") 基于圖像的微分的:一階微分和二階微分(拉普拉斯算子)
基于圖像的微分的:一階微分和二階微分(拉普拉斯算子)
前面介紹的幾種濾波器都屬于平滑濾波器(低通濾波器),用來(lái)平滑圖像和抑制噪聲的;而銳化空間濾波器恰恰相反,主要用來(lái)增強(qiáng)圖像的突變信息,圖像的細(xì)節(jié)和邊緣信息。平滑濾波器主要是使用鄰域的均值(或者中值)來(lái)代替模板中心的像素,消弱和鄰域間的差別,以達(dá)到平滑圖像和抑制噪聲的目的;相反,銳化濾波器則使用鄰域的微分作為算子,增大鄰域間像素的差值,使圖像的突變部分變的更加明顯。
本位主要介紹了一下幾點(diǎn)內(nèi)容:
圖像的一階微分和二階微分的性質(zhì)
幾種常見(jiàn)的一階微分算子
二階微分算子 - Laplace 拉普拉斯算子
一階微分算子和二階微分算子得到邊緣的對(duì)比
一階微分和二階微分的性質(zhì)
既然是基于一階微分和二階微分的銳化空間濾波器,那么首先就要了解下一階和二階微分的性質(zhì)。
圖像的銳化也就是增強(qiáng)圖像的突變部分,那么我們也就對(duì)圖像的恒定區(qū)域中,突變的開(kāi)始點(diǎn)與結(jié)束點(diǎn)(臺(tái)階和斜坡突變)及沿著灰度斜坡處的微分的性質(zhì)。微分是對(duì)函數(shù)局部變化率的一種表示,那么對(duì)于一階微分有以下幾個(gè)性質(zhì):
在恒定的灰度區(qū)域,圖像的微分值為0.(灰度值沒(méi)有發(fā)生變換,自然微分為0)
在灰度臺(tái)階或斜坡起點(diǎn)處微分值不為0.(臺(tái)階是,灰度值的突變變化較大;斜坡則是灰度值變化較緩慢;灰度值發(fā)生了變化,微分值不為0)
沿著斜坡的微分值不為0.
二階微分,是一階微分的導(dǎo)數(shù),和一階微分相對(duì)應(yīng),也有以下幾點(diǎn)性質(zhì):
在恒定區(qū)域二階微分值為0
在灰度臺(tái)階或斜坡的起點(diǎn)處微分值不為0
沿著斜坡的微分值為0.
從以上圖像灰度的一階和二階微分的性質(zhì)可以看出,在灰度值變化的地方,一階微分和二階微分的值都不為0;在灰度恒定的地方,微分值都為0.也就是說(shuō),不論是使用一階微分還是二階微分都可以得到圖像灰度的變化值。
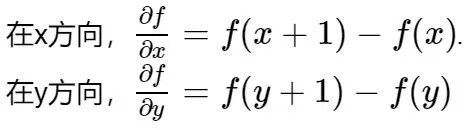
圖像可以看著是二維離散函數(shù),對(duì)于圖像的一階微分其計(jì)算公式如下:
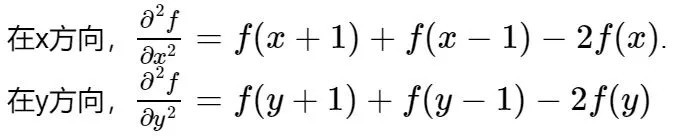
對(duì)于二階微分有:
對(duì)于圖像邊緣處的灰度值來(lái)說(shuō),通常有兩種突變形式:
? 邊緣兩邊圖像灰度差異較大,這就形成了灰度臺(tái)階。在臺(tái)階處,一階微分和二階微分的值都不為0.
? 邊緣兩邊圖像灰度變化不如臺(tái)階那么劇烈,會(huì)形成一個(gè)緩慢變換的灰度斜坡。在斜坡的起點(diǎn)和終點(diǎn)一階微分和二階微分的值都不為0,但是沿著斜坡一階微分的值不為0,而二階微分的值為0.
對(duì)于圖像的邊緣來(lái)說(shuō),通常會(huì)形成一個(gè)斜坡過(guò)度。一階微分在斜坡處的值不為0,那么用其得到的邊緣較粗;而二階微分在斜坡處的值為0,但在斜坡兩端值不為0,且值得符號(hào)不一樣,這樣二階微分得到的是一個(gè)由0分開(kāi)的一個(gè)像素寬的雙邊緣。也就說(shuō),二階微分在增強(qiáng)圖像細(xì)節(jié)方面比一階微分好得多,并且在計(jì)算上也要比一階微分方便。
梯度圖
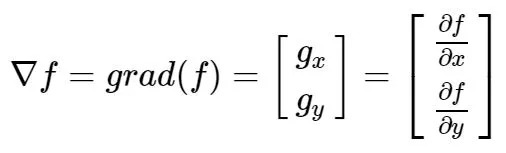
在圖像處理中的一階微分通常使用梯度的幅值來(lái)實(shí)現(xiàn)。對(duì)于圖像 f ( x , y ) ,f在坐標(biāo) ( x , y ) 處的梯度是一個(gè)列向量
該向量表示圖像中的像素在點(diǎn) ( x , y ) 處灰度值的最大變化率的方向。向量 ?f 的幅值就是圖像 f ( x , y ) 的梯度圖,記為M(x,y)

M ( x , y ) 是和原圖像 f( x , y ) 同大小的圖像。由于求平方的根運(yùn)算比較費(fèi)時(shí),通常可以使用絕對(duì)值的和來(lái)近似

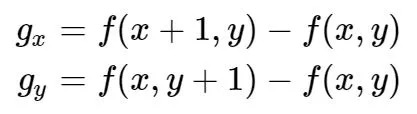
從上面可以看出,要得到圖像的梯度圖,有以下步驟:
? 圖像在 x 方向的梯度 gx ? 圖像在 y 方向的梯度 gy ? M ( x , y ) =∣gx∣+∣gy∣
一階梯度算子
圖像是以離散的形式存儲(chǔ),通常使用差分來(lái)計(jì)算圖像的微分,常見(jiàn)的計(jì)算梯度的模板有以下幾種
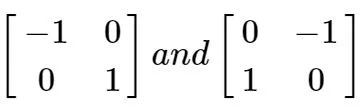
? 根據(jù)梯度的定義
可以得到模板 [ ?1 1 ] 和 使用該方法計(jì)算的圖像的梯度只是考慮單個(gè)像素的差值,并沒(méi)有利用到圖像的像素的鄰域特性。
使用該方法計(jì)算的圖像的梯度只是考慮單個(gè)像素的差值,并沒(méi)有利用到圖像的像素的鄰域特性。
? Robert交叉算子
在圖像處理的過(guò)程中,不會(huì)只單獨(dú)的對(duì)圖像中的某一個(gè)像素進(jìn)行運(yùn)算,通常會(huì)考慮到每個(gè)像素的某個(gè)鄰域的灰度變化。因此,通常不會(huì)簡(jiǎn)單的利用梯度的定義進(jìn)行梯度的計(jì)算,而是在像素的某個(gè)鄰域內(nèi)設(shè)置梯度算子。考慮,3×3 區(qū)域的像素,使用如下矩陣表示:
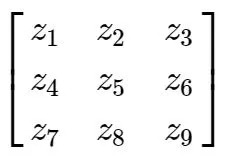
令中心點(diǎn) z5表示圖像中任一像素,那么根據(jù)梯度的定義,z5在在 x 和 y 方向的梯度分別為:gx=z9?z5和gy=z8?z6,梯度圖像 M ( x , y )

根據(jù)上述公式,Robert在1965年提出的Robert交叉算子
? Sobel算子
Robert交叉算子的尺寸是偶數(shù),偶數(shù)尺寸濾波器沒(méi)有對(duì)稱(chēng)中心計(jì)算效率較低,所以通常濾波器的模板尺寸是奇數(shù)。仍以3×3 為例,以 z5為對(duì)稱(chēng)中心(表示圖像中的任一像素),有

利用上述公式可以得到如下兩個(gè)卷積模板,分別計(jì)算圖像在 x 和 y 風(fēng)向的梯度
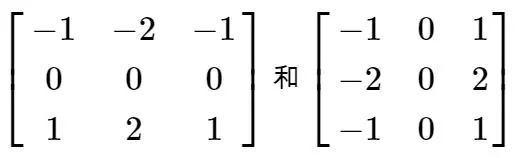
第一個(gè)模板,第三行和第一行的差近似x方向的偏微分;第二個(gè)模板,第三列和第一列的差近似y方向的偏微分,而且模板的所有系數(shù)只和為0,表示恒定灰度區(qū)域的響應(yīng)為0.
基于OpenCV的一階梯度算子實(shí)現(xiàn)
? Sobel算子
在OpenCV中封裝了Sobel算子,其函數(shù)為Sobel。使用Sobel能夠很方便的計(jì)算任意尺寸的x和y方向的偏微分,具體如下:
void sobel_grad(const Mat &src, Mat &dst) { Mat grad_x, grad_y; Sobel(src, grad_x, CV_32F, 1, 0); Sobel(src, grad_y, CV_32F, 0, 1); //convertScaleAbs(grad_x, grad_x); //convertScaleAbs(grad_y, grad_y); //addWeighted(grad_x, 0.5, grad_y, 0.5, 0, dst); magnitude(grad_x, grad_y, dst); convertScaleAbs(dst, dst); }
上述代碼中調(diào)用Sobel分別得到圖像在x和y方向的偏微分 gx和 gy,然后相加得到得到圖像的梯度圖。
其余的幾個(gè)函數(shù)說(shuō)明,convertScaleAbs將圖像類(lèi)型轉(zhuǎn)換為CV_8U;addWeighted按一定的權(quán)值將兩個(gè)圖像相加;magnitude求兩個(gè)圖像的幅值,其公式為
,具體的參數(shù)說(shuō)明可參考OpenCV的官方文檔。
? 基于定義和Robert交叉算子的計(jì)算
對(duì)于這兩種算子,OpenCV中并沒(méi)有提供具體的函數(shù),不過(guò)可以利用filter2D函數(shù)來(lái)實(shí)現(xiàn)。filter2D是OpenCV中對(duì)圖像進(jìn)行卷積運(yùn)算的一個(gè)很重要的函數(shù),該函數(shù)能夠使用任意的線性卷積核對(duì)圖像進(jìn)行卷積運(yùn)算。
void robert_grad(const Mat& src, Mat &dst) { Mat grad_x, grad_y; Mat kernel_x = (Mat_
構(gòu)造好Robert交叉算子,然后調(diào)用filter2D即可;基于定義的計(jì)算方法于此類(lèi)似,不在贅述。
結(jié)果三種方法計(jì)算得到的梯度圖,如下:
從上面結(jié)果可以看出,Robert交叉算子和基于定義得到的邊緣圖,得到的邊緣較細(xì)并且不是很連續(xù);Sobel得到邊緣較粗,線條連續(xù),效果明顯好于其他的兩種算子。
二階微分算子 - LapLace 拉普拉斯算子
二階微分算子的代表就是拉普拉斯算子,其定義如下:
其中:
對(duì)于上述的 3×3 區(qū)域,則有

其得到的模板如下:
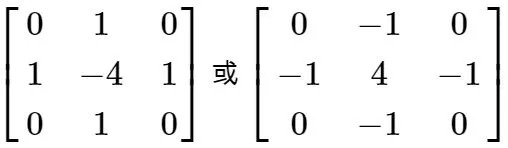
注意,模板中心的符號(hào),并且模板的所有系數(shù)之和為0.
在OpenCV中有對(duì)LapLace的封裝,其函數(shù)為L(zhǎng)aplacian,其使用的模板中心的系數(shù)為負(fù),具體參數(shù)說(shuō)明參見(jiàn)OpenCV文檔,其得到的邊緣圖和一階微分算子得到邊緣圖對(duì)比結(jié)果如下:
? 一階微分算子Sobel得到的邊緣較粗 ? 二階微分算子Laplace得到的邊緣則較細(xì),并且邊緣是雙邊緣 ? Lpalace算子對(duì)噪聲比較敏感,得到的邊緣圖像上噪聲較明顯
由于Laplace算子對(duì)噪聲敏感,會(huì)得到雙邊,并且并不能檢測(cè)邊緣的方向,其通常不用于直接的邊緣檢測(cè),只是起到輔助作用。檢測(cè)某像素實(shí)在邊緣的亮的一側(cè)還是暗的一側(cè),利用“零跨越”確定邊緣的位置。
總結(jié)
本文主要介紹了圖像空間域的銳化算子(也就是邊緣檢測(cè)算子),這些算子都是基于圖像的微分的:一階微分和二階微分(拉普拉斯算子)。
由于一階微分和二階微分有各自的特點(diǎn),其得到的圖像邊緣也不相同:一階微分得到的圖像邊緣較粗,二階微分得到的是較細(xì)的雙邊緣,所以在圖像的邊緣增強(qiáng)方面二階微分算子的效果較好。
-
濾波器
+關(guān)注
關(guān)注
161文章
7795瀏覽量
177996 -
圖像處理
+關(guān)注
關(guān)注
27文章
1289瀏覽量
56722 -
微分
+關(guān)注
關(guān)注
0文章
31瀏覽量
14098
原文標(biāo)題:圖像處理基礎(chǔ)——銳化空間濾波器
文章出處:【微信號(hào):Imgtec,微信公眾號(hào):Imagination Tech】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
拉普拉斯變換的基本性質(zhì).ppt
請(qǐng)問(wèn)用matlab對(duì)圖像進(jìn)行無(wú)方向性的二階微分如何調(diào)用函數(shù)
基于FPGA的圖像拉普拉斯銳化處理
基于FPGA的圖像拉普拉斯邊緣提取
玩轉(zhuǎn)Zynq連載43——[ex62] OV5640攝像頭的圖像拉普拉斯邊緣提取
玩轉(zhuǎn)Zynq連載45——[ex64] MT9V034攝像頭的圖像拉普拉斯銳化處理
玩轉(zhuǎn)Zynq連載46——[ex65] MT9V034攝像頭的圖像拉普拉斯邊緣提取
計(jì)算機(jī)Fortran編程實(shí)現(xiàn)偏微分方程拉普拉斯變換
Labview圖像處理——邊緣檢測(cè)
常微分方程復(fù)習(xí),常微分方程pdf
基于拉普拉斯算法的圖像銳化算法實(shí)現(xiàn)

異性四階偏微分方程耦合二階偏微分方程的圖像放大算法
具P Laplace算子的分?jǐn)?shù)階微分方程邊值問(wèn)題解的存在性論文說(shuō)明






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論