 基于DSP和CAN總線實現移動機器人超聲測距系統的軟硬件設計
基于DSP和CAN總線實現移動機器人超聲測距系統的軟硬件設計
介紹了自行設計的移動機器人CASIA-I中超聲測距系統的軟、硬件,以及超聲測距數據與上位機通信的設計和實現過程。該系統以DSP—TMS320LP2407A作為核心處理器,以CAN總線為基礎,實現了上述功能。經實驗驗證,測距范圍為0.45m~3.5m,系統測距精度在0.7%以內,可以滿足移動機器人室內導航的要求。
移動機器人要實現在未知和不確定環境下運行,必須具備自動導航和避障功能。在移動機器人的導航系統中,傳感器起著舉足輕重的作用。視覺、激光、紅外、超聲傳感器等都在實際系統中得到了廣泛的應用。其中,超聲波傳感器以其信息處理簡單、速度快和價格低,被廣泛用作移動機器人的測距傳感器,以實現避障、定位、環境建模和導航等功能。
傳統的輪式移動機器人超聲數據采集系統大多采用單片機作為微處理器,以此來測量移動機器人到障礙物的距離,并將距離通過串口傳輸到上位機。采用這種設計,系統制作簡單、成本低。但是,對于多超聲傳感器測距系統,如果仍采用單片機來完成測距任務,由于系統中超聲傳感器數量較多,為保證系統的實時性,就需要多個單片機才能完成數據采集,這使得采集系統不可避免地存在設計復雜和一些算法難以實現等缺陷。隨著微電子工藝的發展,數字信號處理器(DSP)的應用領域已從通信行業拓展到工業控制領域。TI公司推出的TMS320LF2407A是專門針對控制領域應用的DSP,它具有高速信號處理和數字控制功能所必需
的體系結構,其指令執行速度高達40MIPS,且大部分的指令都可以在一個25ns的單周期內執行完畢。另外,它還具有非常強大的片內I/0端口和其它外圍設備,可以簡化外圍電路設計,降低系統成本。正是基于這種思想,中國科學院自動化研究所在國家“863”計劃的支持下,利用多DSP和嵌入式PCI04自行設計和研制了輪式移動機器人CASIA-I。本文著重介紹其超聲數據采集系統,同時對通過CAN總線完成的超聲數據與上位機通訊的原理和設計過程進行分析說明,并給出實驗結果。
1 超聲測距原理
超聲測距的原理較簡單,一般采用渡越時間法,即:
D=ct/2 (1)
其中D為移動機器人與被測障礙物之間的距離,c為聲波在介質中的傳輸速率。聲波在空氣中傳輸速率為:

其中,T為絕對溫度,c。=331.4m/s。在不要求測距精度很高的情況下,一般可以認為c為常數。渡越時間法主要是測量超聲發射到超聲返回的時間間隔t,即“渡越時間”,然后根據式(1)計算距離。
2 系統硬件設計
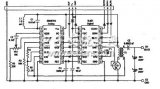
在距地面高度為45cm、相隔為22.5°的同一環上均勻分布著16個Polaroid生產的超聲傳感器,其編號為1#~16#(逆時針安排),超聲傳感器波束角為30°,超聲傳感器的最小作用距離為0.45m。超聲數據采集板主要有兩大模塊:一是16路超聲傳感器的超聲波發射和回波的接收模塊,二是與上位機(機器人中央控制器)的CAN總線通訊模塊。其硬件結構見圖1。
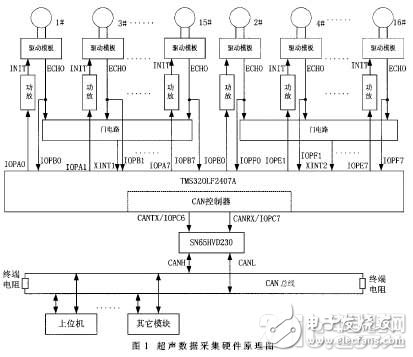
TMS320LF2407A向I/0端口發出控制信號,啟動內部定時器進行計時。此控制信號經功率放大后作為超聲傳感驅動電路的啟動信號(1NIT),超聲傳感器產生的、遇到障礙物時返回的高頻振蕩信號經放大(為彌補傳播過程中信號的衰減)使超聲傳感驅動電路的ECHO端產生高電平脈沖。ECHO電平變化經過門電路后引起TMS320LF2407A外部中斷,在中斷程序內獲取定時器的計數值,根據式(1)計算距離;否則,認為傳感器前方探測范圍內無障礙物。
因為超聲傳感器之間的安裝位置相差22.5°,而超聲傳感器的波束角為30°,如果超聲波同時發射,必然會有干擾。如果采用輪循方式,即一個接一個地發射超聲波,雖然可以消除串擾回波的影響,但是16個超聲傳感器輪循一次周期較長,降低了采集頻率。為了在不降低采集頻率的同時消除超聲的相互干擾,本系統將16個超聲傳感器分成A(1#、3#、5#、7#、9#、11#、13#、15#)和B(2#、4#、6#、8#、10#、12#、14#、16#)兩組,因為同一組內的兩個超聲傳感器安裝位置相差45°,通過計算可以知道,這種情況下超聲傳感器同時工作不會產生干擾,因而每一組里的超聲傳感器同時工作,組與組之間則采用輪循方式工作。這樣既可以達到很高的采集頻率,同時也滿足了系統的實時性要求。每組8個超聲傳感器的ECHO端分別連接到一門電路,然后通過門電路連接DSP的XINTl和XINT2端。XINTl/2引腳電平發生跳變時會產生外部中斷,通過I/0口可以知道是哪個或哪幾個傳感器引起中斷。
TMS320LF2407A內部集成了CAN控制器,通過它可以方便地構成CAN控制局域網絡。TMS320LF2407A的CANTX和CANRX接口與CAN收發器SN65HVD230相連,通過SN65HVD230連接CAN總線。SN65HVD230是TI公司生產的專門針對240X系列DSP內CAN控制器與物理總線
的接口。它的供電電壓和TMS320LF2407A一樣,僅為3.3V。由于CAN總線的數據通信具有突出的可靠性、實時性和靈活性,最高傳輸速率可達到1Mbps。超聲采集板的數據能夠快速、可靠地傳給中央控制器。
3 軟件設計
系統軟件主要由兩部分構成,即超聲數據采集與處理模塊、CAN總線通訊模塊。
3.1 多路超聲傳感器數據采集模塊
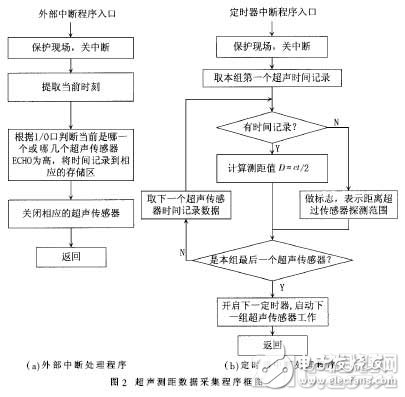
超聲傳感器被分為兩組,兩組循環交替工作。軟件設計上采用兩個定時器依次工作,分別對兩組傳感器進行計時。選擇定時器的周期比超聲傳感器探測最大距離所需的渡越時間稍長。在每個定時器周期開始時,觸發一組超聲傳感器同時開始工作。在定時器周期內,每個回波返回,都會觸發一次外部中斷(XINTl或XINT2中斷),在外部中斷處理程序內,將超聲波返回時間進行紀錄,并將相應的超聲傳感器關閉。外部中斷處理程序非常簡短,本系統只用了不到20條指令,并且TMS320LF2407A指令執行速度很快,因而即使因進入外部中斷處理程序而延誤了對后來回波的處理,但這種延誤的時間根據計算不大于0.5μs,由此引入的距離誤差根據(1)式計算小于83.5×10-6m。可見誤差非常小,可以忽略不計。當定時器中斷時,對于距離大于最大超聲探測范圍的,沒有相應的時間記錄,給它們加上超出測距范圍的標志。其它的時間數據都有記錄,根據(1)式計算距離,然后啟動下一個定時器工作,并觸發下一組超聲傳感器。本文的超聲傳感器的最大探測距離為3.5m,因而超聲波探測的最長時間為20.58ms。所以每個定時器的周期選為20.6ms。圖2只畫出了一組超聲傳感器的處理框圖,另一組與此相同,不再贅述。
由于受環境溫度、濕度的影響,超聲傳感器的測量值與實際值總有一些誤差,表1列出了本超聲測距系統測量值與對應的實際值。采用最小二乘法對表1的數據進行擬合,結果為:
y=O.9986x+0.2111
式中,x為測量值,y為實際值。

3.2 基于CAN總線的數據通信
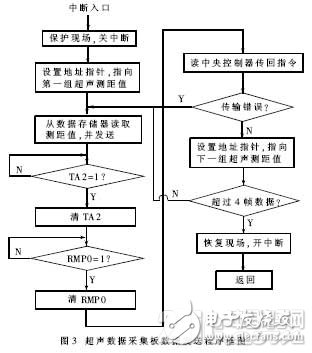
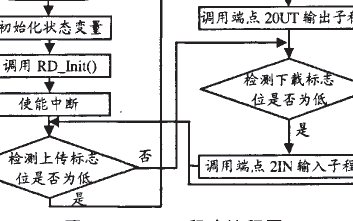
超聲數據采集板發送測距數據以中斷的方式完成。TMS320LF2407A有專門的mailbox中斷,用于響應發送/接收中斷。每個超聲傳感器的測距值在DSP內用兩個字節存儲,而CAN總線傳輸標準要求每個數據幀最多只能傳輸8個字節的數據。本系統共有16個超聲傳感器,共有32個字節存儲所有測距值。CAN總線傳輸所有測距值需要4個數據幀才能傳送完。本系統的通訊過程為:中央控制器發送遠程請求,超聲數據采集板進入接收中斷,在中斷服務程序內,采用查詢方式發送4幀數據,每幀數據包含4個超聲傳感器的測距值。本系統采用的波特率是500kbps。TMS320LF2407A用mailbox0接收中央控制器的遠程請求幀,用mailbox2發送測距數據值。圖3是超聲數據采集板的發送數據中斷服務程序框圖。其中,TA2是對應mailbox2發送數據幀完成的標志位,RMP0是對應mailbox0接收數據幀的標志位。關于TMS320LF2407A的CAN模塊的具體說明,在此不作具體介紹。
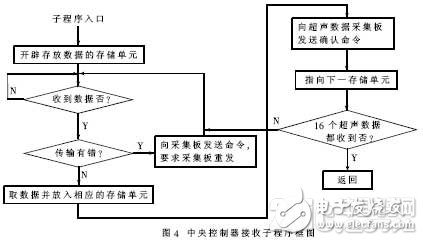
中央控制器接收子程序由VC++編寫。當機器人需要新的測距值時,即調用此子程序。程序框圖見圖4。接收程序收到一幀數據后,判斷數據是否有錯,若有錯,則向采集板發送命令,要求重發此幀數據;若正確,發送確認命令,要求采集板發送下一組數據,直到所有的超聲測距數據都接收完。
本文介紹的超聲數據采集系統采用TMS320LF2407A為核心處理器,可以達到很高的采集速率和精度。通過CAN總線通訊,可以將測距值以很高的波特率可靠地發送給機器人中央控制器。此系統已經在自行設計的智能移動機器人CASIA-I上得到了實際應用。實驗驗證了硬件系統的可靠性和算法的有效性。
-
處理器
+關注
關注
68文章
19342瀏覽量
230227 -
dsp
+關注
關注
553文章
8030瀏覽量
349319 -
機器人
+關注
關注
211文章
28501瀏覽量
207473
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論