") 基于Matlab雙饋調(diào)速系統(tǒng)仿真模型的建立與研究分析
基于Matlab雙饋調(diào)速系統(tǒng)仿真模型的建立與研究分析
1.雙饋調(diào)速系統(tǒng)的構(gòu)成
對(duì)于繞線式異步電機(jī),定子接有固定頻率(50Hz)的工業(yè)電源,轉(zhuǎn)子側(cè)接有頻率、幅值、相位可調(diào)的變頻器電源后即構(gòu)成雙饋調(diào)速系統(tǒng)。在電動(dòng)機(jī)的轉(zhuǎn)軸上裝上轉(zhuǎn)子頻率檢測(cè)器測(cè)出轉(zhuǎn)差頻率,利用此信號(hào)及矢量控制技術(shù)即可實(shí)現(xiàn)對(duì)變頻電源輸出電壓(電流)幅值、頻率及相位的控制,并使異步電機(jī)的調(diào)速性能幾乎與直流電動(dòng)機(jī)調(diào)速性能相媲美。
2.矢量控制的理論基礎(chǔ)
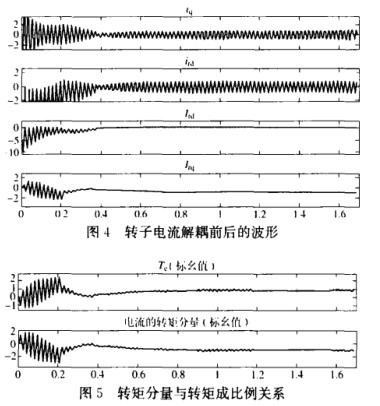
為達(dá)到良好的調(diào)速性能對(duì)雙饋電機(jī)采取先進(jìn)的矢量控制技術(shù)。矢量控制的實(shí)質(zhì)是在交流電機(jī)里構(gòu)建出直流電機(jī)的模型,用直流電機(jī)的調(diào)速方法對(duì)其調(diào)速,而為了對(duì)真實(shí)的可控量進(jìn)行控制,又須將其變換到原來(lái)所在坐標(biāo)系的坐標(biāo)。具體的實(shí)現(xiàn)方法是先求出定子磁鏈的方向,并以該方向?yàn)橥叫D(zhuǎn)坐標(biāo)系的dc軸,超前其90o的方向?yàn)閝c軸,這樣就構(gòu)成了dc-qc同步旋轉(zhuǎn)坐標(biāo)系。對(duì)轉(zhuǎn)子電流進(jìn)行了從三相到兩相變換后,再將其變換到同步坐標(biāo)系下,轉(zhuǎn)子電流就被解耦成了一對(duì)轉(zhuǎn)矩分量和激磁分量。前者位于qc軸,電磁轉(zhuǎn)矩只和該值有關(guān);后者位于dc軸,起到激磁的作用,可改善定子側(cè)的功率因數(shù)。
3.控制系統(tǒng)結(jié)構(gòu)
轉(zhuǎn)子電流經(jīng)過(guò)解耦后,就可用直流調(diào)速的方法對(duì)其進(jìn)行控制。在控制系統(tǒng)中,給定量是轉(zhuǎn)速,受控量是電磁轉(zhuǎn)矩(轉(zhuǎn)子電流的轉(zhuǎn)矩分量)。為了實(shí)現(xiàn)轉(zhuǎn)速和電流兩種負(fù)反饋分別起作用,在系統(tǒng)中設(shè)置了兩個(gè)調(diào)節(jié)器,分別調(diào)節(jié)轉(zhuǎn)速和電流,兩者之間實(shí)行串級(jí)聯(lián)接,把轉(zhuǎn)速調(diào)節(jié)器的輸出當(dāng)作電流調(diào)節(jié)器的輸入,再用電流調(diào)節(jié)器的輸出去控制晶閘管變流器的觸發(fā)裝置。轉(zhuǎn)速調(diào)節(jié)器的作用是對(duì)轉(zhuǎn)速的抗擾調(diào)節(jié)并使之在穩(wěn)態(tài)時(shí)無(wú)靜差,其輸出限幅值決定允許的最大電流。電流調(diào)節(jié)器的作用是電流跟隨,過(guò)流保護(hù)和及時(shí)抑制。
為了獲得良好的動(dòng)、靜態(tài)性能,雙閉環(huán)調(diào)速系統(tǒng)的兩個(gè)調(diào)節(jié)器一般都采用PI調(diào)節(jié)器。兩個(gè)調(diào)節(jié)器的輸出都是帶限幅的,轉(zhuǎn)速調(diào)節(jié)器ASR的輸出限幅(飽和)電壓是Uin*,它決定了電流調(diào)節(jié)器給定電壓的最大值,電流調(diào)節(jié)器ACR的輸出限幅電壓是Uctm,它限制了晶閘管變流器輸出電壓的最大值。
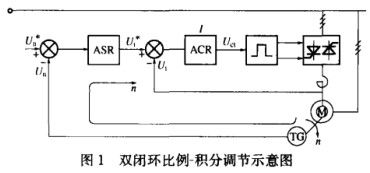
圖 1雙閉環(huán)比例-積分調(diào)節(jié)示意圖
雙饋系統(tǒng)的仿真模型包括電機(jī)模塊、控制系統(tǒng)模塊、變頻器模塊。
(1)電機(jī)模塊
Matlab中已經(jīng)建立了異步電機(jī)模型,轉(zhuǎn)子方面的各參量均折合到定子側(cè),并用上標(biāo)撇號(hào)表示,其等效電路模型為
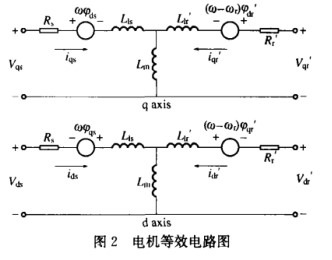


該對(duì)話框里沒(méi)有電機(jī)定、轉(zhuǎn)子電壓變比關(guān)系一項(xiàng),在此數(shù)學(xué)模型中這一信息也無(wú)法體現(xiàn)。比如,定轉(zhuǎn)子的額定電壓分別是6000伏、1640伏,但當(dāng)仿真定子側(cè)接6000伏電壓、轉(zhuǎn)子側(cè)開(kāi)路這種狀態(tài)時(shí),轉(zhuǎn)子側(cè)的電壓也是6000伏,因此不宜將模型的轉(zhuǎn)子直接與變頻器模型直接相連。為了體現(xiàn)定轉(zhuǎn)子之間電壓、電流的變比關(guān)系,在轉(zhuǎn)子輸出端接一近似理想的三相兩繞組變壓器,該變壓器副邊的輸出作為轉(zhuǎn)子的輸出,變壓器的變比為定子側(cè)額定電壓與轉(zhuǎn)子側(cè)額定電壓的比值。
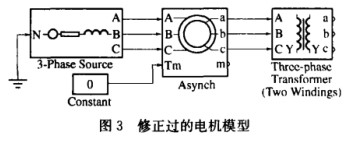
圖 3修正過(guò)的電機(jī)模型
(2)控制模塊
(3)變頻器模塊
變頻器一相的供電流回路模型如圖6所示,主要由兩組反并聯(lián)的晶閘管變流器和控制正負(fù)組封鎖與開(kāi)通的邏輯判斷電路聯(lián)接而成。變頻器正負(fù)組交替工作輸出交流電流,且兩組不可同時(shí)開(kāi)通,否則在正負(fù)組間形成很大的環(huán)流會(huì)將變頻器燒壞,為此需有可靠工作的控制正負(fù)組封鎖與開(kāi)通的邏輯判斷電路,即圖中的DLC模塊。在無(wú)環(huán)流交-交變頻器供電回路中,轉(zhuǎn)子電流過(guò)零點(diǎn)檢測(cè)是實(shí)現(xiàn)變頻調(diào)速的重要一環(huán),若不能準(zhǔn)確檢測(cè)出轉(zhuǎn)子電流過(guò)零,交流電流就不能正確輸出,導(dǎo)致轉(zhuǎn)子電流頻率不能追隨實(shí)際的轉(zhuǎn)差頻率,力矩電流偏離給定值,變頻調(diào)速失敗。
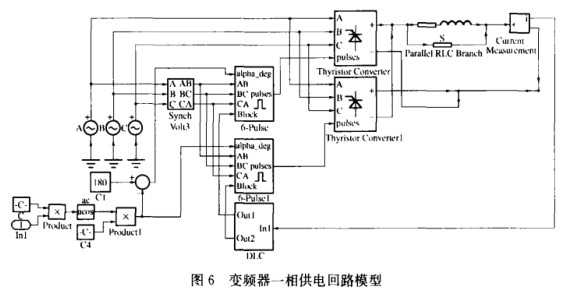
圖 6變頻器一相供電回路模型
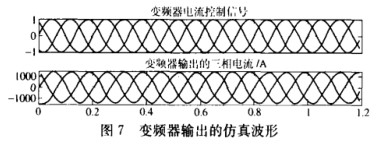
當(dāng)轉(zhuǎn)子電流大于0.5安培時(shí),判斷電流沒(méi)到零;小于0.5安培時(shí)須過(guò)1e-5 秒的延時(shí)后再次檢測(cè)電流,若仍小于0.5安,則認(rèn)為電流到零了否則認(rèn)為是干擾信號(hào)。判斷電流到零后需先封鎖當(dāng)前工作的變流器后再開(kāi)通另一組變流器,中間設(shè)置了1e-3秒的死區(qū)時(shí)間以防止在正負(fù)變流器之間出現(xiàn)環(huán)流。下圖是該變頻器模塊輸出的仿真波形(時(shí)間以秒為單位)。
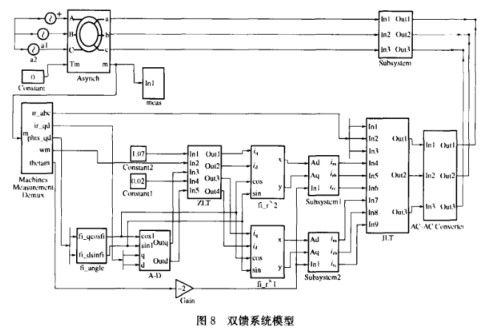
將修正了的電機(jī)模型、控制系統(tǒng)和變頻器連接起來(lái)便構(gòu)成了雙饋調(diào)速系統(tǒng)的模型如下圖8所示。速度的設(shè)定在Constant2方框中填寫(xiě), Constant1可填寫(xiě)轉(zhuǎn)子電流的激磁分量,設(shè)定為轉(zhuǎn)子電流的2%。
5.對(duì)實(shí)際系統(tǒng)的仿真分析
應(yīng)用該模型對(duì)實(shí)際雙饋調(diào)速系統(tǒng)進(jìn)行仿真分析以驗(yàn)證模型的合理性。該雙饋調(diào)速系統(tǒng)是中國(guó)環(huán)流器2號(hào)(HL-2A)的環(huán)向場(chǎng)電源供電系統(tǒng)。由兩套80MVA交流脈沖發(fā)電機(jī)組組成。每套機(jī)組由同軸的一臺(tái)6kV 2500kW 4極繞線式異步電動(dòng)機(jī),一個(gè)飛輪,一臺(tái)隱極式、4極、雙Y相移30o的3kV 80MVA脈沖同步發(fā)電機(jī)和一臺(tái)勵(lì)磁發(fā)電機(jī)組成,系統(tǒng)GD2為287 t·m2。環(huán)向磁場(chǎng)供電電源的工作原理是,由電動(dòng)機(jī)以低功率拖動(dòng)整個(gè)軸系轉(zhuǎn)到高轉(zhuǎn)速,將電網(wǎng)電能轉(zhuǎn)化成軸系的轉(zhuǎn)動(dòng)動(dòng)能,然后對(duì)發(fā)電機(jī)進(jìn)行快速勵(lì)磁并進(jìn)行適當(dāng)控制,發(fā)電機(jī)通過(guò)變流器以大功率放電,同時(shí)伴隨著軸系轉(zhuǎn)速迅速下降,軸系的轉(zhuǎn)動(dòng)動(dòng)能轉(zhuǎn)化為電能放出。
為增加該供機(jī)組的儲(chǔ)能與釋能,為這兩套機(jī)組的電動(dòng)機(jī)配備了在轉(zhuǎn)子側(cè)進(jìn)行變頻調(diào)速的交-交變頻器,以使電動(dòng)機(jī)以雙饋調(diào)速的方式將機(jī)組超同步運(yùn)行至1650rpm。機(jī)組的啟動(dòng)過(guò)程是,先由盤(pán)車(chē)機(jī)構(gòu)盤(pán)動(dòng)到2rpm,從2rpm到1476rpm則由電動(dòng)機(jī)并借助液體電阻滑差調(diào)節(jié)器來(lái)完成,當(dāng)轉(zhuǎn)速穩(wěn)定在1476rpm時(shí),將轉(zhuǎn)子從液體電阻切換到交-交變頻器,電動(dòng)機(jī)以雙饋?zhàn)冾l調(diào)速的方式將機(jī)組繼續(xù)加速至1650rpm。
已知實(shí)際系統(tǒng)的電動(dòng)機(jī)參數(shù)為:定、轉(zhuǎn)子額定電壓6000、1640伏,額定電流284、933安,額定轉(zhuǎn)速1476rmp。仿真中將轉(zhuǎn)速給定設(shè)為1515rmp,要求升速過(guò)程中定轉(zhuǎn)子電流、力矩為額定值,定子側(cè)功率因數(shù)95%以上。因?yàn)槭芊抡鏁r(shí)間與計(jì)算機(jī)內(nèi)存、仿真模型大小的限制,每次仿真時(shí)間最多可設(shè)為6秒鐘,因此只仿真了從1476“1477rmp、1498.5”1500.5rmp兩段,借此說(shuō)明投入變頻器和超同步兩段過(guò)程。仿真的結(jié)果如下圖所示:(以下仿真圖形的縱軸均以秒為時(shí)間單位)
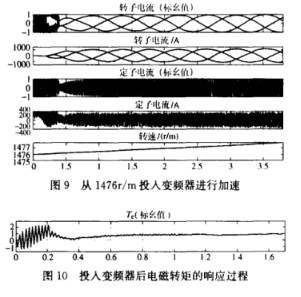
從圖9-11可以觀測(cè)到0.6秒時(shí)轉(zhuǎn)子電流、電磁轉(zhuǎn)矩升到0.7(標(biāo)么值),1秒鐘時(shí)升到1,并保持該轉(zhuǎn)矩加速。在超同步過(guò)程中定、轉(zhuǎn)子電流和轉(zhuǎn)矩仍保持在額定值1并測(cè)得定、轉(zhuǎn)子電流幅值為390安、1280安,與實(shí)際系統(tǒng)的定、轉(zhuǎn)子幅值401安、1319安非常接近,從圖12可以看出定子繞組的電流、電壓其相位幾乎一致,說(shuō)明功率因數(shù)很高。這些驗(yàn)證了該模型的正確性與參數(shù)選擇的合理性。
HL-2A裝置的極向場(chǎng)供電電源的結(jié)構(gòu)與環(huán)向場(chǎng)的類(lèi)似,該套機(jī)組原產(chǎn)日本,設(shè)計(jì)額定轉(zhuǎn)速就是3600rpm、電動(dòng)機(jī)工作頻率60Hz,但在我國(guó)的電網(wǎng)條件下只能運(yùn)行在最高轉(zhuǎn)速2991rpm,為充分利用該套機(jī)組的容量,也擬為其配備類(lèi)似的變頻裝置,所以這套雙饋調(diào)速系統(tǒng)的建模及仿真分析對(duì)125 MVA機(jī)組的雙饋調(diào)速系統(tǒng)容量等選取來(lái)說(shuō)具有直接的指導(dǎo)意義。
結(jié)束語(yǔ)
Matlab是當(dāng)今廣泛使用的仿真工具但實(shí)際使用中也會(huì)遇到一些諸如聯(lián)接不匹配的問(wèn)題,應(yīng)分析具體的原因找出解決的辦法。本文中的措施是行之有效的。
雙饋?zhàn)冾l調(diào)速系統(tǒng)可以有效提高定子側(cè)功率因數(shù)到1,另外雙饋?zhàn)冾l調(diào)速所需變頻器容量相對(duì)較小,在變頻器輸出頻率不高的場(chǎng)合有很高的應(yīng)用價(jià)值。
這套雙饋調(diào)速系統(tǒng)模型對(duì)研究類(lèi)似的問(wèn)題有一定的參考價(jià)值,仿真的結(jié)果可作為系統(tǒng)設(shè)計(jì)的參考,如變頻器容量、變頻器的供電電壓、電抗器的值、加速轉(zhuǎn)矩等有關(guān)量的設(shè)計(jì)。
-
電源
+關(guān)注
關(guān)注
184文章
17704瀏覽量
249964 -
matlab
+關(guān)注
關(guān)注
185文章
2974瀏覽量
230385 -
仿真
+關(guān)注
關(guān)注
50文章
4070瀏覽量
133552
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
交流勵(lì)磁雙饋風(fēng)力發(fā)電機(jī)雙PWM控制系統(tǒng)的仿真研究
雙饋風(fēng)力發(fā)電系統(tǒng)模型
基于Matlab的直流調(diào)速系統(tǒng)的仿真應(yīng)用
基于Matlab的雙饋異步風(fēng)力發(fā)電機(jī)風(fēng)電場(chǎng)仿真 相關(guān)資料分享
無(wú)刷雙饋發(fā)電機(jī)的matlab仿真模型研究 相關(guān)資料分享
SPWM變頻調(diào)速系統(tǒng)的MATLAB仿真相關(guān)資料分享
基于MATLAB的風(fēng)力發(fā)電系統(tǒng)仿真研究
matlab中電流調(diào)節(jié)器仿真模型,直流調(diào)速系統(tǒng)的matlab仿真
Matlab雙饋異步風(fēng)力發(fā)電機(jī)建模s函數(shù) 精選資料下載
電機(jī)調(diào)速系統(tǒng)的計(jì)算機(jī)仿真
雙閉環(huán)直流調(diào)速系統(tǒng)仿真
雙閉環(huán)直流調(diào)速系統(tǒng)仿真(MATLAB)
MATLAB在雙閉環(huán)直流調(diào)速控制系統(tǒng)教學(xué)中的應(yīng)用
Matlab直流調(diào)速系統(tǒng)仿真

雙閉環(huán)直流調(diào)速系統(tǒng)中電流環(huán)的仿真模型





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論