


1、引言
導彈的運動模型是一個十分復雜的非線性變參數模型。反饋線性化是一種重要的非線性控制方法,其基本思想是通過狀態變換,將一個非線性系統的動態特性全部或部分變換成線性特性,從而用成熟的線性控制方法來解決問題。實現反饋線性化通常有兩種方法:微分幾何和動態逆方法。微分幾何方法需要數學工具很多,不宜工程上的推廣和應用;相比較而言,動態逆方法直觀、簡便,在工程應用上,更易于實現。
在實際應用中,Kim等將導彈動力學分成快變和慢變兩個動力學子系統,然后對兩個子系統分別采用動態逆方法進行設計。Schumacher對該方法進行了穩定性分析,并指出當內回路帶寬足夠大并且執行機構不飽和時,可保證系統的穩定。該方法突出的缺點是設計的控制系統魯棒性比較差。
由于動態逆方法需要被控對象精確的數學模型,但在實際應用中,被控對象數學模型不可能精確得到。這是造成動態逆控制系統魯棒性差最主要的原因。本文根據以上文獻的設計思想,將導彈的動力學方程分解成為快慢兩個動力學子系統,對兩個子系統分別進行動態逆設計。其中,快回路采用基于神經網絡的自適應滑模逆控制器的設計方法,應用李亞普諾夫綜合法,設計出神經網絡控制器,并給出神經網絡權值更新算法。仿真結果驗證了本文方法的正確性。
2、導彈的動力學模型
為了便于利用成熟的線性控制系統設計理論進行設計與分析,通常將上述彈體模型進行簡化,為此需要作如下假設:
(1)僅考慮導彈的短周期運動,認為導彈運動速度變化緩慢,可將導彈飛行速度視為常數。
(2)對于彈體運動過程中的攻角和側滑角等小量參數,可以略去它們之間的乘積并簡化三角函數的高次項,即認為

(3)忽略舵機的非線性,忽略速率陀螺和加速度計的動態特性。
(4)僅考慮空氣動力和推力的作用,忽略重力的影響,在設計過程中這可以通過在控制指令中增加重補進行補償。
在以上假設條件下,得到如下的彈體簡化模型:
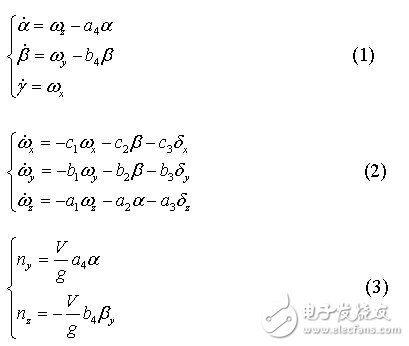
式中各動力學系數
3、按時標分離原則生成子系統
以俯仰通道穩定回路為例來說明本文的設計思想。俯仰通道的簡化模型為:
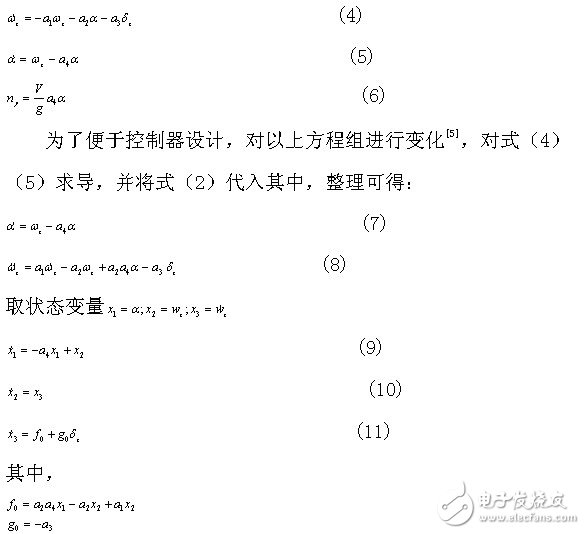
從而得到了以縱向攻角、彈體俯仰角速度和角加速度為狀態變量,以縱向過載為輸出的狀態方程。
根據上述狀態方程,按照時標分離的方法,將彈體的縱向通道分成快慢兩個動力學子系統。其中,式(9)代表慢變子系統,式(10)、(11)代表快變子系統。下面對兩個子系統分別進行動態逆設計。
4、動態逆控制器設計
4.1 慢變子系統動態逆設計
對于慢變子系統采用傳動的動態逆設計方法。根據時標分離的控制策略,慢變子系統的控制量為快變子系統的輸出量

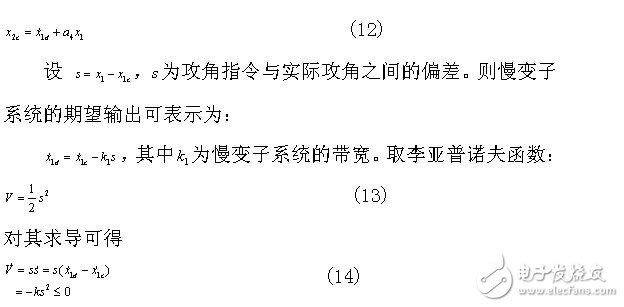
因此慢變子系統穩定。
4.2 快變子系統動態逆設計
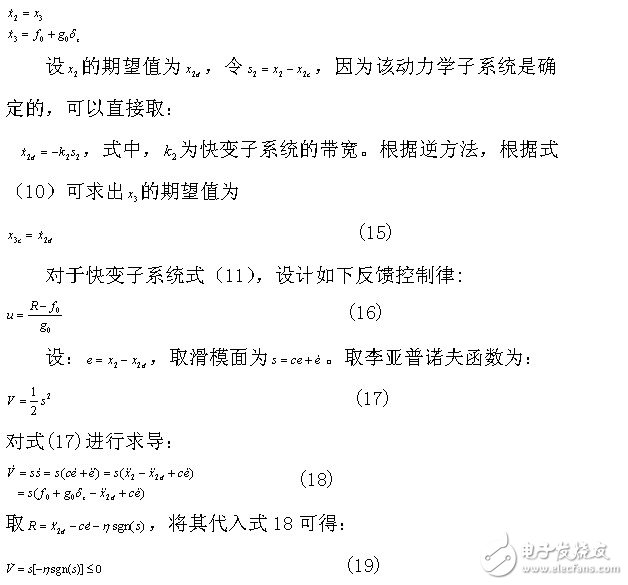
對于式7、8式組成的狀態方程
從而,所設計的控制律能夠保證系統的穩定性。
4.3 快變子系統自適應滑模逆控制器設計
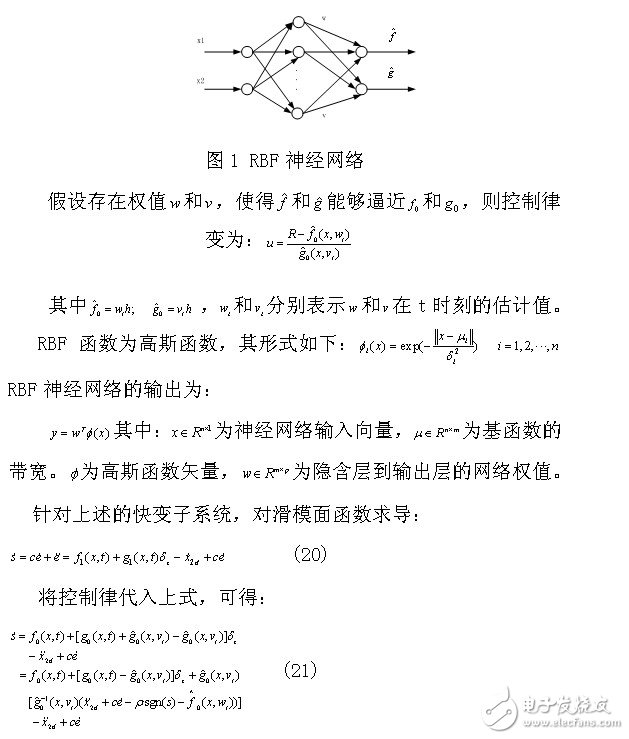
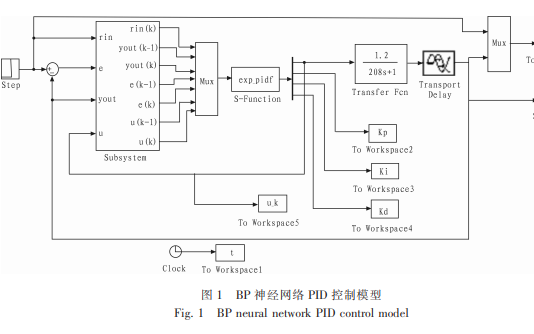
在導彈飛行控制中,由于參數變化劇烈, 和 無法準確得到。RBF神經網絡對非線性系統具有唯一最佳逼近的特性。所以,構造RBF神經網絡,使其輸出 和 來逼近 和 。RBF網絡模型如圖1所示:
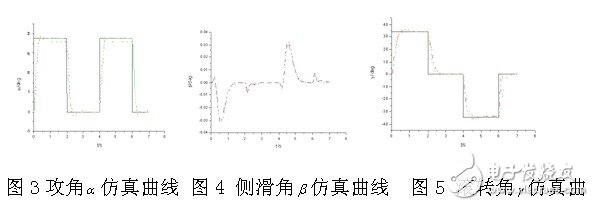
5、仿真結果分析
6、結論
基于導彈非線性控制模型,應用時標分離動態逆方法設計了一種非線性導彈控制系統。該方法通過引入神經網絡,將動態逆方法與自適應滑模控制相結合,有效的消除了建模誤差對整個系統的不利影響,增強了控制系統的魯棒性,適合于復雜的導彈控制系統設計,具有良好的應用前景。
-
控制器
+關注
關注
114文章
17247瀏覽量
185364 -
神經網絡
+關注
關注
42文章
4814瀏覽量
104394 -
仿真
+關注
關注
52文章
4315瀏覽量
136223
發布評論請先 登錄
如何利用SoPC實現神經網絡速度控制器?
基于BP神經網絡控制+Simulink雙閉環直流調速系統仿真設計
基于BP神經網絡的PID控制
基于RBF 的模糊神經網絡控制器設計與仿真分析
基于PLC的神經網絡PID控制器設計
神經網絡PID控制策略及其Matlab仿真研究
CMAC神經網絡模糊控制器設計

如何使用S函數實現BP神經網絡PID控制器及Simulink仿真的資料說明





 工商網監
工商網監

評論