頻率,通常稱為“空起頻率”。這是選購電機比較重要的一項指標。如果要求在瞬間頻繁啟動、停止,并且,轉速在1000轉/分鐘左右(或更高),通常需要“加速啟動”。如果需要直接啟動達到高速運轉,最好選擇反應式或永磁電機。這些電機的“空起頻率”都比較高。
5、 針對步進電機使用環境來選擇特種步進電機能夠防水、防油,用于某些特殊場合。例如水下機器人,就需要放水電機。對于特種用途的電機,就要針對性選擇了。
對步進電機非常了解的人都知道,這種電機的力矩是會隨著轉速的升高而下降的,同時也都清楚這種電機在低速時可以正常運轉,但是在運轉速度高出一定的數值之后,就有可能出現無法啟動的現象。
這是因為步進電機有空載啟動頻率這個重要的技術參數,指的是電機在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于這個參數數值,電機就不能正常啟動,容易發生失步或堵轉現象。尤其是在電機本身有負載的情況下,啟動頻率會更低,否則以較高的速度啟動,電機無法正常運行使用。
如果使用當中必須要使電機達到高速轉動,那么在脈沖頻率方面就應該有一個加速過程,不能一開始啟動的時候直接得到很高的脈沖頻率。具體來說就是大家在啟動電機的時候采取用較低的頻率,等到電機正常啟動運轉之后,再按一定加速度升到所希望的高頻,以電機由低速升到高速的過程,來滿足電機高速轉動運行需求。
所以,大家在使用步進電機的時候,一定要注意對其做好啟動運行操作,避免出現高速無法啟動電機這類現象。
步進電機失步產生的原因以及解決的方法
(1)、轉子的加速度慢于步進電動機的旋轉磁場(轉子的力 n 速度慢于步進電動機的旋轉磁場,即低于換相速度時,步進電動機會產生失步)。
原 因:輸入電動機的電能不足,在步進電動機中產生的同步力矩無法使轉子速度跟隨定子磁場的旋轉速度,從而引起失步。由于步進電動機的動態輸出轉矩隨著連續運行頻率的上升而降低,因而,凡是比該頻率高的工作頻率都將產生丟步。這種失步說明步進電動機的轉矩不足,拖動能力不夠。
解決方法:
①使步進電動機本身產生的電磁轉矩增大。
a.可在額定電流范圍內適當加大驅動電流;
b.在高頻范圍轉矩不足時,可適當提高驅動電路的驅動電壓;
c.改用轉矩大的步進電動機等。
②使步進電動機需要克服的轉矩減小。
a.可適當降低電動機運行頻率,以便提高電動機的輸出轉矩;
b.設定較長的加速時間,以便轉子獲得足夠的能量。
(2)、轉子的平均速度高于定子磁場的平均旋轉速度(轉子的平均速度高于定子磁場的平均旋轉速度,這時定子通電勵磁的時間較長,大于轉子步進一步所需的時間,則轉子在步進過程中獲得了過多的能量,使得步進電動機產生的輸出轉矩增大,從而使電動機越步。當用步進電動機驅動那些使負載上、下動作的機構時,更易產生越步現象)
原 因:負載向下運動時,電動機所需的轉矩減小。
解決方法:減小步進電動機的驅動電流,以便降低步進電動機的輸出轉矩。
(3)、步進電動機及所帶負載存在慣性
原 因:步進電動機自身及所帶負載存在慣性,使得電動機在工作過程中不能立即起動和停止,而是在起動時出現丟步,在停止時發生越步。
解決方法:通過一個加速和減速過程,即以較低的速度起動,而后逐漸加速到某一速度運行,再逐漸減速直至停止。進行合理、平滑的加減速控制是保證步進驅動系統可靠、高效、精確運行的關鍵
(4)、步進電動機產生共振
原 因:共振(步進電動機處于連續運行狀態時,如果控制脈沖的頻率等于步進電動機的固有頻率,將產生共振。在一個控制脈沖周期內,振動得不到充分衰減,下一個脈沖就來到,因而在共振頻率附近動態誤差最大并會導致步進電動機失步)。
解決方法:①適當減小步進電動機的驅動電流;②采用細分驅動方法;③采用阻尼方法,包括機械阻尼法。
結語
關于直流電機的相關介紹就到這了,如有不足之處歡迎指正。
-
直流電機
+關注
關注
36文章
1710瀏覽量
70228 -
步進電機
+關注
關注
150文章
3113瀏覽量
147574
發布評論請先 登錄
相關推薦
永磁直流電機的原理和設計與定制

無刷直流電機與有刷直流電機的區別






 工商網監
工商網監
評論