") 一種非常簡單但功能強大的機械手,叫作SoftHand 2
一種非常簡單但功能強大的機械手,叫作SoftHand 2
機器人圈子里有個段子,一旦發(fā)生了機器人動亂,你只要在家關好門就能自保,因為現(xiàn)在的機器人還不會開門。盡管目前的機器人在精度、速度、一致性要求很高的任務上表現(xiàn)優(yōu)異,但它們仍不能很好地完成操縱門把手這樣日常生活中的基本任務。這是由于人類根據(jù)自己的身體特點創(chuàng)造了人造環(huán)境的大部分設計,而機器人要能在其中實現(xiàn)自主導航、操作,就必須擁有和人類一樣的感知能力和一雙靈巧的手, 而這也恰是自然界中最精密復雜的機械結構。
目前對于機械手的研究和應用十分火熱,而抓取一直是其中最為重要的研究熱點。最近,比薩大學和意大利理工學院的研究人員開發(fā)出了一種非常簡單但功能強大的機械手,叫作SoftHand 2,只需兩臺電機即可運行。而著名的靈巧機械手Shadow Dexterous則需要20個馬達,和昂貴的價格。
像其他機械手一樣,SoftHand2也是通過“肌腱”的原理,也就是利用線纜來拉動手指,但線纜以一種更新穎的方式排列。它不使用一串電纜連接到單個手指,而只使用一條驅動纜繩通過滑輪組迂回連接每個手指。這看起來雖然沒那么靈活,但是能夠極大地減少成本和功耗。
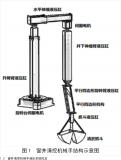
機械手SoftHand2的結構,驅動方式和纜繩纏繞方式
在最初設計這一機械手時,研究人員只用了一個電機構建一個更簡單的版本,SoftHand。負責系統(tǒng)開發(fā)的機器人專家Cosimo Della Santina表示“只用一個電機實現(xiàn)控制的基本思想在于當你轉動馬達時,肌腱的長度會縮小,這樣就會迫使手掌合攏”。
由于關節(jié)的彈性,會讓肌腱和手指再次舒展成平坦的手掌。如果你想用它來抓球,效果會很好。但因為手指們需要或多或少的一致移動,但這樣的構造不足以進行精細的操作任務。
SoftHand2的各種手勢
通過增加一個電機,SoftHand 2能夠顯著地提高靈活性。讓我們來看看上面的圖片,每個肌腱的末端都會連接到手腕上兩個馬達中的一個。如果以相同的方向運行電機,肌腱的長度會縮短,那么就能得到圖中a、b、c、d的手勢,這與單電機版本的SoftHand原理相同。反之,如果在相反的方向上運行電機,那么就會出現(xiàn)e、f、g、h的手勢,一個電機會釋放肌腱,而另一個電機則將它卷入。
兩個電機不同的驅動狀態(tài)和對應的手勢,以及一些應用
Della Santina 說,“如果一個肌腱穿過了很多的滑輪,那么肌腱的張力就會變得不恒定”。比如,如果一個電動機正在拉動,則肌腱末端的張力會提高。如果這時候另一個電機正在放出肌腱,那么該方面的張力會降低。通過這種方式利用張力,SoftHand所需的控制電纜要比典型的機械手要少得多,同時仍然可以讓所有這些手指擺動。
你看看上面的GIF動畫,就可以看到明顯感受到添加一個額外電機產(chǎn)生的差異。左邊只有一個電機,右邊用了兩個電機。單電機版本簡單粗暴的抓取方式需要讓所有的手指包裹住球。然而,兩個電機版本可以讓肌腱的張力不同,從而可以更靈巧的只用兩個手指捏住球。 手指捏的紙幣效果也一樣,如下。
盡管SoftHand只使用了兩個電機,但它仍可以完成一系列令人印象深刻的操作。
它還可以和各種機械臂組合實現(xiàn)更復雜的功能。
它可以伸出食指來拉開工具箱,或將一張紙從桌面上拖下來,甚至還可以擰開罐子。
工作累了來杯茶
哪一天,說不定還能給你打電話呢~
卡內基梅隆大學的機器人專家Lerrel Pinto說,“要讓機器人能夠學習并執(zhí)行炫酷的任務往往要求系統(tǒng)十分可靠且相對復雜,但這通常也就意味著高昂的價格。SoftHand機械手能夠做到價廉物美實屬不易,相對而言,它是經(jīng)濟實惠的,因為越多的電機意味著成本越高。但它能夠用于自主學習嗎?它足夠可靠和魯棒嗎?能夠勝任成千上萬次的抓取嗎?這些實際應用中的問題都有待更深入的研究。”
SoftHand2對于實現(xiàn)一些需要靈巧操作的場合十分有用,雖然不能像更復雜的機械手一般靈活,但它通過簡單的方式提供了更靈巧的抓取功能。相信隨著研究的深入,它會給我們更驚艷的表現(xiàn)。
如果你也想做一只這樣靈活的額機械手,那么看看下面的圖紙和論文,操練起來吧~~
-
機器人
+關注
關注
211文章
28466瀏覽量
207305 -
電動機
+關注
關注
75文章
4111瀏覽量
96448 -
機械手
+關注
關注
7文章
335瀏覽量
29662
原文標題:誰說簡單的機械手不可以靈巧啦?意大利研究人員開發(fā)出一款簡易但功能強大的機械手SoftHand 2
文章出處:【微信號:thejiangmen,微信公眾號:將門創(chuàng)投】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
機械手 OEM 的應用
機械手驅動系統(tǒng)設計要點
【GoKit申請】六軸智能機械手
PLC控制機械手設計
一種工業(yè)機械手的PLC控制
PLC在機械手步進控制中的應用

基于PLC的機械手混合驅動控制

雄克小型機械手MPG-plus,它是憑借什么征服了Denk公司?
一種極其簡單、但功能驚人的機器人手名為SoftHand 2
怎么去設計一種基于AMESim的窨井清挖機械手液壓系統(tǒng)呢?
PE保護膜是一種非常實用和功能強大的材料
坐標機械手配件有哪些?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論