") 利用FPGA和CPLD技術(shù)實(shí)現(xiàn)8位RISC微處理器的設(shè)計(jì)并進(jìn)行仿真分析
利用FPGA和CPLD技術(shù)實(shí)現(xiàn)8位RISC微處理器的設(shè)計(jì)并進(jìn)行仿真分析
20世紀(jì)80年代初興起的RISC技術(shù)一直是計(jì)算機(jī)發(fā)展的主流,RISC微處理器的一些基本理論則是計(jì)算機(jī)領(lǐng)域的重要基礎(chǔ)常識(shí),但具體實(shí)現(xiàn)仍有難度。電子設(shè)計(jì)自動(dòng)化(Electronic Design Automation,簡(jiǎn)稱EDA)是現(xiàn)代電子設(shè)計(jì)的核心技術(shù)。利用EDA技術(shù)進(jìn)行電子系統(tǒng)設(shè)計(jì)的主要目標(biāo)是完成專用集成電路(ASIC)的設(shè)計(jì),而現(xiàn)場(chǎng)可編程門陣列(FPGA)和復(fù)雜可編程邏輯器件(CPLD)是實(shí)現(xiàn)這一途徑的主流器件。現(xiàn)場(chǎng)可編程通用門陣列(Field Program mableGateArray,簡(jiǎn)稱FPGA)的內(nèi)部具有豐富的可編程資源。FPGA外部連線很少、電路簡(jiǎn)單、便于控制。FPGA目前已達(dá)千萬(wàn)門標(biāo)記(10million-gatemark),速度可達(dá)200~400MHz。本文介紹了一種基于FPGA技術(shù)用VHDL(VHSICHardw are Description Language)語(yǔ)言實(shí)現(xiàn)的8位RISC微處理器,并給出了仿真綜合結(jié)果。
微處理器功能、組成及指令集
本文設(shè)計(jì)的RISC微處理器遵循了RISC機(jī)器的一般原則:指令條數(shù)少而高效、指令長(zhǎng)度固定、尋址方式不超過(guò)兩種、大量采用寄存器、為提高指令執(zhí)行速度、指令的解釋采用硬聯(lián)線控制等等。
RISC微處理器的功能和組成
微處理器是整個(gè)計(jì)算機(jī)系統(tǒng)的核心,它具有如下基本功能:指令控制、操作控制、時(shí)間控制、數(shù)據(jù)加工。本文設(shè)計(jì)的微處理器主要由控制器、運(yùn)算器和寄存器組成,還包括程序計(jì)數(shù)器、譯碼器等一些其他的必要邏輯部件。控制器是發(fā)布命令的“決策機(jī)構(gòu)”,即完成協(xié)調(diào)和指揮整個(gè)計(jì)算機(jī)系統(tǒng)的操作。相對(duì)于控制器而言,運(yùn)算器接受控制器的命令而進(jìn)行動(dòng)作,即運(yùn)算器所進(jìn)行的全部操作都是由控制器發(fā)出的控制信號(hào)來(lái)指揮的,所以它是執(zhí)行部件。存儲(chǔ)器是記憶設(shè)備,存儲(chǔ)單元長(zhǎng)度是8位,用來(lái)存放程序和數(shù)據(jù)。
微處理器的指令集
微處理器的指令長(zhǎng)度為16位定長(zhǎng),每條指令占兩個(gè)存儲(chǔ)單元,尋址方式僅有立即尋址、直接尋址兩種。該RISC微處理器選取了使用頻度較高的8種指令LDA、STO、JMP、ADD、AND、XOR、SKZ、HLT等。指令操作碼占用指令字的高4位,預(yù)留了空間,便于以后指令集的擴(kuò)展。指令周期是由8個(gè)時(shí)鐘組成,每個(gè)時(shí)鐘都要完成固定的操作。部分典型指令的操作流程圖如圖1所示。
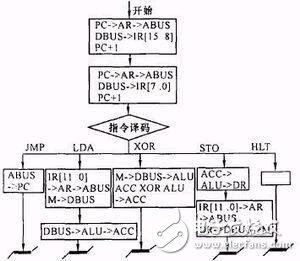
圖1部分指令操作流程
關(guān)鍵模塊的設(shè)計(jì)
RISC微處理器是一個(gè)復(fù)雜的數(shù)字邏輯電路,但其基本部件的邏輯并不復(fù)雜,可以把它分為時(shí)鐘產(chǎn)生器、指令寄存器、累加器、算術(shù)邏輯單元、數(shù)據(jù)控制器、狀態(tài)控制器、程序計(jì)數(shù)器、地址多路器等單元來(lái)考慮。在硬件驗(yàn)證時(shí)還需要建立一些如ROM/RAM和地址譯碼器等必要的外圍器件。以下是幾個(gè)關(guān)鍵模塊的設(shè)計(jì)。
時(shí)鐘產(chǎn)生器的設(shè)計(jì)

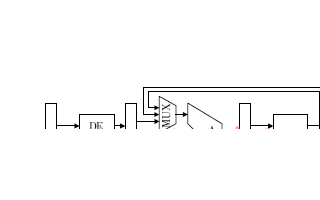
圖2時(shí)鐘產(chǎn)生器電路的設(shè)計(jì)
時(shí)鐘產(chǎn)生器Pulse產(chǎn)生的電路如圖2所示,計(jì)算機(jī)的協(xié)調(diào)動(dòng)作需要時(shí)間標(biāo)志,它用時(shí)序信號(hào)體現(xiàn),時(shí)鐘產(chǎn)生器正是產(chǎn)生這些時(shí)序信號(hào)的器件。圖2中時(shí)鐘產(chǎn)生器利用外來(lái)時(shí)鐘信號(hào)clk產(chǎn)生一系列時(shí)鐘信號(hào)clk1,fetch,aluclk等,并送往微處理器的其他部件。rst控制著微處理器的復(fù)位和啟動(dòng)操作,當(dāng)rst一進(jìn)入高電平,微處理器就結(jié)束現(xiàn)行操作,并且只要rst停留在高電平狀態(tài),微處理器就維持復(fù)位狀態(tài)。rst回到低電平后在接著到來(lái)的fetch上升沿啟動(dòng)微處理器開(kāi)始工作。
由于時(shí)鐘產(chǎn)生器對(duì)微處理器各種操作實(shí)施時(shí)間上的控制,所以其性能好壞從根本上決定了整個(gè)微處理器的運(yùn)行質(zhì)量。本設(shè)計(jì)采用的同步狀態(tài)機(jī)的設(shè)計(jì)方法,使得clk1,fetch,alu_clk在跳變時(shí)間同步性能上有顯著提升,為整個(gè)系統(tǒng)性能的提高打下良好的基礎(chǔ)。
狀態(tài)控制器的設(shè)計(jì)
狀態(tài)控制器的電路圖如圖3所示。從實(shí)現(xiàn)的途徑看,RISC微處理器與一般的微處理器的不同之處在于,它的時(shí)序控制信號(hào)的形成部件是用硬布線邏輯實(shí)現(xiàn)而不是采用微程序控制。由于器件本身設(shè)計(jì)比較復(fù)雜,且對(duì)各個(gè)控制信號(hào)的時(shí)序有嚴(yán)格要求,所以其VHDL程序用有限狀態(tài)機(jī)FSM來(lái)實(shí)現(xiàn)。
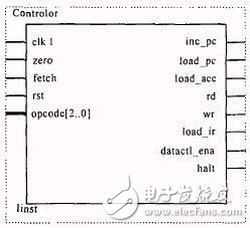
圖3狀態(tài)控制器電路
結(jié)構(gòu)體程序如下:
architecturertlofstatctlis
typemystateis(st0,st1,st2,st3,st4,st5,st6,st7);
signalcurstate:mystate;
begin
process(clk1,ena)
begin
iffallingedge(clk1)then
if(ena=’0’)then
curstate《=st0;incpc《=’0’;
load_acc《=’0’;loadpc《=’0’;
rd《=’0’;wr《=’0’;loadir《=’0’;
datactlena《=’0’;halt《=’0’;
else
casecurstateis
whenst0=》。..。..
whenst1=》。..。..
whenst2=》。..。..
whenst3=》cur_state《=st4;
if(opcode=hlt)then.。..。.
else.。..。.
whenst4=》curstate《=st5;
if(opcode=jmp)then.。..。.
elsif(opcode=addoropcode=ann
oropcode=“xoooropcode”=lda)then
elsif(opcode=sto)then.。.else.。.
whenst5=》curstate《=st6;
if(opcode=addoropcode=annor
opcode=“xoooropcode”=lda)
then.。..。.
elsif(opcode=skzandzero=’1’)
then.。..。.
elsif(opcode=jmp)then.。..。.
elsif(opcode=sto)then.。..。.
else.。..。.
whenst6=》curstate《=st7;
if(opcode=sto)then.。..。.
elsif(opcode=addoropcode=ann
oropcode=xoooropcode=lda)
then.。..。.
else.。..。.
whenst7=》curstate《=st0;
if(opcode=skzandzero=’1’)then.。..。.
else.。..。.
whenothers=》。..。..
endcase;
endif;
endif;
endprocess;
endrtl;
算術(shù)邏輯單元ALU的設(shè)計(jì)
ALU是絕大多數(shù)指令必須經(jīng)過(guò)的單元,所有的運(yùn)算都在算術(shù)邏輯單元ALU進(jìn)行。ALU接受指令寄存器IR送來(lái)的4位指令操作碼,根據(jù)不同的指令,ALU在信號(hào)alu_clk的正跳變沿觸發(fā)下完成各種算術(shù)邏輯運(yùn)算。微處理器各部件結(jié)構(gòu)如圖4所示。
軟件綜合與仿真和硬件實(shí)現(xiàn)
微處理器的軟件綜合與仿真
該微處理器設(shè)計(jì)共有11個(gè)基本模塊,除前文分析的3個(gè)模塊外,還有指令寄存器IR、累加器ACC、程序計(jì)數(shù)器PC、簡(jiǎn)單的存儲(chǔ)器ROM/RAM、地址多路器ADDR等模塊。所有的模塊采用Quartus4.2單獨(dú)綜合,并調(diào)試通過(guò),且都生成有單獨(dú)的*.bsf文件,最后創(chuàng)建一個(gè)頂層文件top.bdf,把所有基本模塊的bsf文件連接成如圖4的形式。做完頂層設(shè)計(jì)后,采用Quartus4.2進(jìn)行綜合與仿真。系統(tǒng)仿真的部分結(jié)果如圖5所示,從圖5可以看出,存放在存儲(chǔ)器不同地址中的2個(gè)操作數(shù)3CH(00111100)和18H(00011000)相異或時(shí),結(jié)果24H(00100100)在信號(hào)wr的上升沿觸發(fā)下存入存儲(chǔ)器中。我們可清楚地看到每條指令都是在一個(gè)指令周期中完成。數(shù)據(jù)總線data上記錄著指令的運(yùn)行情況,同時(shí)也可看到空閑時(shí)其呈高阻狀態(tài)。
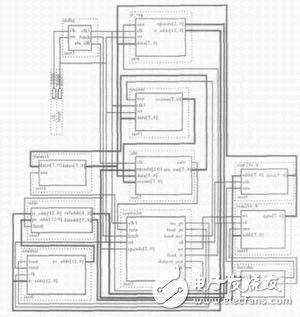
圖4微處理器各部件的結(jié)構(gòu)
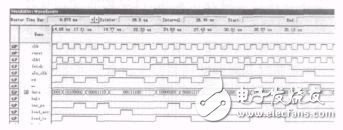
圖5仿真波形
主要的程序如下:
地址機(jī)器代碼匯編語(yǔ)言源程序
&
nbsp; 0011000000JMPL1;L1-》PC
0100000100
0410100000LDAR2;(0E)-》R2
0500001110
0610000000XORR1,R2;(R1)xor(R2)- 》(R1)
0700001111
0811000001STO;(R1)-》(0F)
0A00000000HLT;stop
0B00000000
0E00111100
0F00011000
微處理器的硬件實(shí)現(xiàn)
基于FPGA的RISC微處理器的最終硬件驗(yàn)證在杭州康芯公司生產(chǎn)的GW48EDA系統(tǒng)上進(jìn)行。前面的仿真結(jié)果確認(rèn)無(wú)誤后,選用GW48EDA系統(tǒng)的電路模式No.5,查閱此系統(tǒng)的引腳對(duì)照表鎖定各引腳,之后需重新編譯一次,以便把引腳鎖定信息編譯進(jìn)編程下載文件。最后把編譯好的top.sof文件對(duì)目標(biāo)器件FPGA下載,得到滿足設(shè)計(jì)要求的芯片。本設(shè)計(jì)的載體選用Altera公司的Cyclone系列FPGA器件EP1C6Q240C6,硬件驗(yàn)證結(jié)果表明,該RISC微處理器時(shí)鐘頻率為23.02MHz,其功能完全達(dá)到設(shè)計(jì)要求。
結(jié)束語(yǔ)
本文基于FPGA的微處理器具備了RISC微處理器的基本功能,而且其容易優(yōu)化升級(jí)。該微處理器不僅可作為一個(gè)模塊用于片上系統(tǒng)的設(shè)計(jì),而且也充分展示了使用FPGA和VHDL進(jìn)行EDA數(shù)字系統(tǒng)設(shè)計(jì)的優(yōu)越性,具有實(shí)用價(jià)值。
-
FPGA
+關(guān)注
關(guān)注
1629文章
21729瀏覽量
603050 -
cpld
+關(guān)注
關(guān)注
32文章
1248瀏覽量
169338 -
微處理器
+關(guān)注
關(guān)注
11文章
2259瀏覽量
82412
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
處理器及微處理器系統(tǒng)
基于AVR 8位微處理器的FSPLC微處理器SOC設(shè)計(jì)
基于80C186XL16位嵌入式微處理器的CPLD解決方案
FPGA技術(shù)如何用VHDL語(yǔ)言實(shí)現(xiàn)8位RISC微處理器?
求一種基于FPGA的微處理器的IP的設(shè)計(jì)方法
ARM微處理器介紹
ARM處理器設(shè)計(jì)RISC介紹(下)
16位低功耗微處理器的設(shè)計(jì)
通用微處理器功能驗(yàn)證中的仿真加速
一個(gè)針對(duì)FPGA的完全可配置嵌入式32位RISC處理器

新一代RISC微處理器ARM11的特點(diǎn)及關(guān)鍵技術(shù)
微處理器的發(fā)展概況
基于FPGA的VLIW微處理器基本功能實(shí)現(xiàn)設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論