 多傳感器信息融合技術的應用研究與存在的問題分析
多傳感器信息融合技術的應用研究與存在的問題分析
一、引言
傳統的信號采集往往由單一的傳感器來完成,即使采用多個(種)傳感器也僅是從多個側面孤立地反映目標信息。實際上,在大多數情況下,必須同時處理多個信號,而這些信號一般又來自多個信號源,即多傳感器。但是多傳感器也帶來了信息冗余甚至矛盾。所以必須通過對各種傳感器及其觀測信息的合理支配與使用,將其采集的信息依據某種優化準則組合,產生對觀測環境一致性的解釋和描述,因此迫切要求對信息進一步處理。“信息融合”就是對多傳感器的數據進行多級別、多方面、多層次的處理,即組合或融合來自多個傳感器或其他信息源的數據,以獲得綜合的、更好的估計。
目前國內在多傳感器融合方面的研究尚處于初始階段,對這方面系統介紹的文獻也相對較少,多傳感器融合是一個復雜的信息處理過程,所要研究的問題多,而且解決問題的方法也很多,因此有必要對目前的研究情況進行系統的介紹。
二、信息融合基本概念及優越性
由于信息融合的定義都是功能性的描述,美國國防部JDL從軍事應用的角度將數據融合進行定義,Waltz和Llinas對其進行了補充和修改,給出了較完整的定義:一種多層次的、多方面的處理過程,這個過程是對多源數據進行檢測、結合、相關、估計和組合以達到精確的狀態估計和身份估計,以及完整及時的態勢評估和威脅估計。
近年來信息融合技術在基本理論和實現方法上得到極大的完善,顯示出自身極大的優越性,主要表現在:容錯性好;系統精度高;信息處理速度塊;互補性強;信息獲取成本低等方面。
三、數據融合技術的理論方法
數據融合的關鍵問題是模型設計和融合算法,數據融合模型主要包括功能模型、結構模型和數學模型。功能模型從融合過程出發,描述數據融合包括哪些主要功能和數據庫,以及進行數據融合時系統各組成部分之間的相互作用過程;結構模型從數據融合的組成出發,說明數據融合系統的軟、硬件組成,相關數據流、系統與外部環境的人機界面;數學模型是數據融合的算法和綜合邏輯,算法主要包括分布檢測、空間融合、屬性融合、態勢評估和威脅估計算法等,下面從3個方面分別進行介紹。
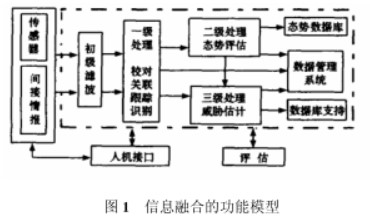
1)信息融合的功能模型目前已有很多學者從不同角度提出了信息融合系統的一般功能模型,最有權威性的是DFS(美國三軍政府組織-實驗室理事聯席會(JDL)下面的C3I技術委員會(TPC3)數據融合專家組)提出的功能模型。
該模型把數據融合分為3級。第1級是單源或多源處理,主要是數字處理、跟蹤相關和關聯;第2級是評估目標估計的集合,及它們彼此和背景的關系來評估整個情況;第3級用一個系統的先驗目標集合來檢驗評估的情況。
其簡化模型如圖1所示。
2)信息融合的結構模型數據融合的結構模有多種不同的分類方法,其中一種分類標準是根據傳感器數據在送人融合處理中心之前已經處理的程度來進行分類。在這種分類標準下,融合結構被分為傳感器級數據融合,中央級數據融合及混合式融合,還可以根據數據處理過程的分辨率來對融合結構進行分類。在這種情況下,融合結構為像素級、特征級和決策級融合。
3)多傳感器信息融合實現的數學模型信息融合的方法涉及到多方面的理論和技術,如信號處理、估計理論、不確定性理論、模式識別、最優化技術、模糊數學和神經網絡等這方面國外已經做了大量的研究。
目前,這些方法大致分為兩類:隨機類方法和人工智能方法。
①隨機類方法這類方法研究對象是隨機的,在多傳感器信息融合中常采用隨機類方法包括很多,這里只介紹前3種方法。
a.Bayes推理方法把每個傳感器看作是一個Bayes估計器,用于將每一個目標各自的關聯概率分布綜合成一個聯合后驗分布函數,然后隨觀測值的到來,不斷更新假設的該聯合分布似然函數,并通過該似然函數的極大或極小進行信息的最后融合。雖然Bayes推理法解決了傳統的推理方法的某些缺點,但是定義先驗似然函數比較困難,要求對立的假設彼此不相容,無法分配總的不確定性,因此,Bayes推理法具有很大的局限性。
b.Dempster-Shafer的證據理論是一種廣義的Bayes推理方法,它是通過集合表示命題,把對命題的不確定性描述轉化為對集合的不確定性描述,利用概率分配函數、信任函數、似然函數來描述客觀證據對命題的支持程度,用它們之間的推理與運算來進行目標識別。D-S證據理論可以不需要先驗概率和條件概率密度,并且能將“不知道”和“不確定”區分開來,但是它存在潛在的指數復雜度問題和要求證據是獨立的問題。
c.Kalman濾波融合算法它利用測量模型的統計特性,遞推確定在統計意義下最優的融合數據估計,適合于線性系統的目標跟蹤,并且一般適用于平穩的隨機過程,它要求系統具有線性的動力學模型,且系統噪聲和傳感器噪聲是高斯分布白噪聲模型,并且計算量大,對出錯數據非常敏感。
②人工智能方法近年來,用于多傳感器數據融合的計算智能方法有:小波分析理論、模糊集合理論、神經網絡、粗集理論和支持向量機等,限于篇幅只介紹小波變換和神經網絡方法。
a.小波變換是一種新的時頻分析方法,它在多信息融合中主要用于圖像融合,即是把多個不同模式的圖像傳感器得到的同一場景的多幅圖像,或同一傳感器在不同時刻得到的同一場景的多幅圖像,合成為一幅圖像的過程。經圖像融合技術得到的合成圖像可以更全面、精確地描述所研究的對象。基于小波變換的圖像融合算法為:首先用小波變換將各幅原圖像分解,然后基于一定的選擇規則,得到各幅圖像在各個頻率段的決策表,對決策表進行一致性驗證得到最終的決策表,在最終決策表的基礎上經過一定的融合過程,得到融合后的多分辨表達式,最后經過小波逆變換得到融合圖像。
b.神經網絡方法是在現代神經生物學和認知科學對人類信息處理研究成果的基礎上提出的,它有大規模并行處理、連續時間動力學和網絡全局作用等特點,將存儲體和操作合二為一。利用人工神經網絡的高速并行運算能力,可以避開信息融合中建模的過程,從而消除由于模型不符或參數選擇不當帶來的影響,并實現實時識別。由于神經網絡的種類繁多,學習算法多種多樣,新的結構和算法層出不窮,使得目前對神經網絡數據的研究非常廣泛。
四、信息融合技術的應用研究
最初信息融合技術是為了滿足戰爭的需求,目前軍事領域仍是信息融合的最大應用領域,發展也最快,主要應用在預警系統、武器系統的指揮和控制、情報保障系統、軍事力量的評估和指揮系統以及天地一體化信息融合系統。隨著各種傳感器技術和電子芯片的發展,信息融合技術在民用方面也得到了廣泛的發展,下面詳細介紹數據融合在智能機器人、故障診斷和圖像處理方面的應用。
①信息融合在機器人研究領域中的應用機器人技術是一門綜合技術,集光機電液信于一身,多感覺傳感器系統與機器人相結合,形成感覺機器人和智能機器人。機器人演奏、機器人足球比賽、機器人摔跤等需要高度信息融合技術,工業機器人則成為典型的多傳感器集成和融合系統,這里主要介紹信息融合技術在移動機器人和工業機器人方面的應用。
如何精確地獲得自身的位置并由此規劃運動路徑,是自主式移動機器人研究領域中一直得到關注的問題。輪式移動機器人由于輪子打滑及測量模型噪聲等原因,存在累計誤差問題。為了進一步提高移動機器人的定位精度,文獻采用擴展Kalman濾波對這兩種傳感器信息進行融合,即通過激光掃描器提供的信息不斷修正光電編碼器的定位信息,提高了定位精度。
工業機器人在工業系統中主要完成物料搬運、制造、裝配、檢測等,現已有一些較為成熟的應用例子,如Hitachi公司研制的應用于電子產品裝配線上的工業機器人將三維視覺傳感器和力傳感器測出的數據進行融合。Georgia理工學院研制的機器人融合視覺和觸覺傳感器的信息。還有Groen等人研制的用于機械產品裝配生產線上、Smith和Nitan等人研制的用于產品包裝、Kremers等人研制的適用于加工制造業的一些工業機器人。
2)信息融合技術在故障診斷領域中的應用基于信息融合的故障診斷方法,是通過多傳感器獲取設備狀態的特征信號,并進行多層關聯組合、數據選擇,從而獲得對診斷對象故障信息更可靠的認識和對潛在故障發展趨勢的態勢評估。
文獻針對某泵壓式供應系統液體火箭發動機的泄漏故障,利用系統故障癥狀的分散性,提出了一種基于模糊數據融合技術的系統故障診斷方法。文獻構造了神經網絡信息融合中心,對來自多傳感器的殘差信號進行了預處理和離散小波變換,使用改進BP算法對神經網絡分類器訓練以進行相應的故障模式識別。文獻利用不同采樣速率多傳感器觀測對象,充分考慮多尺度、多信息融合狀態估計精度和強跟蹤濾波器理論在處理非線性系統時變參數與狀態估計的能力,實現了變壓器故障的在線診斷。
3)信息融合技術在圖像處理方面的應用遙感圖像的信息融合能使各種空間、波譜和時間分辨率的圖像納入統一的時空內,融合構成一種新的圖像,增加信息量,實現多種信息的互補,改善了圖像的質量和有效性。文獻把同一目標的不同傳感器獲得的圖像數據利用小波包變換進行融合,得到目標較為清晰的融合圖像。文獻提出了一種針對SAR(合成孔徑雷達)圖像保留邊緣的融合方法,在計算量不顯著增加的前提下,提高了邊緣檢測的質量。
在醫學方面CT與NMR具有不同的成像機理,CT能夠清晰表達骨骼信息,而NMR能夠清晰表達軟組織信息,文獻提出了一種新的基于小波變換的系數取大融合算法,從而既可清晰地表現骨組織信息,又可清晰地表現軟組織信息,這對臨床醫學具有十分重要的意義。
五、數據融合研究中的存在問題
1)未形成基本理論框架和有效廣義模型及算法雖然數據融合的研究已經相當廣泛,但是自前對信息融合的研究都是根據問題的種類,各自建立融合準則,并在此基礎上形成所謂最佳融合方案,而且目前很多研究工作是基礎研究、仿真性工作。
2)關聯的二義性是數據融合中的主要障礙在進行融合處理前,必須對信息進行關聯,以保證所融合的信息是來自同一目標。所以,信息可融合性的判斷準則及如何進一步降低關聯的二義性已成為融合研究領域亟待解決的問題。
3)數據融合方法與融合系統實施問題數據融合系統的設計實施目前還存在許多實際的問題:傳感器動態測量誤差模型的建立、傳感器系統優化、復雜動態環境下系統實時性、大型知識庫的建立與管理、與其他領域的很多新技術的“嫁接與融合”,如人工智能技術、計算神經網絡計算、遺傳算法、進化計算、虛擬現實技術性等,這些尚無成熟理論。
4)融合系統的容錯性和穩健性沒有得到很好的解決沖突(矛盾)信息或傳感器故障所產生的錯誤信息等的有效處理,即系統的容錯性或穩健性也是信息融合理論研究中必須考慮的問題。
六、研究方向展望
盡管信息融合技術20多年來已有了很大的發展,但仍然還有很多領域有待于進一步的研究與探索,目前主要包括:
① 多傳感器分布檢測研究分布式檢測融合自提出至今已形成了比較完善的理論體系。目前對該領域的研究主要有:在各檢測器性能時變的條件下,如何自適應估計各檢測器性能并進行分布式檢測融合是目前的一個方向;在信號參數模糊下的分布式檢測融合問題:在信號參數隨機變化下的分布式檢測融合問題;微弱信號的檢測融合問題。
② 異類多傳感器信息融合技術研究異類多傳感器信息融合由于具有時間不同步,數據率不一致及測量維數不匹配等特點,幾因而具有很大的不確定性。在異類多傳感器信息融合中,如何利用各傳感器信息進行航跡起始,如何綜合利用位置、動態及特征和屬性參數改善目標跟蹤性,如何合理利用互補信息以改善對目標的識別及如何實現檢測跟蹤的聯合優化都是需要進一步研究和解決的問題。③傳感器資源分配與管理技術研究多個傳感器構成了多傳感器系統的互補體系,因此必須按照某些工作準則適當地管理這些傳感器,以便獲得最優的數據采集性能。傳感器管理的內容通常包括:空間管理、模式管理和時間管理。這一方面主要包括:傳感器性能預測,傳感器對目標的分配方法,傳感器空間和時間作用范圍控制準則,傳感器配置和控制策略,傳感器接口技術,傳感器對目標分配的優先級技術,以及傳感器指示和交接技術。
③ 研究數據融合用的數據庫和知識庫,高速并行檢索和推理機制利用大型空間數據庫中數據和知識進行推理是融合系統過程中的關鍵任務,因此深人研究和探討空間數據庫的知識庫,高速并行推理機制應成為未來的研究重點之一。
七、結語
綜上所述,多傳感器信息融合技術涉及到多學科、多領域,且具有多信息量、多層次、多手段等特點,并在機器人、故障診斷、圖像處理等民用領域中,充分發揮了強大的信息處理優勢,幾乎一切需要信息處理的系統都可以應用信息融合,利用信息融合技術可得到比單一信息源更精確更完全的判斷。隨著科學技術的發展,尤其是人工智能技術的進步,數據融合的基礎理論將更加完善,兼有穩健性和準確性的融合算法和模型將不斷推出,研究數據融合的數據庫和知識庫也會取得重大進展。在將來,多傳感器信息融合技術以軍事應用為核心,將不斷地向工業、農業等領域滲透,進而取得更為廣泛的應用。
責任編輯:gt
-
傳感器
+關注
關注
2550文章
51037瀏覽量
753085 -
神經網絡
+關注
關注
42文章
4771瀏覽量
100719 -
人工智能
+關注
關注
1791文章
47184瀏覽量
238266
發布評論請先 登錄
相關推薦
深度解析多傳感器信息融合技術
仿生四足機器人中多傳感器信息融合的應用有哪些
基于多傳感器與數據融合技術的研究


基于多傳感器信息融合技術的應用研究和設計開發





 工商網監
工商網監
評論