 自行車里程速度表的工作原理及設計
自行車里程速度表的工作原理及設計
現在,很多人都把騎自行車作為一項鍛煉身體的運動項目,如果在自行車上加裝一個里程速度表,就可以知道自己騎車的速度和行程,從而很好地控制運動量。本文介紹一種用單片機制作的自行車里程速度表。里程和速度顯示可進行切換,采用三位數碼管顯示,最大可顯示里程為99.9km。顯示最高速度可為99.9km/h。該里程速度表也可以用在電動自行車和速度不超過100km/h的摩托車上。
一、電路原理
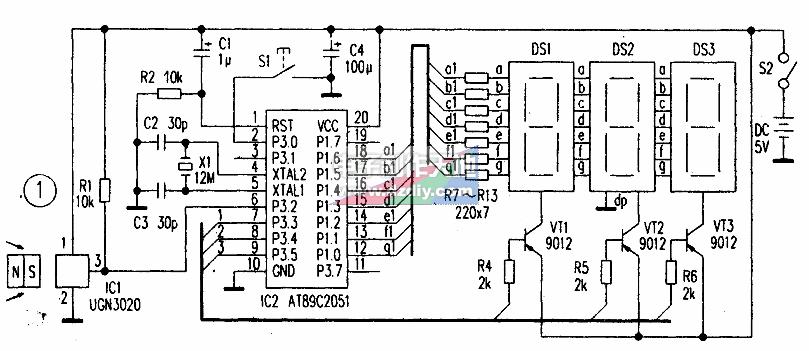
電路如圖1所示。由檢測傳感器、單片機電路和數碼顯示電路等組成。
檢測傳感器由永久磁鐵和開關型霍爾集成電路UGN3020.組成。
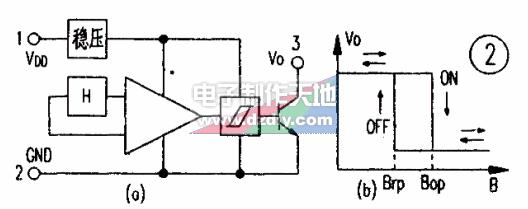
UGN3020由霍爾元件、放大器、整形電路及集電極開路輸出電路等組成。
其功能是把磁信號轉換成電信號。圖2a是其內部框圖。霍爾元件H為磁敏元件,當垂直于霍爾元件的磁場強度隨之變化時,其兩端的電壓就會發生變化,經放大和整形后,即可在③腳輸出脈沖電信號。其工作特性如圖2b所示。由于有一定的磁滯效應。可保證開關無抖動。Bop為工作點“開”的磁場強度,Brp為釋放點“關”的磁場強度。永久磁鐵固定在車輪的輻條上,UGN3020固定在車輪的叉架上。
檢測傳感器的工作原理如下:車輪每轉一周,磁鐵經過UGN3020一次,其③腳就輸出一個脈沖信號。UGN3020輸出的脈沖信號作為單片機AT89C2051的外中斷信號。從P3.2口輸入。單片機測量脈沖信號的個數和脈沖周期。根據脈沖信號的個數計算出里程,根據脈沖信號的周期計算出速度并送數碼管顯示。Sl用來進行里程和速度顯示的切換,在初始狀態下顯示的是速度。數碼管DS1~DS3、VT1~VT3、R4~R13等組成顯示電路。使用共陽數碼管。P3.3~P3.5為數碼管的動態掃描位驅動。P1.0~P1.6作數碼段碼輸出。
二、程序設計
程序用C語言編寫,由主程序、外中斷O服務程序、11D中斷服務程序、延時子程序等模塊組成。主程序主要完成程序初始化和鍵盤處理。
外部中斷0服務程序由測量、計算、讀數等部分組成,TO中斷服務程序由計時、動態掃描顯示、自行車停車判斷等部分組成。
從P3.2口輸入的脈沖信號作為外中斷O的中斷請求信號。采用沿觸發方式。在測量速度時,由于車輪轉動脈沖信號的頻率很低,不適宜使用計數的方式進行測量,所以采用測脈沖周期的方法進行測量。用脈沖信號系統來控制計時信號,通過計時數計算出脈沖周期,用車輪的周長除以周期便可得到自行車的行駛速度。在測量里程時,用脈沖信號個數乘以車輪的周長便可獲得行駛里程。需要說明的是:脈沖信號周期和個數是同時測量的。要做的只是用按鈕開關Sl切換顯示。
本文的程序是針對車輪直徑為26英寸的自行車編寫的。
對于其他規格的自行車。
只要改寫程序spm=14904(常量1),n和sPIN=207(常量2)×c即可。為了避免使用浮點數。運算結果長度是以百米為單位的,數據讀出時,在第三位數加小數點就換算成千米了。為方便讀者制作,現列出各種規格的輪徑和輪周長、程序常量的對應值見附表,供參考。
-
單片機
+關注
關注
6035文章
44554瀏覽量
634682 -
里程表
+關注
關注
1文章
15瀏覽量
9864
發布評論請先 登錄
相關推薦

用單片機制作的自行車里程速度表
基于單片機與光電傳感器的電動自行車速度/里程表設計
STM32的自行車里程速度儀表
基于單片機的自行車里程監測系統的設計
由51單片機設計的霍爾自行車碼表測速系統電路方案
電動自行車速度與里程表的設計方案
自行車里程速度表的電路原理及程序設計
如何設計自行車里程速度計論文免費下載
使用51單片機和霍爾傳感器設計自行車里程超速報警器的源代碼







 工商網監
工商網監
評論