") 通過(guò)在單片機(jī)AT90C8535上實(shí)現(xiàn)直接PWM軟件計(jì)算的方法
通過(guò)在單片機(jī)AT90C8535上實(shí)現(xiàn)直接PWM軟件計(jì)算的方法
1 、引言
隨著家用電器產(chǎn)品變頻技術(shù)的發(fā)展,單相電機(jī)的變頻調(diào)速已成為一種可行的方法,在這種調(diào) 速系統(tǒng)中,脈寬調(diào)制(PWM)技術(shù)仍然是提高調(diào)速性能的主要手段。雖然PWM技術(shù)的實(shí)現(xiàn)方法很多,然而,為了降低產(chǎn)品的制造成本,采用微機(jī)控制軟件實(shí) 現(xiàn)PWM控制具有成本低、調(diào)制方式靈活等特點(diǎn),比較適合于家用電器產(chǎn)品的要求。本文針對(duì) 洗衣機(jī)電機(jī)的調(diào)速要求,提出了采用直接PWM(DPWM)軟件計(jì)算的方法,并在AVR系列單片機(jī)AT90C8535上實(shí)現(xiàn),該方法可以很容易地實(shí)現(xiàn)電機(jī)的恒V/f比調(diào)速,其PWM算法簡(jiǎn)單,易于實(shí)現(xiàn),是一種較為實(shí)用的方法。
2、 直接PWM技術(shù)的算法
常用PWM技術(shù)的基本原理是利用高頻載波與控制波進(jìn)行比較,從而產(chǎn)生經(jīng)過(guò)調(diào)制的PWM波。為 滿足逆變電源的需要,減小輸出電壓的諧波含量,載波信號(hào)采用對(duì)稱的三角波實(shí)現(xiàn)PWM 輸出波形的對(duì)稱雙邊調(diào)制,使輸出電壓不含偶次諧波。
用軟件產(chǎn)生PWM波形的算法有很多方法,如:采樣SPWM法、均值PWM法、直接PWM法等,其中SPWM法有三種不同形式:對(duì)稱規(guī)則采樣SPWM、非對(duì)稱規(guī)則采樣SPWM、平均對(duì)稱規(guī)則采樣SPWM,以平均對(duì)稱規(guī)則采樣SPWM的算法簡(jiǎn)單,應(yīng)用較為廣泛。SPWM的主要缺點(diǎn)就是電源電壓利 用率不夠高,即輸出電壓不高。均值PWM法的基本思想是根據(jù)等面積PWM控制方式的原理,選 擇最佳脈沖中心線位置,使得其PWM波形的諧波成分量小,均值PWM法具有微機(jī)實(shí)現(xiàn)簡(jiǎn)單方便 的優(yōu)點(diǎn),且對(duì)各次諧波的抑制均有很好的效果。直接PWM法與均值PWM法類似,也是使相同時(shí) 間間隔內(nèi)的PWM波 的面積與調(diào)制波的面積相等,其主要的優(yōu)點(diǎn)是,在調(diào)制比固定時(shí),控制規(guī) 律正比于調(diào)制深度而反比于輸出頻率,特別使用于電機(jī)的控制,因此本文選擇直接PWM法。
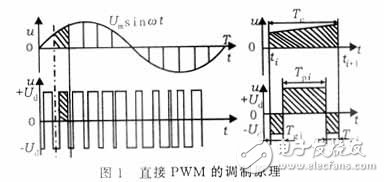
直接PWM法的調(diào)制原理如圖1所示,假定一個(gè)周期內(nèi)PWM波的脈沖數(shù)(即載波比)為2N,將參考 正弦波Umsin ωt的整個(gè)周期T分為2N等份,則每個(gè)區(qū)間的長(zhǎng)度(即載波周期)為T(mén)s=T/2N,在第i個(gè)區(qū)間正弦波的面積為:

設(shè)輸出PWM波的幅值為E,若采用單極性調(diào)制,則第i個(gè)區(qū)間內(nèi)的PWM波形所圍面積為:

若采用雙極性調(diào)制,則第i個(gè)區(qū)間內(nèi)的PWM波形所圍面積為:

式中,Tpi為脈沖的寬度,考慮到有Ts=Tpi+2Tgi,令Sri=Spi,由式(1)和式(2)整理可得:
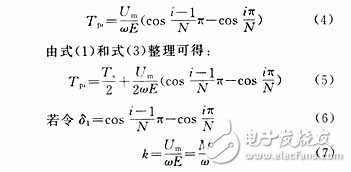
式中M=Um/E為調(diào)制深度,由式(4)或式(5)可分別計(jì)算出PWM的脈沖換相點(diǎn)公式為 :
由圖1可知,等面積PWM法生成的PWM波形在T/2處是點(diǎn)對(duì)稱的,因而可推導(dǎo)出:

在上述計(jì)算公式中,式(8)為單極性PWM調(diào)制,式(9)為雙極性調(diào)制。在計(jì)算過(guò)程中,雖然δi的表達(dá)式包含有三角函數(shù)的計(jì)算,但它僅與N有關(guān),一旦N確定后,可事先將計(jì)算好的δi存入內(nèi)存中,需要時(shí)通過(guò)查表方式獲取即可。從k的表達(dá)式可以看出,k正比于調(diào)制深度而反比于基波頻率ω。這對(duì)于電機(jī)的變頻調(diào)速系統(tǒng),通常使U/f比為常數(shù)來(lái)達(dá)到恒轉(zhuǎn)矩 控制,即只需使k值為一個(gè)常數(shù)即可。
3 、單片機(jī)實(shí)現(xiàn)PWM技術(shù)的設(shè)計(jì)
采用單片機(jī)實(shí)現(xiàn)PWM,為了保證能夠滿足變流電路的控制性能要求,設(shè)計(jì)時(shí)必須處理好以下 幾個(gè)技術(shù)問(wèn)題。
3.1 載波比
采用微機(jī)生成PWM波時(shí),必須事先確定好載波比N(或2N)。如果輸出頻率的變化范圍較大,那 么在整個(gè)頻率范圍內(nèi)采用同一個(gè)載波比的同步調(diào)制方案,難以兼顧高頻和低頻輸出時(shí)的性能。較大的載波比往往會(huì)造成高頻時(shí)PWM開(kāi)關(guān)頻率過(guò)高,導(dǎo)致開(kāi)關(guān)器件的開(kāi)關(guān)損耗增加,而較小的載波比又會(huì)造成低頻時(shí)PWM波過(guò)于稀疏,使電流脈動(dòng)增大、諧波分量增加等缺點(diǎn)。因此 采用分段同步調(diào)制是較合理的方法,即在不同的頻率段選擇不同的載波比,使變頻器在整個(gè)頻率變化范圍內(nèi),都有一個(gè)較為合理的PWM開(kāi)關(guān)頻率,以獲得較好的控制性能。然而載波比的選擇和切換時(shí)必須注意兩點(diǎn):
(1)切換時(shí)不出現(xiàn)電壓的突變。
(2)在各切換臨界點(diǎn)處需設(shè)置一個(gè)滯環(huán)區(qū),以避免輸出頻率落在臨界切換點(diǎn)附近時(shí)造成載波 頻率反復(fù)變化而引起的振蕩現(xiàn)象。
3.2 PWM波的開(kāi)關(guān)頻率極限
由于PWM波是通過(guò)單片機(jī)CPU實(shí)時(shí)計(jì)算的,因此所選擇PWM算法的數(shù)據(jù)處理量大小以及CPU的處 理速度是影響輸出PWM波開(kāi)關(guān)頻率極限的主要因素。設(shè)計(jì)時(shí)必須保證單片機(jī)能輸出的PWM波的最高開(kāi)關(guān)頻率滿足逆變器要求,當(dāng)然對(duì)逆變器的最低工作頻率要求是很容易滿足的。
3.3 PWM波的輸出頻率和調(diào)制深度指令
在變頻調(diào)速系統(tǒng)中,由于逆變器的輸出頻率是可調(diào)的,因而要求PWM算法的輸出頻率和調(diào)制 深度都能根據(jù)實(shí)際需要變化以適應(yīng)電機(jī)恒V/f比或恒功率控制的要求。一般,逆變器的輸出頻率指令可通過(guò)A/D轉(zhuǎn)換輸入到單片機(jī)中,調(diào)制深度M可以用軟件計(jì)算完成,也可采取類似的方法讀入CPU。
3.4 橋臂互鎖及死區(qū)時(shí)間
為了保證逆變器同一橋臂上下兩管同時(shí)導(dǎo)通而引起的短路,兩驅(qū)動(dòng)信號(hào)間必須留有一定的死 區(qū)時(shí)間,以防止一管還未完全關(guān)斷時(shí)另一管便開(kāi)始導(dǎo)通的短路故障。此要求可以在單片機(jī)PWM波的計(jì)算程序中加以考慮。然而這樣做往往會(huì)增加單片機(jī)的數(shù)據(jù)處理工作量,而且僅靠軟件實(shí)現(xiàn)上下橋臂開(kāi)關(guān)管的互鎖和死區(qū)延遲也不可靠,因此,為保證電路的安全性,建議最好在硬件電路設(shè)計(jì)上充分考慮并實(shí)現(xiàn)此項(xiàng)要求。
3.5 初始狀態(tài)及故障封鎖
任何一款型號(hào)的CPU,工作前總存在復(fù)位狀態(tài),此時(shí)CPU各I/O輸出口全“1”或全“0”,設(shè) 計(jì)時(shí)應(yīng)避免在此復(fù)位狀態(tài)時(shí)造成所有開(kāi)關(guān)管都被驅(qū)動(dòng)導(dǎo)通的危險(xiǎn),因此應(yīng)將CPU復(fù)位時(shí)的初 始電平值設(shè)置成開(kāi)關(guān)管驅(qū)動(dòng)信號(hào)無(wú)效狀態(tài)。此外,當(dāng)發(fā)生故障時(shí),也可以通過(guò)輸出故障封鎖信號(hào)來(lái)關(guān)閉驅(qū)動(dòng)信號(hào)。
4、PWM波的單片機(jī)控制
在本文分析的洗衣機(jī)電機(jī)控制中,逆變器的輸出頻率由給定電位器調(diào)節(jié),經(jīng)A/D轉(zhuǎn)換輸入至 單片機(jī),由單片機(jī)根據(jù)給定輸出頻率的大小計(jì)算逆變器電壓,以適應(yīng)變頻調(diào)速的恒V/f 比控制要求。控制芯片采用AT90S8535單片機(jī)。
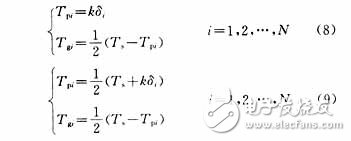
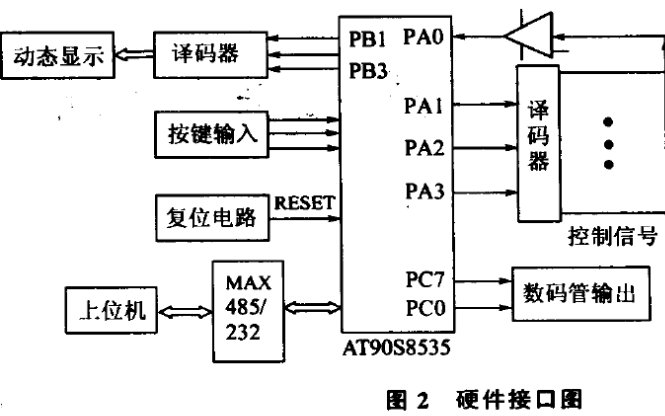
AT90S8535是40腳封裝的RISC結(jié)構(gòu)低功耗CMOS 8位單片機(jī),具有8K字節(jié)的Flash,512字節(jié)的EE PROM,512字節(jié)RAM,32個(gè)多功能的I/O口,3個(gè)內(nèi)部定時(shí)/計(jì)數(shù)器,8通道10位A/D轉(zhuǎn)換器,2個(gè)外部中斷源,可編程的串行通訊,可編程的看門(mén)狗定時(shí)器等資源,適合于許多要求集成度高、成本低的應(yīng)用場(chǎng)合,其引腳配置如圖2所示。
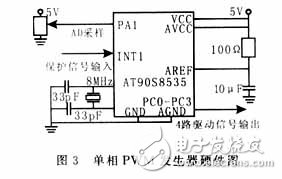
設(shè)逆變器輸出壓頻變化關(guān)系曲線是已知的,當(dāng)逆變器的輸出頻率確定后,PWM控制的載波比 和調(diào)制深度指令也隨之確定。單片機(jī)的資源分配為:39腳的PA1作為A/D采樣輸入口,采樣輸出頻率;PC0~PC3作為PWM輸出的驅(qū)動(dòng)信號(hào),設(shè)置為輸出口;17腳的INT1外部中斷作為電路 故障信號(hào)(如過(guò)流、過(guò)壓、短路等)的輸入腳,同時(shí)該腳也作為“解除閉鎖”控制位的輸入腳,其作用在于:當(dāng)故障發(fā)生時(shí),由外部中斷輸入引腳的信號(hào)變化向CPU提出中斷請(qǐng)求,CPU響應(yīng)中斷,在執(zhí)行中斷服務(wù)程序中輸出PWM封鎖信號(hào)并實(shí)現(xiàn)閉鎖,直到解除閉鎖控制位有效時(shí),才撤銷(xiāo)PWM封鎖信號(hào),使PWM波能夠正常輸出。由于AT90S8535芯片的復(fù)位時(shí)端口的初始狀態(tài)是“高”,因此封鎖信號(hào)和驅(qū)動(dòng)信號(hào)均設(shè)置成“低”電平為無(wú)效狀態(tài),此時(shí)端口輸出信號(hào)使所有功率開(kāi)關(guān)管處于關(guān)斷狀態(tài)。PWM波的載波周期由片內(nèi)T0定時(shí)器來(lái)完成,PWM波換相所需的時(shí)間由片內(nèi)T1定時(shí)器來(lái)實(shí)現(xiàn)。采用AT90S8535單片機(jī)實(shí)現(xiàn)的單相PWM波形發(fā)生器的硬件連接關(guān)系如圖3所示。
5 、單片機(jī)控制軟件設(shè)計(jì)
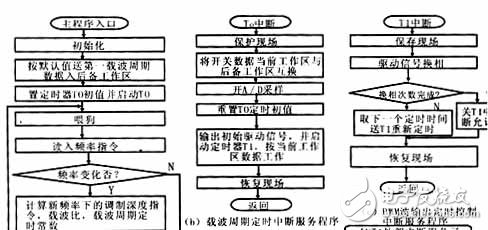
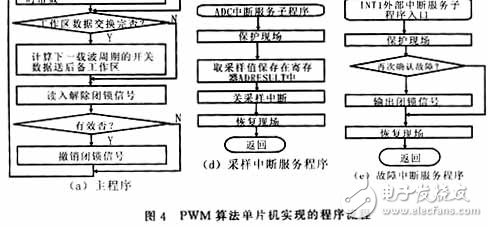
按上述算法分析,軟件只計(jì)算PWM波的切換時(shí)間,在CPU中由定時(shí)中斷服務(wù)程序完成PWM脈沖 波的換相。其具體過(guò)程:PWM的載波周期Ts由載波周期定時(shí)器定時(shí),當(dāng)定時(shí)到時(shí),向C PU發(fā)出中斷申請(qǐng),CPU響應(yīng)中斷并執(zhí)行中斷服務(wù)程序,此中斷服務(wù)程序的主要任務(wù)是將保存 在內(nèi)存中的PWM開(kāi)關(guān)定時(shí)數(shù)據(jù)(在上一個(gè)載波周期計(jì)算出來(lái)的PWM換相定時(shí)時(shí)間)送PWM波定時(shí)器,并啟動(dòng)此定時(shí)器工作,然后再計(jì)算下一個(gè)載波周期的PWM數(shù)據(jù)并保存。
PWM波定時(shí)器根據(jù)載波周期定時(shí)中斷服務(wù)程序送來(lái)的開(kāi)關(guān)數(shù)據(jù)進(jìn)行定時(shí)控制,在中斷服務(wù)程 序中完成對(duì)PWM的換相并輸出至端口。
主程序的主要任務(wù)是,對(duì)逆變器輸出頻率指令f的采樣或計(jì)算,并計(jì)算與頻率指令對(duì)應(yīng)的調(diào) 制深度指令、載波比、載波周期定時(shí)常數(shù)等,為載波周期定時(shí)中斷服務(wù)程序的計(jì)算提供實(shí)時(shí)指令。然而在變頻切換時(shí),由于電壓跟隨頻率的變化而改變,變頻瞬間容易產(chǎn)生電流沖擊。通常解決辦法是在基波電壓過(guò)零時(shí)(即0°、180°),變頻瞬間無(wú)電流沖擊,但該方法會(huì)造成頻 率變化響應(yīng)過(guò)程較慢,特別是低頻時(shí)響應(yīng)時(shí)間過(guò)長(zhǎng)。因此最好能設(shè)計(jì)成在任何一個(gè)載波周期結(jié)束時(shí)刻都可以進(jìn)行頻率切換,為防止電流沖擊的產(chǎn)生,此時(shí)應(yīng)使頻率切換前后的基波電壓不僅與頻率和相位有關(guān),還和調(diào)制比有關(guān),使得計(jì)算頻率變化前后基波電壓相等的條件相當(dāng)費(fèi)時(shí),因此在實(shí)現(xiàn)過(guò)程中,一般按相位相等的原則進(jìn)行頻率切換。即在新舊頻率切換時(shí),根據(jù)脈沖計(jì)數(shù)器所表示的相位關(guān)系進(jìn)行等相位切換。假定舊頻率時(shí)的載波比為N1,頻率變化的切換時(shí)刻計(jì)數(shù)器值為P1,新頻率時(shí)載波比為N2,切換時(shí)新頻率計(jì)數(shù)器的值P2應(yīng)為:

求出P2后再進(jìn)行切換。
實(shí)現(xiàn)PWM算法的整個(gè)控制程序流程如圖4所示。
6 、實(shí)驗(yàn)與結(jié)論
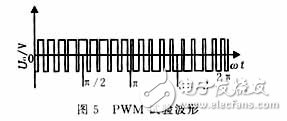
按照上述設(shè)計(jì)方法,研制了單片機(jī)控制系統(tǒng)的軟硬件,并進(jìn)行了實(shí)驗(yàn),其輸出波形如圖5所 示。實(shí)驗(yàn)證明,該方法簡(jiǎn)單可行,控制性能良好,具有一定的實(shí)用價(jià)值。
此外,三相PWM發(fā)生器的實(shí)現(xiàn)方法與單相也是相似的,不同之處在于三相PWM發(fā)生器需要3個(gè) PWM波換相定時(shí)器,再加上載波周期定時(shí)器,共需4個(gè)定時(shí)器。至于三相PWM發(fā)生器的軟件設(shè)計(jì),其基本的設(shè)計(jì)方法與單相的是相同的,這里不再討論。
責(zé)任編輯:gt
-
單片機(jī)
+關(guān)注
關(guān)注
6039文章
44579瀏覽量
636448 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6635瀏覽量
110685 -
PWM
+關(guān)注
關(guān)注
114文章
5193瀏覽量
214222
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AVR系列單片機(jī)C語(yǔ)言編程及應(yīng)用實(shí)例
AVR單片機(jī)應(yīng)用設(shè)計(jì),pdf版下載
AVR單片機(jī)C語(yǔ)言編程及應(yīng)用實(shí)例
AT90S4434_8535中文資料.pdf
avr單片機(jī)c語(yǔ)言
AVR系統(tǒng)單片機(jī)C語(yǔ)言編程與應(yīng)用實(shí)例
AVR單片機(jī)C語(yǔ)言編程及應(yīng)用實(shí)例
AT90S4434/8535,中文資料,pdf datash
AVR單片機(jī)AT90系列介紹
8051單片機(jī)C語(yǔ)言軟件設(shè)計(jì)8051單片機(jī)C語(yǔ)言軟件設(shè)計(jì)

如何使用AT90S8535單片機(jī)實(shí)現(xiàn)數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
單片機(jī)軟件模擬PWM調(diào)光程序下載
基于51單片機(jī)雙極型PWM的軟件實(shí)現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論