 基于FPGA的異步FIFO設計架構
基于FPGA的異步FIFO設計架構
今天要介紹的異步FIFO,可以有不同的讀寫時鐘,即不同的時鐘域。由于異步FIFO沒有外部地址端口,因此內部采用讀寫指針并順序讀寫,即先寫進FIFO的數據先讀取(簡稱先進先出)。這里的讀寫指針是異步的,處理不同的時鐘域,而異步FIFO的空滿標志位是根據讀寫指針的情況得到的。
為了得到正確的空滿標志位,需要對讀寫指針進行同步。一般情況下,如果一個時鐘域的信號直接給另一個時鐘域采集,可能會產生亞穩態,亞穩態的產生對設計而言是致命的。為了減少不同時鐘域間的亞穩態問題,我們先對它進行兩拍寄存同步,如圖1所示。
當然,對異步信號的寄存越多,產生亞穩態的概率就越小,但延時越多。不過一般情況下,寄存兩拍就夠了。為了繼續減少亞穩態產生的概率,在對異步信號同步之前,將其轉換為格雷碼,使其每個狀態只有一個位在變化。例如,假設N位二進制變量產生的亞穩態概率為a,那么二進制轉換成格雷碼后其產生的亞穩態概率則為a/N。
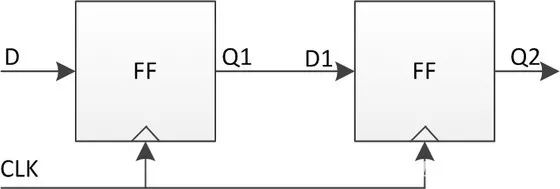
圖1 對異步信號用兩級寄存器同步
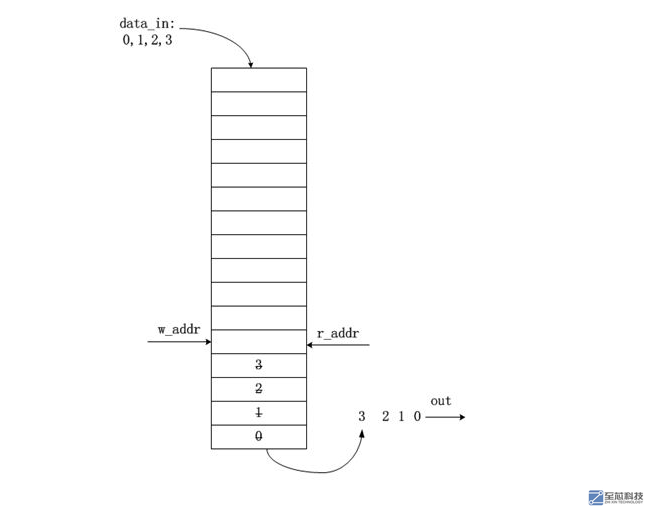
根據上述原理,設計了異步FIFO的架構,如圖2所示。
圖2 異步FIFO設計架構
根據異步FIFO的設計架構,歸納以下設計步驟:
寫時鐘域:
(1)根據寫使能wr_en和寫滿標志位wr_full產生二進制寫指針
(2)根據二進制寫指針產生雙端口RAM的寫地址
(3)由二進制寫指針轉換成格雷碼寫指針
(4)對格雷碼讀指針在寫時鐘域中進行兩級同步得同步后格雷碼讀指針
(5)同步后格雷碼讀指針轉化成同步后二進制讀指針
(6)步驟(3)與步驟(4)比較得寫滿標志位wr_full
(7)步驟(1)與步驟(5)相減得指示寫FIFO的數據量
讀時鐘域:
(8)根據讀使能rd_en和讀空標志位rd_empty產生二進制讀指針
(9)根據二進制讀指針產生雙端口RAM的讀地址
(10)由二進制讀指針轉換成格雷碼讀指針
(11)對格雷碼寫指針在讀時鐘域中進行兩級同步得同步后格雷碼寫指針
(12)同步后格雷碼寫指針轉化成同步后二進制寫指針
(13)步驟(10)與步驟(11)比較得讀空標志位rd_empty
(14)步驟(8)與步驟(12)相減得指示讀FIFO的數據量
Verilog HDL設計電路,如下所示:
**------------------------------文件信息--------------------------------
** 文件名: asyn_fifo.v
** 創建者: CrazyBird
** 創建日期: 2016-1-16
** 版本號: v1.0
** 功能描述: 異步FIFO,用于處理不同的時鐘域
**
***********************************************************************/
// synopsys translate_off
`timescale 1 ns / 1 ps
// synopsys translate_on
module asyn_fifo(
wr_rst_n,
wr_clk,
wr_en,
wr_data,
wr_full,
wr_cnt,
rd_rst_n,
rd_clk,
rd_en,
rd_data,
rd_empty,
rd_cnt
);
//******************************************************************
// 參數定義
//******************************************************************
parameter C_DATA_WIDTH = 8;
parameter C_FIFO_DEPTH_WIDTH = 4;
//******************************************************************
// 端口定義
//******************************************************************
input wr_rst_n;
input wr_clk;
input wr_en;
input [C_DATA_WIDTH-1:0] wr_data;
output reg wr_full;
output reg [C_FIFO_DEPTH_WIDTH:0] wr_cnt;
input rd_rst_n;
input rd_clk;
input rd_en;
output [C_DATA_WIDTH-1:0] rd_data;
output reg rd_empty;
output reg [C_FIFO_DEPTH_WIDTH:0] rd_cnt;
//******************************************************************
// 內部變量定義
//******************************************************************
reg [C_DATA_WIDTH-1:0] mem [0:(1 《《 C_FIFO_DEPTH_WIDTH)-1];
wire [C_FIFO_DEPTH_WIDTH-1:0] wr_addr;
wire [C_FIFO_DEPTH_WIDTH-1:0] rd_addr;
wire [C_FIFO_DEPTH_WIDTH:0] next_wr_bin_ptr;
wire [C_FIFO_DEPTH_WIDTH:0] next_rd_bin_ptr;
reg [C_FIFO_DEPTH_WIDTH:0] wr_bin_ptr;
reg [C_FIFO_DEPTH_WIDTH:0] rd_bin_ptr;
wire [C_FIFO_DEPTH_WIDTH:0] next_wr_gray_ptr;
wire [C_FIFO_DEPTH_WIDTH:0] next_rd_gray_ptr;
wire [C_FIFO_DEPTH_WIDTH:0] syn_wr_bin_ptr_rd_clk;
wire [C_FIFO_DEPTH_WIDTH:0] syn_rd_bin_ptr_wr_clk;
wire [C_FIFO_DEPTH_WIDTH:0] syn_wr_gray_ptr_rd_clk;
wire [C_FIFO_DEPTH_WIDTH:0] syn_rd_gray_ptr_wr_clk;
wire [C_FIFO_DEPTH_WIDTH:0] wr_cnt_w;
wire [C_FIFO_DEPTH_WIDTH:0] rd_cnt_w;
wire wr_full_w;
wire rd_empty_w;
//******************************************************************
// 雙端口RAM的讀寫
//******************************************************************
// 寫RAM
always @(posedge wr_clk)
begin
if((wr_en & ~wr_full) == 1‘b1)
mem[wr_addr] 《= wr_data;
end
// 讀RAM
assign rd_data = mem[rd_addr];
//******************************************************************
// 二進制寫指針的產生
//******************************************************************
assign next_wr_bin_ptr = wr_bin_ptr + (wr_en & ~wr_full);
always @(posedge wr_clk or negedge wr_rst_n)
begin
if(wr_rst_n == 1’b0)
wr_bin_ptr 《= {(C_FIFO_DEPTH_WIDTH+1){1‘b0}};
else
wr_bin_ptr 《= next_wr_bin_ptr;
end
//******************************************************************
// RAM寫地址的產生
//******************************************************************
assign wr_addr = wr_bin_ptr[C_FIFO_DEPTH_WIDTH-1:0];
//******************************************************************
// 二進制寫指針轉換成格雷碼寫指針
//******************************************************************
bin2gray #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_bin2gray_wr (
.bin ( next_wr_bin_ptr ),
.gray ( next_wr_gray_ptr )
);
//******************************************************************
// 對格雷碼讀指針在寫時鐘域中進行兩級同步
//******************************************************************
double_syn_ff #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_double_syn_ff_wr (
.rst_n ( wr_rst_n ),
.clk ( wr_clk ),
.din ( next_rd_gray_ptr ),
.dout ( syn_rd_gray_ptr_wr_clk )
);
//******************************************************************
// 同步后的格雷碼讀指針轉換成同步后的二進制讀指針
//******************************************************************
gray2bin #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_gray2bin_wr (
.gray ( syn_rd_gray_ptr_wr_clk ),
.bin ( syn_rd_bin_ptr_wr_clk )
);
//******************************************************************
// FIFO寫滿標志位的產生和寫FIFO數據量的計數
//******************************************************************
assign wr_full_w = (next_wr_gray_ptr == ({~syn_rd_gray_ptr_wr_clk[C_FIFO_DEPTH_WIDTH:C_FIFO_DEPTH_WIDTH-1],
syn_rd_gray_ptr_wr_clk[C_FIFO_DEPTH_WIDTH-2:0]}));
assign wr_cnt_w = next_wr_bin_ptr - syn_rd_bin_ptr_wr_clk;
always @(posedge wr_clk or negedge wr_rst_n)
begin
if(wr_rst_n == 1’b0)
begin
wr_full 《= 1‘b0;
wr_cnt 《= {(C_FIFO_DEPTH_WIDTH+1){1’b0}};
end
else
begin
wr_full 《= wr_full_w;
wr_cnt 《= wr_cnt_w;
end
end
//******************************************************************
// 二進制讀指針的產生
//******************************************************************
assign next_rd_bin_ptr = rd_bin_ptr + (rd_en & ~rd_empty);
always @(posedge rd_clk or negedge rd_rst_n)
begin
if(rd_rst_n == 1‘b0)
rd_bin_ptr 《= {(C_FIFO_DEPTH_WIDTH+1){1’b0}};
else
rd_bin_ptr 《= next_rd_bin_ptr;
end
//******************************************************************
// RAM讀地址的產生
//******************************************************************
assign rd_addr = rd_bin_ptr[C_FIFO_DEPTH_WIDTH-1:0];
//******************************************************************
// 二進制讀指針轉換成格雷碼讀指針
//******************************************************************
bin2gray #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_bin2gray_rd (
.bin ( next_rd_bin_ptr ),
.gray ( next_rd_gray_ptr )
);
//******************************************************************
// 對格雷碼寫指針在讀時鐘域中進行兩級同步
//******************************************************************
double_syn_ff #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_double_syn_ff_rd (
.rst_n ( rd_rst_n ),
.clk ( rd_clk ),
.din ( next_wr_gray_ptr ),
.dout ( syn_wr_gray_ptr_rd_clk )
);
//******************************************************************
// 同步后的格雷碼寫指針轉換成同步后的二進制寫指針
//******************************************************************
gray2bin #(
.C_DATA_WIDTH(C_FIFO_DEPTH_WIDTH+1)
)
u_gray2bin_rd (
.gray ( syn_wr_gray_ptr_rd_clk ),
.bin ( syn_wr_bin_ptr_rd_clk )
);
//******************************************************************
// FIFO讀空標志位的產生和讀FIFO數據量的計數
//******************************************************************
assign rd_empty_w = (next_rd_gray_ptr == syn_wr_gray_ptr_rd_clk);
assign rd_cnt_w = syn_wr_bin_ptr_rd_clk - next_rd_bin_ptr;
always @(posedge rd_clk or negedge rd_rst_n)
begin
if(rd_rst_n == 1‘b0)
begin
rd_empty 《= 1’b0;
rd_cnt 《= {(C_FIFO_DEPTH_WIDTH+1){1‘b0}};
end
else
begin
rd_empty 《= rd_empty_w;
rd_cnt 《= rd_cnt_w;
end
end
endmodule
其中,模塊gray2bin是格雷碼轉二進制碼,模塊bin2gray是二進制碼轉格雷碼,詳情見上一篇博客,地址:http://blog.chinaaet.com/crazybird/p/5100000866 。模塊double_syn_ff是兩級寄存器,用于同步信號,對應的Verilog HDL實現如下所示:
**------------------------------文件信息--------------------------------
** 文件名: double_syn_ff.v
** 創建者: CrazyBird
** 創建日期: 2016-1-16
** 版本號: v1.0
** 功能描述: 對輸入信號進行兩級同步后輸出
**
***********************************************************************/
// synopsys translate_off
`timescale 1 ns / 1 ps
// synopsys translate_on
module double_syn_ff(
rst_n,
clk,
din,
dout
);
//******************************************************************
// 參數定義
//******************************************************************
parameter C_DATA_WIDTH = 8;
//******************************************************************
// 端口定義
//******************************************************************
input rst_n;
input clk;
input [C_DATA_WIDTH-1:0] din;
output reg [C_DATA_WIDTH-1:0] dout;
//******************************************************************
// 內部變量定義
//******************************************************************
reg [C_DATA_WIDTH-1:0] data_r;
//******************************************************************
// 對輸入信號進行兩級同步后輸出
//******************************************************************
always @(posedge clk or negedge rst_n)
begin
if(rst_n == 1’b0)
{dout,data_r} 《= {(2*C_DATA_WIDTH){1‘b0}};
else
{dout,data_r} 《= {data_r,din};
end
endmodule
由于字數的限制,異步FIFO的功能驗證放在下一篇博文中吧!!!
-
寄存器
+關注
關注
31文章
5336瀏覽量
120235 -
fifo
+關注
關注
3文章
387瀏覽量
43651
原文標題:【原創博文】基于FPGA的異步FIFO設計
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于FPGA的異步FIFO的實現
基于FPGA器件實現異步FIFO讀寫系統的設計
異步FIFO結構及FPGA設計
高速異步FIFO的設計與實現
Camera Link接口的異步FIFO設計與實現
異步FIFO結構及FPGA設計


異步FIFO在FPGA與DSP通信中的應用解析

基于FPGA的異步FIFO設計方法詳解
Xilinx異步FIFO的大坑






 工商網監
工商網監
評論