") 詳細(xì)介紹S7-200 SMART運(yùn)動向?qū)У慕M態(tài)
詳細(xì)介紹S7-200 SMART運(yùn)動向?qū)У慕M態(tài)
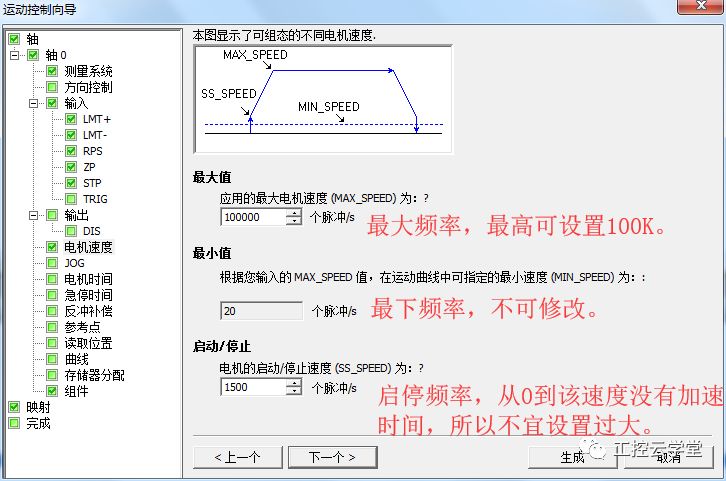
S7-200 SMART作為S7-200的升級款,在很多方面都進(jìn)行了優(yōu)化,使用更加的方便。其中運(yùn)動控制的優(yōu)化最為突出,S7-200運(yùn)動控制頻率低,編程比較麻煩,優(yōu)化后提供了很完善的向?qū)ЫM態(tài),只需要按照步驟將向?qū)ЫM態(tài)好,系統(tǒng)會自動生成各個(gè)功能的子程序,然后根據(jù)工藝要求調(diào)用相應(yīng)的子程序編程,使程序的編寫大為的簡化,本文就詳細(xì)的介紹運(yùn)動向?qū)У慕M態(tài)。
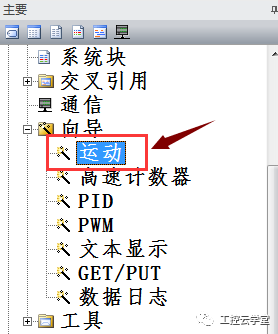
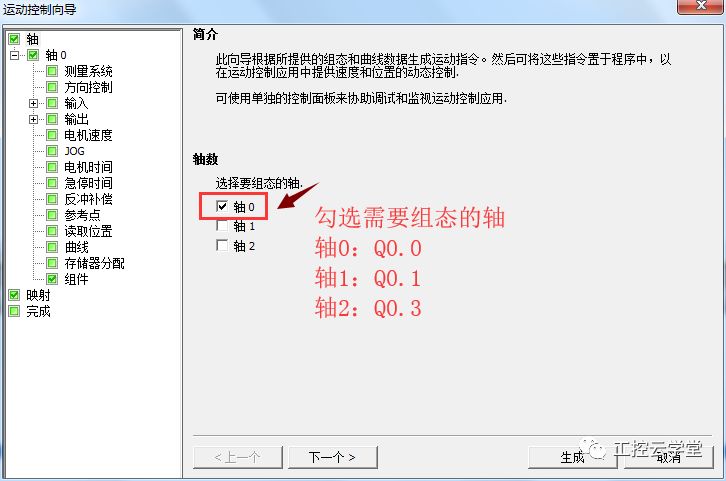
在項(xiàng)目樹中找到向?qū)?運(yùn)動,向?qū)ЫM態(tài)步驟如下圖所示:
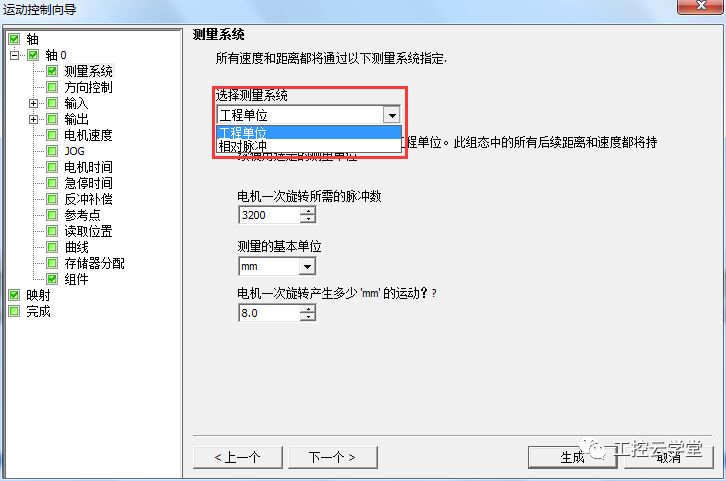
選擇工程單位則需要設(shè)置正確的運(yùn)動參數(shù),系統(tǒng)會根據(jù)設(shè)定的參數(shù)自動將距離和速度換算成脈沖數(shù)和脈沖頻率,所以設(shè)定的距離和速度都是浮點(diǎn)數(shù)。這種模式編程簡單,但是余數(shù)處理不夠靈活。
選擇相對脈沖則系統(tǒng)只能按照設(shè)定的脈沖數(shù)和脈沖頻率進(jìn)行發(fā)脈沖,設(shè)定值為雙整數(shù)。需要自己編寫程序?qū)⒃O(shè)定距離和速度換算成脈沖和脈沖頻率,編程較為麻煩,但余數(shù)處理比較靈活。本文以相對脈沖模式為例。
至此向?qū)ЫM態(tài)完成,點(diǎn)擊生成即可自動生成所需的運(yùn)動子程序,后續(xù)只要調(diào)用相應(yīng)的子程序編程即可。
注:上圖中未說明的步驟為使用較少的功能,可直接跳過。
生成后打開項(xiàng)目樹>指令>調(diào)用子程序,如下圖:
AXIS0_CTRL:運(yùn)動軸初始化。
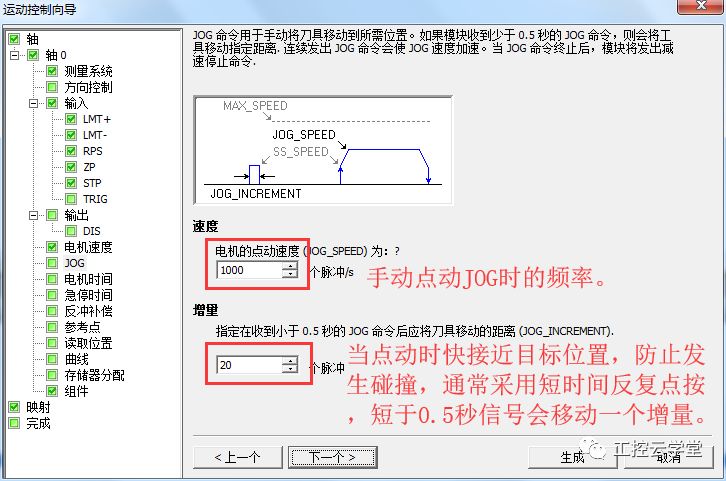
AXIS0_MAN:手動子例程。
AXIS0_GOTO:單段定量子例程。(可設(shè)置為相對或絕對)
AXIS0_RUN:多段定量曲線子例程。調(diào)用向?qū)е薪M態(tài)的曲線運(yùn)動。
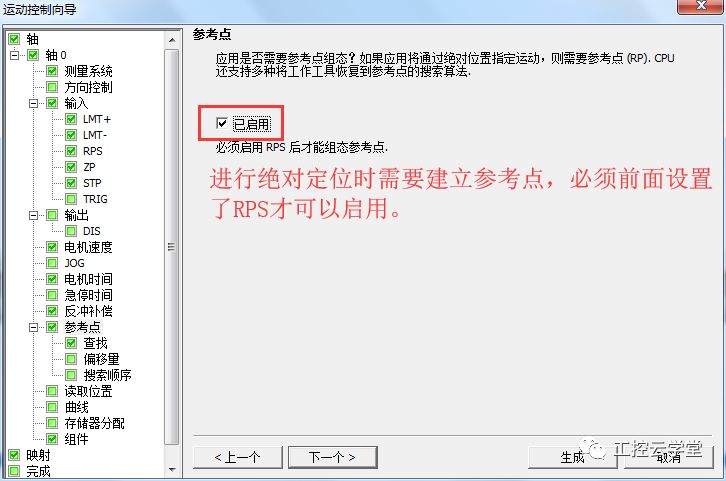
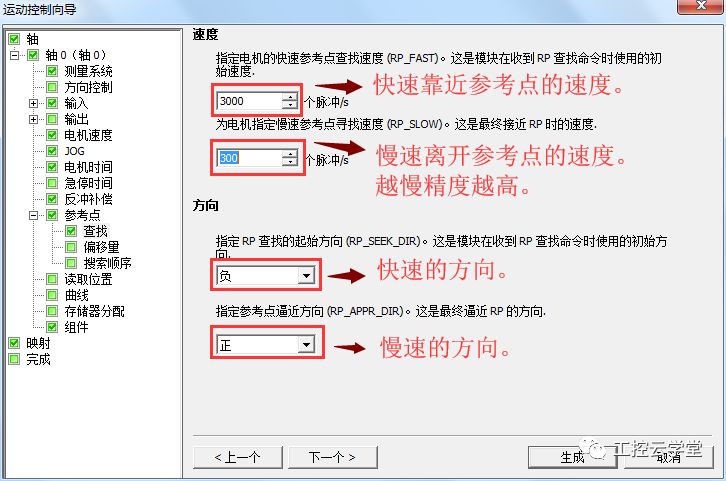
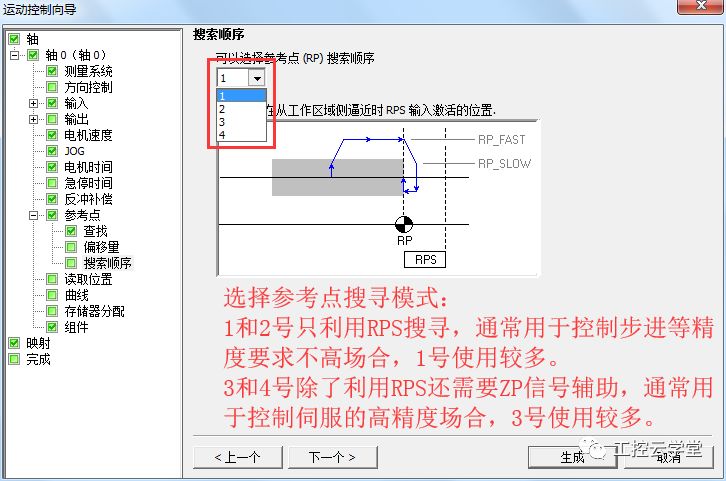
AXIS0_RSEEK:搜尋參考點(diǎn)子例程。按照向?qū)е薪M態(tài)的搜尋速度和搜尋模式搜尋RPS建立參考點(diǎn)。
AXIS0_LDPOS:修改當(dāng)前位置子例程,可以為運(yùn)動建立一個(gè)虛擬的參考點(diǎn)。
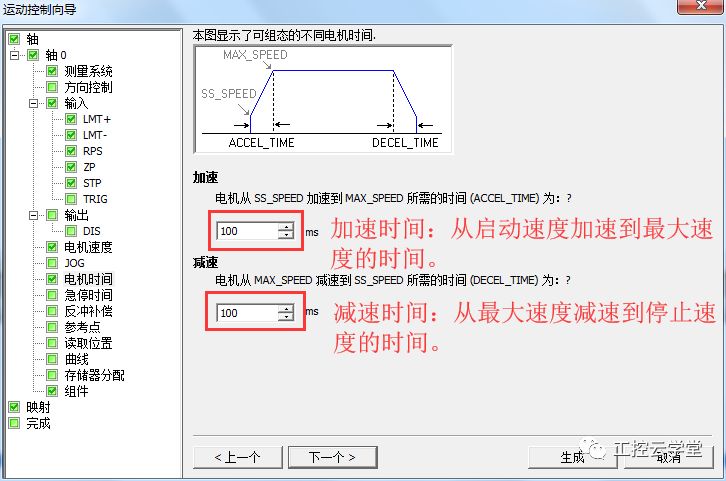
AXIS0_SRATE:修改加減速及急停時(shí)間子例程。
AXIS0_CFG:重新加載組態(tài)子例程。修改向?qū)?shù)據(jù)塊中數(shù)值后都要用CFG進(jìn)行刷新才生效。
其它子例程應(yīng)用較少,此處就不作介紹。
可以點(diǎn)擊關(guān)注本公眾號,后續(xù)會持續(xù)更新關(guān)于200smart的實(shí)例應(yīng)用。
-
SMART
+關(guān)注
關(guān)注
3文章
224瀏覽量
44681 -
S7-200
+關(guān)注
關(guān)注
13文章
408瀏覽量
50382
原文標(biāo)題:S7-200 SMART運(yùn)動向?qū)ЫM態(tài)詳解
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
S7-200 SMART 通信端口以及連接方式
052跟我學(xué):S7-200 SMART 運(yùn)動控制之使用向?qū)?/b>組態(tài)運(yùn)動軸#硬聲創(chuàng)作季
051跟我學(xué):S7-200 SMART 運(yùn)動控制概述#硬聲創(chuàng)作季
S7-200 SMART運(yùn)動向?qū)?/b>組態(tài)詳解
S7-200 SMART與調(diào)試助手之間TCP通信
S7-200 SMART CPU固件更新V2.7
S7-200 SMART使用運(yùn)動控制面板進(jìn)行調(diào)試
S7-200 SMART如何下載程序?
組態(tài)王軟件與S7-200SMART無線MODBUS通信

S7-200 SMART PLC的應(yīng)用案例

S7-1500與S7-200 SMART的PROFINET IO通信配置

SIMATIC S7-200 SMART系統(tǒng)手冊
S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論