") 深入淺出地介紹了牛頓法、動(dòng)量法、RMSProp、Adam優(yōu)化算法
深入淺出地介紹了牛頓法、動(dòng)量法、RMSProp、Adam優(yōu)化算法
編者按:DRDO研究人員Ayoosh Kathuria深入淺出地介紹了牛頓法、動(dòng)量法、RMSProp、Adam優(yōu)化算法。
本系列的上一篇文章介紹了隨機(jī)梯度下降,以及如何應(yīng)對(duì)陷入局部極小值或鞍點(diǎn)的問(wèn)題。在這篇文章中,我們將查看另一個(gè)困擾神經(jīng)網(wǎng)絡(luò)訓(xùn)練的問(wèn)題,病態(tài)曲率。
局部極小值和鞍點(diǎn)會(huì)使訓(xùn)練停滯,而病態(tài)曲率則會(huì)減慢訓(xùn)練速度,以至于機(jī)器學(xué)習(xí)從業(yè)者可能會(huì)覺(jué)得搜索收斂到了一個(gè)次優(yōu)極小值。讓我們深入了解下什么是病態(tài)曲率。
病態(tài)曲率
考慮下面的損失曲面。
如你所見(jiàn),我們從隨機(jī)點(diǎn)開(kāi)始,漸漸進(jìn)入藍(lán)色的溝壑區(qū)。(顏色表示損失函數(shù)在特定點(diǎn)的值是高是低,紅色表示高值,藍(lán)色表示低值。)
在到達(dá)最小值之前,我們需要首先穿過(guò)溝壑區(qū),也就是病態(tài)曲率。讓我們放大一下這一區(qū)域,看看為什么稱(chēng)病態(tài)?
紅線為梯度下降的路徑;藍(lán)線為理想路徑
如上圖所示,梯度下降在溝壑區(qū)的脊間反復(fù)振蕩,極其緩慢地向最小值處移動(dòng)。這是因?yàn)閣1方向要陡峭得多。
考慮下圖中A點(diǎn)的梯度,可以分解為w1、w2方向的兩個(gè)分量。w1方向的梯度要大很多,因此梯度的方向大為偏向w1,而不是w2(但w2才是能夠更快到達(dá)最小值處的梯度方向)。
通常情況下,我們使用低學(xué)習(xí)率來(lái)應(yīng)對(duì)這樣的反復(fù)振蕩,但在病態(tài)曲率區(qū)域使用低學(xué)習(xí)率,可能要花很多時(shí)間才能達(dá)到最小值處。事實(shí)上,有論文報(bào)告,防止反復(fù)振蕩的足夠小的學(xué)習(xí)率,也許會(huì)導(dǎo)致從業(yè)者相信損失完全沒(méi)有改善,干脆放棄訓(xùn)練。
大概,我們需要找到一種方法,首先緩慢地進(jìn)入病態(tài)曲率的平坦底部,然后加速往最小值方向移動(dòng)。二階導(dǎo)數(shù)可以幫助我們做到這一點(diǎn)。
牛頓法
梯度下降是一階優(yōu)化方法。它只考慮損失函數(shù)的一階導(dǎo)數(shù),不考慮高階函數(shù)。基本上這意味著它對(duì)損失函數(shù)的曲率一無(wú)所知。梯度下降可以告訴我們損失是否下降,下降得有多快,但無(wú)法區(qū)分曲線的的彎曲程度。
上圖三條曲線,紅點(diǎn)處的梯度都是一樣的,但曲率大不一樣。解決方案?考慮二階導(dǎo)數(shù),或者說(shuō)梯度改變得有多快。
使用二階導(dǎo)數(shù)解決這一問(wèn)題的一個(gè)非常流行的技術(shù)是牛頓法(Newton's Method)。為了避免偏離本文的主題,我不會(huì)過(guò)多探究牛頓法的數(shù)學(xué)。相反,我將嘗試構(gòu)建牛頓法的直覺(jué)。
牛頓法可以提供向梯度方向移動(dòng)的理想步幅。由于我們現(xiàn)在具備了損失曲面的曲率信息,步幅可以據(jù)此確定,避免越過(guò)病態(tài)曲率的底部。
牛頓法通過(guò)計(jì)算Hessian矩陣做到這一點(diǎn)。Hessian矩陣是損失函數(shù)在所有權(quán)重組合上的二階導(dǎo)數(shù)的矩陣。

Hessian提供了損失曲面每一點(diǎn)上的曲率估計(jì)。正曲率意味著隨著我們的移動(dòng),損失曲面變得不那么陡峭了。負(fù)曲率則意味著,損失曲面變得越來(lái)越陡峭了。
注意,如果這一步的計(jì)算結(jié)果是負(fù)的,那就意味著我們可以切換回原本的算法。這對(duì)應(yīng)于下面梯度變得越來(lái)越陡峭的情形。

然而,如果梯度變得越來(lái)越不陡峭,那么我們也許正向病態(tài)曲率的底部移動(dòng)。這時(shí)牛頓算法提供了一個(gè)修正過(guò)的學(xué)習(xí)步幅,和曲率成反比。換句話說(shuō),如果損失曲面變得不那么陡峭,學(xué)習(xí)步幅就下降。
為何我們不常使用牛頓法?
你已經(jīng)看到公式中的Hessian矩陣了。Hessian矩陣需要我們計(jì)算損失函數(shù)在所有權(quán)重組合上的梯度。也就是說(shuō),需要做的計(jì)算的數(shù)量級(jí)是神經(jīng)網(wǎng)絡(luò)所有權(quán)重?cái)?shù)量的平方。
現(xiàn)代神經(jīng)網(wǎng)絡(luò)架構(gòu)的參數(shù)量可能是數(shù)億,計(jì)算數(shù)億的平方的梯度在算力上不可行。
雖然高階優(yōu)化方法在算力上不太可行,但二階優(yōu)化關(guān)于納入梯度自身如何改變的想法是可以借鑒的。雖然我們無(wú)法準(zhǔn)確計(jì)算這一信息,但我們可以基于之前梯度的信息使用啟發(fā)式算法引導(dǎo)優(yōu)化過(guò)程。
動(dòng)量
搭配SGD使用的一個(gè)非常流行的技術(shù)是動(dòng)量(Momentum)。動(dòng)量法不僅使用當(dāng)前的梯度,同時(shí)還利用之前的梯度提供的信息。

上面的第一個(gè)等式就是動(dòng)量,動(dòng)量等式由兩部分組成,第一項(xiàng)是上一次迭代的動(dòng)量,乘以“動(dòng)量系數(shù)”。
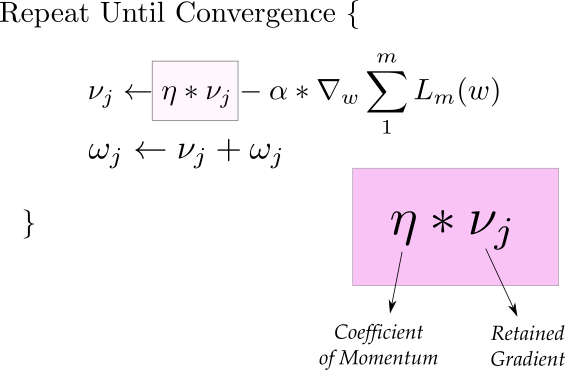
比如,假設(shè)我們將初始動(dòng)量v設(shè)為0,系數(shù)定為0.9,那么后續(xù)的更新等式為:

我們看到,后續(xù)的更新保留了之前的梯度,但最近的梯度權(quán)重更高。(致喜歡數(shù)學(xué)的讀者,這是梯度的指數(shù)平均。)
下面我們來(lái)看看動(dòng)量法如何幫助我們緩解病態(tài)曲率的問(wèn)題。下圖中,大多數(shù)梯度更新發(fā)生在之字形方向上,我們將每次更新分解為w1和w2方向上的兩個(gè)分量。如果我們分別累加這些梯度的兩個(gè)分量,那么w1方向上的分量將互相抵消,而w2方向上的分量得到了加強(qiáng)。
也就是說(shuō),基于動(dòng)量法的更新,積累了w2方向上的分量,清空了w1方向上的分量,從而幫助我們更快地通往最小值。從這個(gè)意義上說(shuō),動(dòng)量法也有助于抑制振蕩。
動(dòng)量法同時(shí)提供了加速度,從而加快收斂。但你可能想要搭配模擬退火,以免跳過(guò)最小值。
在實(shí)踐中,動(dòng)量系數(shù)一般初始化為0.5,并在多個(gè)epoch后逐漸退火至0.9.
RMSProp
RMSProp,也就是均方根傳播的歷史很有趣。它是傳奇人物Geoffrey Hinton在Coursera授課時(shí)初次提出的。
RMSProp也試圖抑制振蕩,但采取的方法和動(dòng)量不同。此外,RMSProp可以自動(dòng)調(diào)整學(xué)習(xí)率。還有,RMSProp為每個(gè)參數(shù)選定不同的學(xué)習(xí)率。

在第一個(gè)等式中,類(lèi)似之前的動(dòng)量法,我們計(jì)算了梯度平方的指數(shù)平均。由于我們?yōu)槊總€(gè)參數(shù)單獨(dú)計(jì)算,這里的梯度gt表示正更新的參數(shù)上的梯度投影。
第二個(gè)等式根據(jù)指數(shù)平均決定步幅大小。我們選定一個(gè)初始學(xué)習(xí)率η,接著除以平均數(shù)。在我們上面舉的例子中,w1的梯度指數(shù)平均比w2大得多,所以w1的學(xué)習(xí)步幅比w2小得多。這就幫助我們避免了脊間振蕩,更快地向最小值移動(dòng)。
第三個(gè)等式不過(guò)是權(quán)重更新步驟。
上面的等式中,超參數(shù)ρ一般定為0.9,但你可能需要加以調(diào)整。等式2中的ε是為了確保除數(shù)不為零,一般定為1e-10.
注意RMSProp隱式地應(yīng)用了模擬退火。在向最小值移動(dòng)的過(guò)程中,RMSProp會(huì)自動(dòng)降低學(xué)習(xí)步幅,以免跳過(guò)最小值。
Adam
Adam,即Adaptive Moment Optimization算法結(jié)合了動(dòng)量和RMSProp的啟發(fā)式算法。

這里,我們計(jì)算了梯度的指數(shù)平均和梯度平方的指數(shù)平均(等式1和等式2)。為了得出學(xué)習(xí)步幅,等式3在學(xué)習(xí)率上乘以梯度的平均(類(lèi)似動(dòng)量),除以梯度平方平均的均方根(類(lèi)似RMSProp)。等式4是權(quán)重更新步驟。
超參數(shù)β1一般取0.9,β2一般取0.99. ε一般定為1e-10.
結(jié)語(yǔ)
本文介紹了三種應(yīng)對(duì)病態(tài)曲率同時(shí)加速訓(xùn)練過(guò)程的梯度下降方法。
在這三種方法之中,也許動(dòng)量法用得更普遍,盡管從論文上看Adam更吸引人。經(jīng)驗(yàn)表明這三種算法都能收斂到給定損失曲面的不同的最優(yōu)局部極小值。然而,動(dòng)量法看起來(lái)要比Adam更容易找到比較平坦的最小值,而自適應(yīng)方法(自動(dòng)調(diào)整學(xué)習(xí)率)傾向于迅速地收斂于較尖的最小值。比較平坦的最小值概括性更好。
盡管這些方法有助于我們馴服深度網(wǎng)絡(luò)難以控制的損失平面,隨著網(wǎng)絡(luò)日益變深,它們開(kāi)始變得不夠用了。除了選擇更好的優(yōu)化方法,有相當(dāng)多的研究試圖尋找能夠生成更平滑的損失曲面的架構(gòu)。批量歸一化(Batch Normalization)和殘差連接(Residual Connections)正是這方面的兩個(gè)例子。我們會(huì)在后續(xù)的文章中詳細(xì)介紹它們。但這篇文章就到此為止了
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4771瀏覽量
100722 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4329瀏覽量
62576
原文標(biāo)題:深度學(xué)習(xí)優(yōu)化算法入門(mén):二、動(dòng)量、RMSProp、Adam
文章出處:【微信號(hào):jqr_AI,微信公眾號(hào):論智】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
淺聊深入淺出RISC-V調(diào)試
節(jié)點(diǎn)電壓法和回路電流法的選取原則
回路電流法和節(jié)點(diǎn)電壓法適用范圍
回路電流法和支路電流法的實(shí)質(zhì)是什么
深入淺出系列之代碼可讀性
開(kāi)路電壓法和短路電流法的優(yōu)缺點(diǎn)
節(jié)點(diǎn)電壓法的實(shí)質(zhì)是什么
深入淺出理解三極管
節(jié)點(diǎn)電壓法怎么列方程 節(jié)點(diǎn)電壓法流入為正還是負(fù)
【年度精選】2023年度top5榜單——電機(jī)控制資料
深入淺出Yolov3和Yolov4

深入淺出理解PagedAttention CUDA實(shí)現(xiàn)

簡(jiǎn)析控制系統(tǒng)的穩(wěn)定性判據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論