 能實現電池反接校正的MAX4636,max4636 circuit
能實現電池反接校正的MAX4636,max4636 circuit
能實現電池反接校正的MAX4636,max4636 circuit
關鍵字:MAX4636
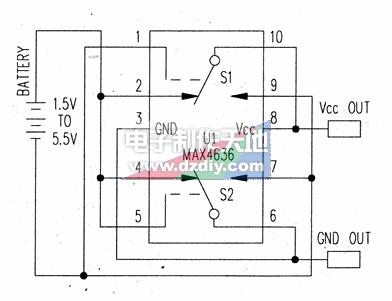
當電池如圖中所示正確連接時,上端的開關(S1)位于常閉狀態,因為控制輸入(引腳①)為低。引腳②到引腳⑩間的連接提供了一條從電池到VCC輸出的低阻通路。反之。下端的開關(S2)閉合其常開觸點(未顯示),因為其控制輸入(引腳⑤)為高。引腳⑦到引腳⑥導通使電池的負端與系統地連接。
U1內部的ESD二極管可保證電路開啟,其作用類似于全波整流。電池電壓高于1V時,模擬開關內部的MOSFET即可導通。極快的工作速度(導通時間低于20ns)能夠在電池極性接反時迅速切換電池與系統的連接極性,保證電路正常工作。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
發布評論請先 登錄
相關推薦
MAX44290ANT+T和MAX44290ANT+TG7有什么區別呢?
MAX44290ANT+T和MAX44290ANT+TG7請問有什么區別呢?
是否有文件呢 謝謝
發表于 12-19 07:17
MAX232實現單電源供電下放大3.3Vpp方波?
請問大佬,可以通過MAX232實現單電源5V供電下,把40KHZ,3.3Vpp的方波放大到多少?怎么實現呢?(老師提示是用H橋和MAX轉換電路)
發表于 11-04 20:08
電源反接制動和倒拉反接制動有何異同點
? ? ??電源反接制動是一種電機制動技術,它通過改變電機電源的相序來實現快速停止。在這種制動方式中,當電機需要停止時,控制裝置會改變電源相序,使得電機的轉子與定子磁場產生反向力矩,從而迅速減速并停止
電源反接制動和倒拉反接制動有何異同點
制動技術,它通過改變電機電源的相序來實現快速停止。在這種制動方式中,當電機需要停止時,控制裝置會改變電源相序,使得電機的轉子與定子磁場產生反向力矩,從而迅速減速并停止。 電源反接制動的特點: 快速制動 :由于電機轉子
ZN-Z84,能ping通,但是NI MAX不識別,找不到設備
前提是,安裝原廠的user程序,利用usb驅動和接口,是可以實現程控通信的。
ZN-Z84,開關單元,利用網線連接,結果IP 都用cmd的ping 命令ping通了,死活都無法在NI MAX 和IO
發表于 08-02 09:08
ZN-Z84,能ping通,但是NI MAX不識別,找不到設備
前提是,安裝原廠的user程序,利用usb驅動和接口,是可以實現程控通信的。
ZN-Z84,開關單元,利用網線連接,結果IP 都用cmd的ping 命令ping通了,死活都無法在NI MAX 和IO
發表于 07-27 10:18
max11284的REF基準輸入是基于AVSS嗎?
max11284 的REF基準輸入是基于AVSS嗎?我看EVKIT中當J2_A,J23_A的2、3腳跳選時,此時AVDD-AVSS輸入為+-1.8V。此時采用板上基準芯片MAX
發表于 07-23 06:55
MAX13085EESA+與MAX13485EESA+的差異在什么地方?
MAX13085EESA+與MAX13485EESA+,這兩款同系列的8SO芯片的差異在什么地方,是否可以互相替代
發表于 05-23 08:10
MAX17205電量計如何正確配置所有寄存器?
第一個問題:MAX17205 用EZ配置電池相關參數,但我發現Empty Voltage最低只能設置為3V,我想設置成2.5V或2.4V有辦法實現嗎?
第二個問題:我看MAX1720
發表于 05-22 08:17
使用PSoC4 MAX的最大感應距離是多少?
功能。 通過使用 Pioneer 套件,我在擴展板上的觸摸板上覆蓋了約 4 毫米的玻璃蓋板,仍然能獲得良好的響應,但還沒有進行進一步的試驗。 有人探索過使用 PSoC4 MAX 感知距離的極限嗎?有人達到過 10 毫米嗎? 顯然,這將取決于傳感器的設計/構造。
發表于 05-21 06:44
PSoC 4100S Max是否能保證IMO精確度規格低于±2.5%?
溫度范圍在 -40deg 至 +105deg 的設備的 IMO 精度為 ±2.5%(紅色框)。
設備為 PSoC 4100S Max。
如果從 0 度到 +85 度使用該設備,IMO 的精度是否能
發表于 05-20 06:24
max6675測溫不準的原因?如何解決?
define MAX6675_CS_Pin GPIO_PIN_12
define MAX6675_CS_GPIO_Port GPIOB
SPI_HandleTypeDef hspi2
發表于 03-18 07:51
PSoC4s MAX如何讓距離傳感器進入堅固的地面?
我們正在考慮在連接到 FG 的金屬框架上實現 PSoC4s MAX 接近傳感器。
圖像示意圖如下:
當我們驗證操作時,PSoC4s MAX的距離傳感器的靈敏度非常差,因為金屬框架變成了堅固
發表于 01-29 07:01





 工商網監
工商網監
評論