") 利用EDA軟件實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)的設(shè)計(jì)
利用EDA軟件實(shí)現(xiàn)步進(jìn)電動(dòng)機(jī)自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)的設(shè)計(jì)
自動(dòng)進(jìn)給控制系統(tǒng)是數(shù)控機(jī)床等現(xiàn)代加工設(shè)備的重要組成部分。要求以IC74191中規(guī)模數(shù)字集成計(jì)數(shù)器為核心,以步進(jìn)電動(dòng)機(jī)為執(zhí)行元件,設(shè)計(jì)一個(gè)數(shù)字化自動(dòng)進(jìn)給控制系統(tǒng)。用EDA軟件進(jìn)行自動(dòng)進(jìn)給控制系統(tǒng)的研究和設(shè)計(jì),創(chuàng)建系統(tǒng)的仿真電路,給出仿真實(shí)驗(yàn)結(jié)果。要求刀具進(jìn)給速度為2~5次/s;利用虛擬數(shù)字邏輯分析儀和示波器觀測(cè)各點(diǎn)的波形;進(jìn)給脈沖的個(gè)數(shù)可由LED七段譯碼顯示器顯示。
1 、系統(tǒng)結(jié)構(gòu)框圖
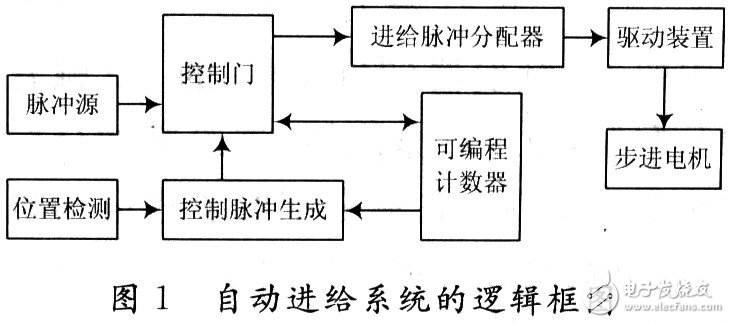
數(shù)控機(jī)床等現(xiàn)代加工設(shè)備是采用自動(dòng)控制、數(shù)字裝置或計(jì)算機(jī),全部或部分地取代一般通用機(jī)床加工零件時(shí)的人工控制。數(shù)控機(jī)床的各種控制功能,均是以數(shù)字和文字代碼方式為控制指令,并通過(guò)數(shù)字裝置的控制來(lái)實(shí)現(xiàn)的,自動(dòng)進(jìn)給數(shù)控系統(tǒng)是現(xiàn)代加工設(shè)備的核心部分,它由數(shù)字邏輯電路組合而成,廣泛應(yīng)用于數(shù)控設(shè)備的自動(dòng)進(jìn)給控制系統(tǒng)中。圖1是自動(dòng)進(jìn)給系統(tǒng)的邏輯框圖。它由位置檢測(cè)電路、控制脈沖生成電路、控制門(mén)、脈沖源、可編程計(jì)數(shù)器、進(jìn)給脈沖分配器、放大驅(qū)動(dòng)電路和步進(jìn)電動(dòng)機(jī)等組成。
2 、基于IC74191的自動(dòng)進(jìn)給控制系統(tǒng)的設(shè)計(jì)
圖2是基于IC74191的自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)的電路圖。集成計(jì)數(shù)器(74191)、4-16線譯碼器(74159)、16選1數(shù)據(jù)選擇器74150、編程開(kāi)關(guān)[D][C][B][A]、譯碼顯示器組成狀態(tài)譯碼置零可編程計(jì)數(shù)器。狀態(tài)譯碼置零可編程計(jì)數(shù)器要求7419l的預(yù)置數(shù)端D、C、B、A置零,即DCBA=0000。741191的輸出端QD,QC,QB,QA接74159的數(shù)碼輸入端,并在輸出端翻譯出相應(yīng)的16個(gè)狀態(tài)(數(shù)字),再由74150通過(guò)編程開(kāi)關(guān)[D][C][B][A]選中其中的一個(gè)數(shù)字,在74150的W端輸出,經(jīng)過(guò)一個(gè)非門(mén)電路送至74191的預(yù)置數(shù)控制端,即LOAD‘端,就可通過(guò)編程開(kāi)關(guān)[D][C][B][A]使74191成為可編程可變進(jìn)制計(jì)數(shù)器。表1是該計(jì)數(shù)器的編程狀態(tài)表。
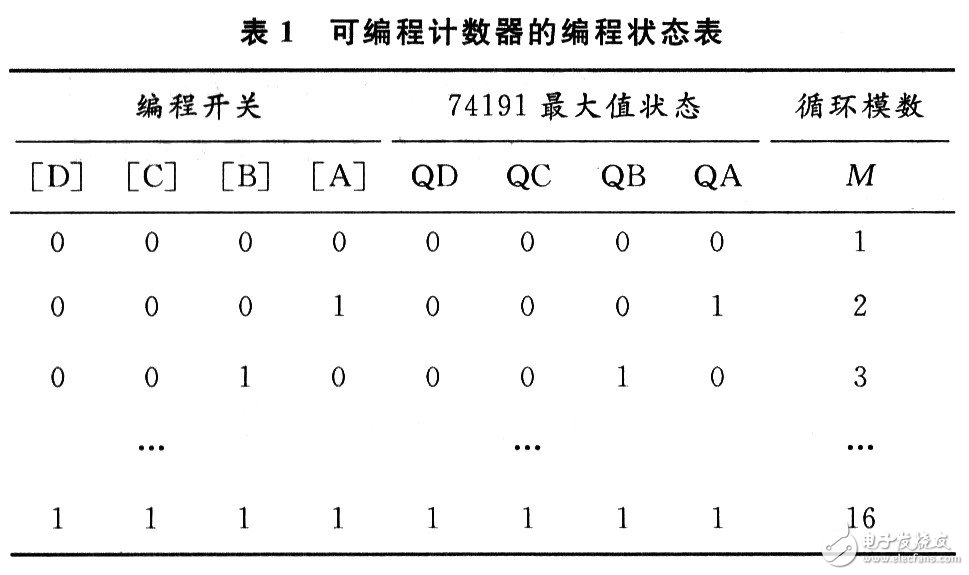
當(dāng)?shù)毒叩倪M(jìn)給當(dāng)量設(shè)計(jì)為6個(gè)CLK脈沖時(shí),如圖2所示,編程開(kāi)關(guān)取值[D][C][B][A]=0110,計(jì)數(shù)器的狀態(tài)依次為0000,0001,0010,0011,0100,0101,0110,譯碼顯示器顯示出相應(yīng)的十進(jìn)制數(shù)為0,1,2,3,4,5,6,然后停止工作,等待下次進(jìn)給啟動(dòng)信號(hào)的到來(lái)。自動(dòng)進(jìn)給控制電路由輸入端與非門(mén)(7410)(構(gòu)成RS觸發(fā)器)、與非門(mén)G(自動(dòng)進(jìn)給控制門(mén))、時(shí)鐘脈沖信號(hào)源Us等組成,Us是由555定時(shí)器構(gòu)成自激多諧振蕩器,振蕩頻率設(shè)計(jì)為2~5 Hz,適于刀具進(jìn)給速度為2~5次/s。S1,S2為常開(kāi)延時(shí)打開(kāi)定時(shí)開(kāi)關(guān),轉(zhuǎn)換開(kāi)關(guān)[X]代替位置檢測(cè)裝置,發(fā)出位置檢測(cè)負(fù)脈沖信號(hào)。可編程計(jì)數(shù)器的編程狀態(tài)表如表1所示。
圖2中的4D觸發(fā)器(74175)中的3D觸發(fā)器構(gòu)成進(jìn)給脈沖分配器,即環(huán)形分配器,進(jìn)給脈沖分配器是將進(jìn)給脈沖按照一定順序輪流分配給步進(jìn)電動(dòng)機(jī)各相繞組的電路,其電路的形式和步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)、型號(hào)及控制方式有關(guān)。該系統(tǒng)的步進(jìn)電動(dòng)機(jī)采用三相六拍勵(lì)磁方式,三相繞組的導(dǎo)電次序?yàn)閁→UV→V→VW→W→WU→U。進(jìn)給脈沖CLK到來(lái)之前,進(jìn)給脈沖分配器先復(fù)位,再通過(guò)定時(shí)開(kāi)關(guān)S2將其置成QUQVQW=100,即DU=1,DV=1,DW=0,第一個(gè)CLK脈沖過(guò)后,環(huán)形分配器輸出為QUQV,QW=110,由此可列出進(jìn)給脈沖分配器各輸出端和驅(qū)動(dòng)端狀態(tài)如表2所示。各觸發(fā)器驅(qū)動(dòng)端的驅(qū)動(dòng)方程式分別為:
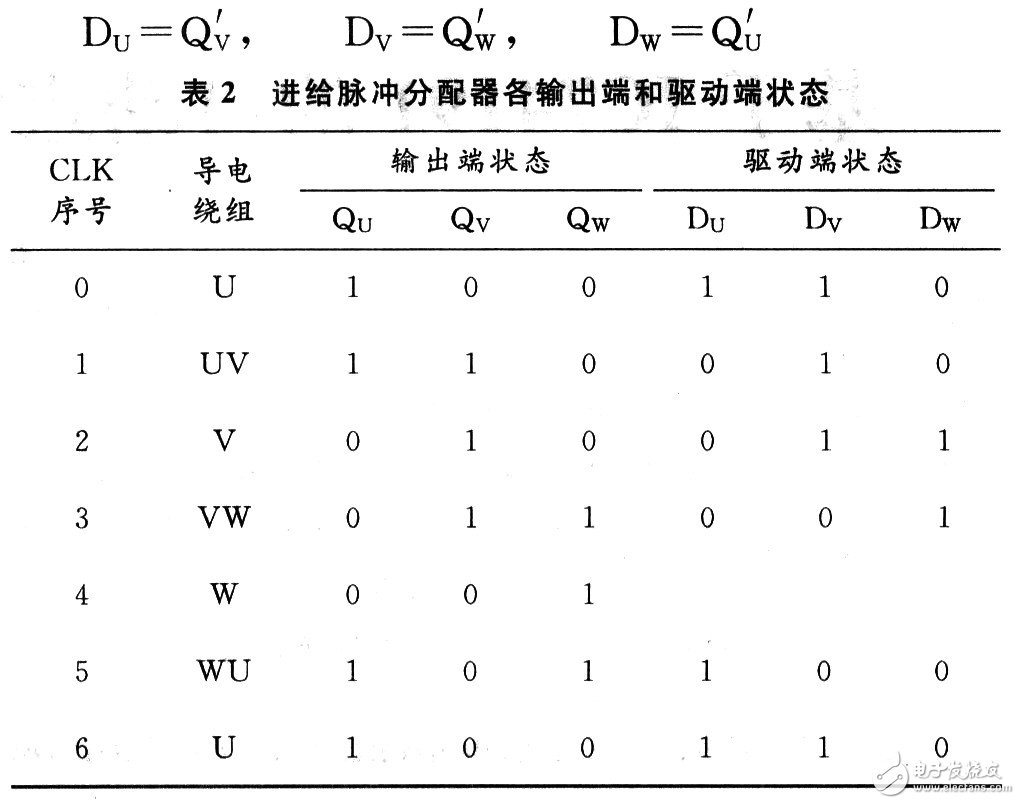
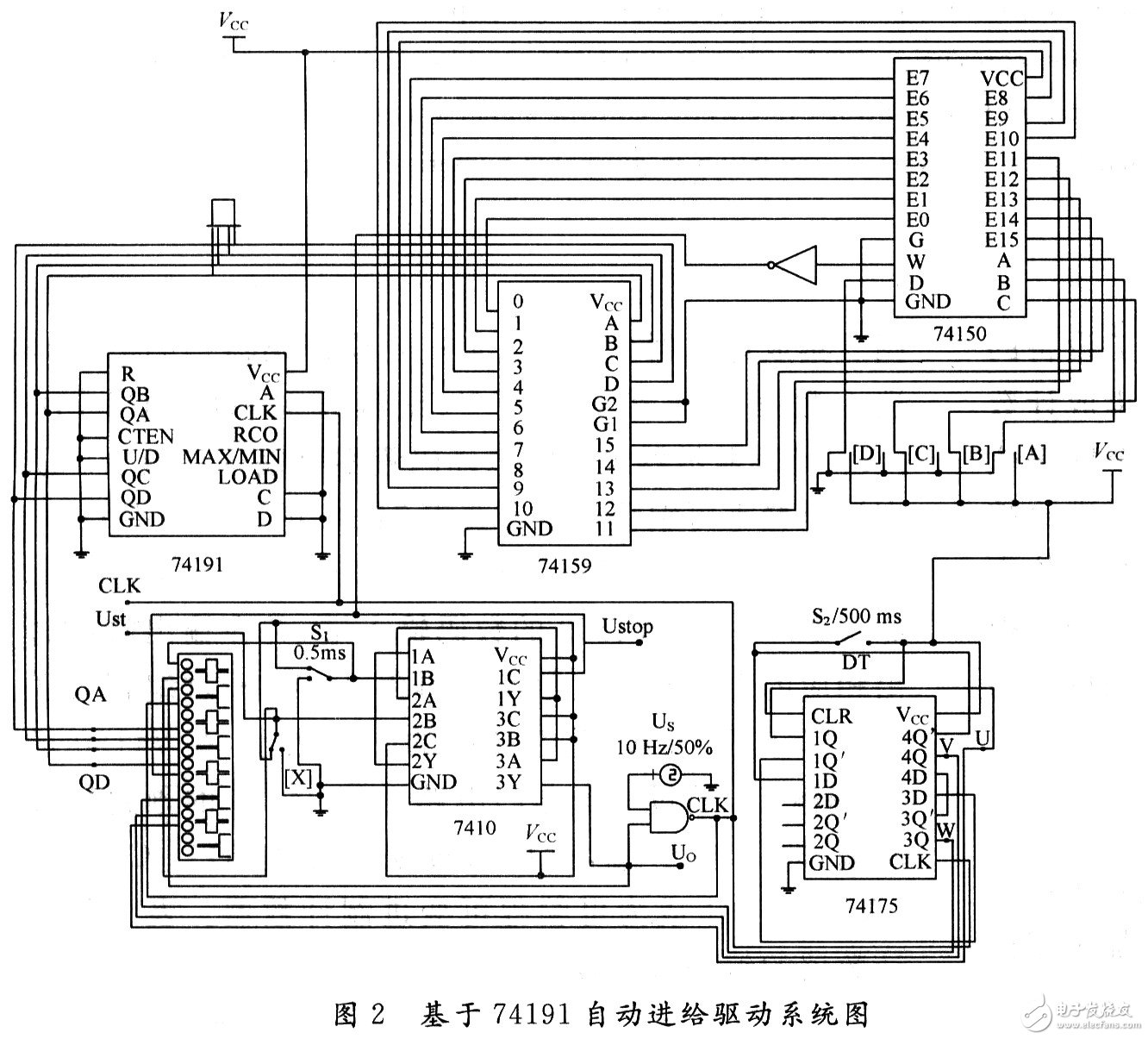
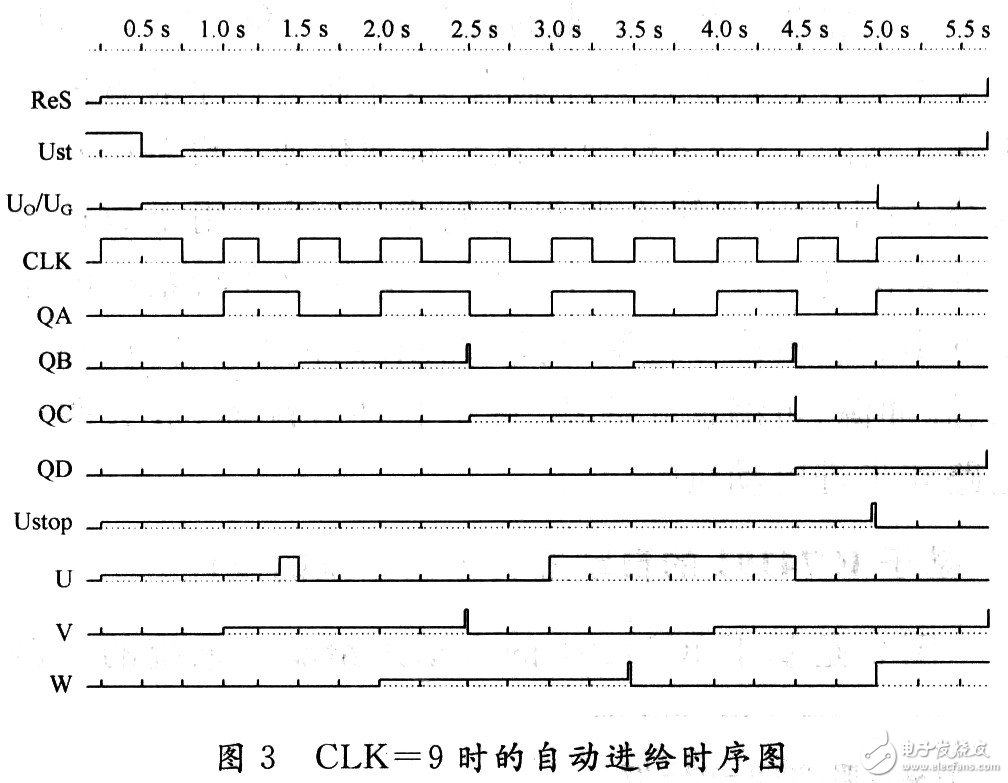
圖3是進(jìn)給當(dāng)量CLK=9時(shí)的工作時(shí)序圖。接通電源時(shí),常開(kāi)延時(shí)打開(kāi)定時(shí)開(kāi)關(guān)S1,ontime=0.5 ms然后打開(kāi),其輸出接計(jì)數(shù)器清零端RD,實(shí)現(xiàn)通電清零。同時(shí)定時(shí)開(kāi)關(guān)S2將進(jìn)給脈沖分配器置成QUQVQW=110,當(dāng)?shù)毒哌\(yùn)動(dòng)到預(yù)定位置時(shí),位置檢測(cè)電路便會(huì)發(fā)出進(jìn)給啟動(dòng)負(fù)脈沖信號(hào)Ust,該信號(hào)通過(guò)7410構(gòu)成的RS觸發(fā)器在7410的引腳8輸出高電平Uo,將控制門(mén)G打開(kāi),使時(shí)鐘脈沖CLK通過(guò)G門(mén)達(dá)到74163的時(shí)鐘輸入端,開(kāi)始進(jìn)行進(jìn)給計(jì)數(shù);同時(shí)該時(shí)鐘脈沖經(jīng)過(guò)進(jìn)給脈沖分配器、功率放大電路,驅(qū)動(dòng)自動(dòng)進(jìn)給執(zhí)行元件步進(jìn)電機(jī);當(dāng)?shù)毒哌_(dá)到預(yù)置進(jìn)給位置時(shí),利用74163的LOAD’端出現(xiàn)的下跳信號(hào)Ustop,作用在RS觸發(fā)器上,并在7410的引腳8輸出低電平,關(guān)閉控制門(mén)G,時(shí)鐘脈沖被禁止,步進(jìn)電動(dòng)機(jī)停止轉(zhuǎn)動(dòng),完成一個(gè)自動(dòng)進(jìn)給工作周期。
3 、自動(dòng)進(jìn)給控制系統(tǒng)的仿真
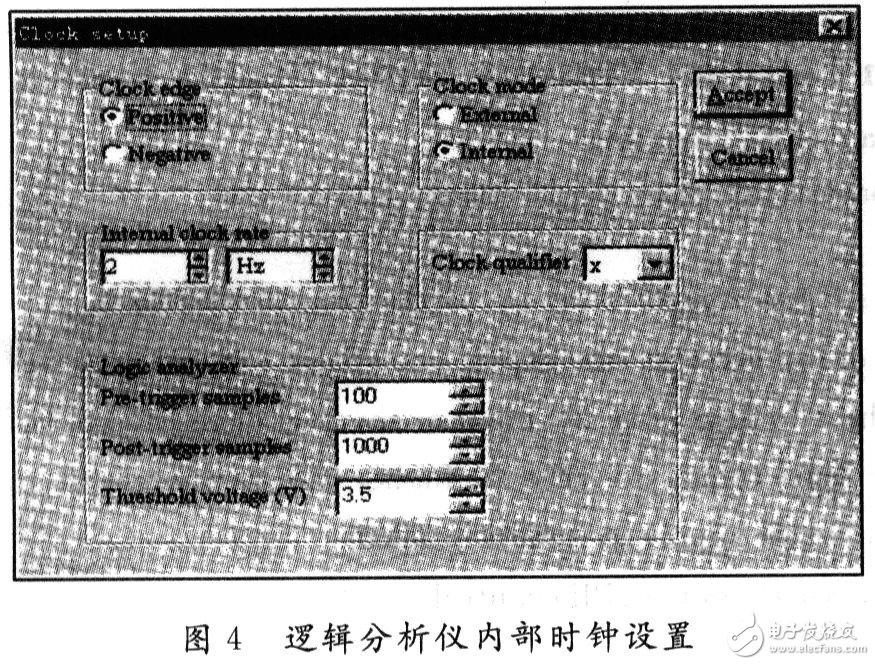
對(duì)圖2所示的數(shù)控機(jī)床自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)進(jìn)行計(jì)算機(jī)仿真實(shí)驗(yàn),雙擊虛擬數(shù)字邏輯分析儀圖標(biāo),打開(kāi)Clock setup對(duì)話框,調(diào)節(jié)內(nèi)部時(shí)鐘設(shè)置,如圖4所示,使Internal clock rate=2 Hz,通過(guò)編程開(kāi)關(guān)設(shè)定進(jìn)給量,接通電源后,按轉(zhuǎn)換開(kāi)關(guān)[X]鍵,發(fā)出位置檢測(cè)負(fù)脈沖信號(hào),自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)開(kāi)始工作,虛擬數(shù)字邏輯分析儀得到圖3所示各點(diǎn)的波形。進(jìn)給脈沖的個(gè)數(shù)可由七段譯碼顯示器LED顯示,見(jiàn)圖2。當(dāng)編程開(kāi)關(guān)取值[D][C][B][A]=1111,輸出15個(gè)進(jìn)給脈沖。仿真與實(shí)驗(yàn)結(jié)果完全符合設(shè)計(jì)要求。
4 、結(jié) 語(yǔ)
步進(jìn)電動(dòng)機(jī)自動(dòng)進(jìn)給驅(qū)動(dòng)系統(tǒng)是數(shù)控機(jī)床的核心部件,進(jìn)給量的控制采用可編程可變進(jìn)制計(jì)數(shù)器,編程邏輯開(kāi)關(guān)代替機(jī)械波段開(kāi)關(guān),便于聯(lián)機(jī)聯(lián)網(wǎng)運(yùn)行,提高工作穩(wěn)定性、可靠性和使用壽命;利用EDA軟件對(duì)數(shù)控機(jī)床自動(dòng)進(jìn)給系統(tǒng)研究和設(shè)計(jì),可根據(jù)工藝要求方便地改變電路及參數(shù),觀測(cè)仿真結(jié)果,縮短了設(shè)計(jì)周期,為電路的設(shè)計(jì)與實(shí)現(xiàn)提供了基本依據(jù)。
-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
74文章
4109瀏覽量
96211 -
eda
+關(guān)注
關(guān)注
71文章
2755瀏覽量
173213 -
驅(qū)動(dòng)系統(tǒng)
+關(guān)注
關(guān)注
3文章
370瀏覽量
26932
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
控制步進(jìn)電動(dòng)機(jī)
詳細(xì)介紹基于DSP步進(jìn)電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)
詳細(xì)介紹基于DSP步進(jìn)電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)
步進(jìn)電動(dòng)機(jī)及其控制方式
如何使用L298N電動(dòng)機(jī)驅(qū)動(dòng)器控制步進(jìn)電動(dòng)機(jī)
如何利用單片機(jī)I/O口去驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)呢
步進(jìn)電動(dòng)機(jī)概述
步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)
步進(jìn)電動(dòng)機(jī)的驅(qū)動(dòng)器電路實(shí)例
步進(jìn)電動(dòng)機(jī)微機(jī)控制
步進(jìn)電動(dòng)機(jī)的測(cè)試方法
步進(jìn)電動(dòng)機(jī)的選擇方法
步進(jìn)電動(dòng)機(jī)的應(yīng)用實(shí)例
步進(jìn)電動(dòng)機(jī)及其驅(qū)動(dòng)控制系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論