


一、UART是什么
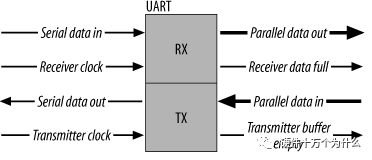
UART是通用異步收發(fā)傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART,是一種異步收發(fā)傳輸器,是設(shè)備間進(jìn)行異步通信的關(guān)鍵模塊。UART負(fù)責(zé)處理數(shù)據(jù)總線和串行口之間的串/并、并/串轉(zhuǎn)換,并規(guī)定了幀格式;通信雙方只要采用相同的幀格式和波特率,就能在未共享時鐘信號的情況下,僅用兩根信號線(Rx 和Tx)就可以完成通信過程,因此也稱為異步串行通信。
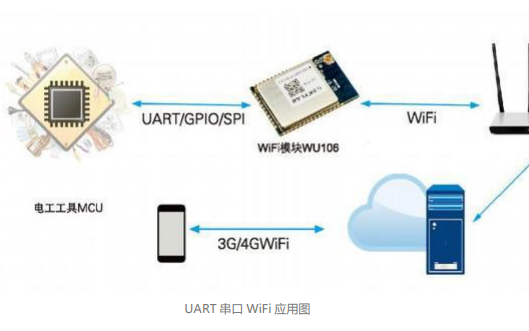
若加入一個合適的電平轉(zhuǎn)換器,如SP3232E、SP3485,UART 還能用于RS-232、RS-485 通信,或與計算機的端口連接。UART 應(yīng)用非常廣泛,手機、工業(yè)控制、PC 等應(yīng)用中都要用到UART。
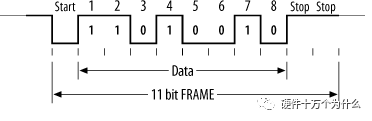
UART使用的是 異步,串行通信。 串行通信是指利用一條傳輸線將資料一位位地順序傳送。特點是通信線路簡單,利用簡單的線纜就可實現(xiàn)通信,降低成本,適用于遠(yuǎn)距離通信,但傳輸速度慢的應(yīng)用場合。 異步通信以一個字符為傳輸單位,通信中兩個字符間的時間間隔多少是不固定的,然而在同一個字符中的兩個相鄰位間的時間間隔是固定的。 數(shù)據(jù)傳送速率用波特率來表示,即每秒鐘傳送的二進(jìn)制位數(shù)。例如數(shù)據(jù)傳送速率為120字符/秒,而每一個字符為10位(1個起始位,7個數(shù)據(jù)位,1個校驗位,1個結(jié)束位),則其傳送的波特率為10×120=1200字符/秒=1200波特。 數(shù)據(jù)通信格式如下圖:
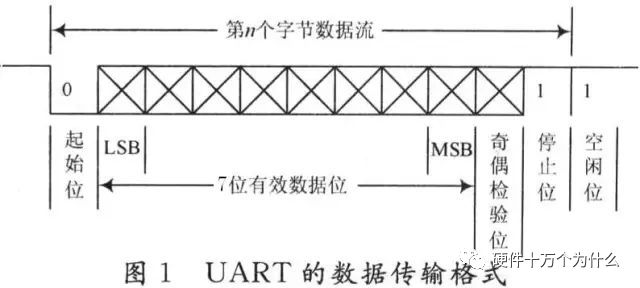
其中各位的意義如下:起始位:先發(fā)出一個邏輯”0”信號,表示傳輸字符的開始。數(shù)據(jù)位:可以是5~8位邏輯”0”或”1”。如ASCII碼(7位),擴展BCD碼(8位)。小端傳輸校驗位:數(shù)據(jù)位加上這一位后,使得“1”的位數(shù)應(yīng)為偶數(shù)(偶校驗)或奇數(shù)(奇校驗)停止位:它是一個字符數(shù)據(jù)的結(jié)束標(biāo)志。可以是1位、1.5位、2位的高電平。空閑位:處于邏輯“1”狀態(tài),表示當(dāng)前線路上沒有資料傳送。 注:異步通信是按字符傳輸?shù)模邮赵O(shè)備在收到起始信號之后只要在一個字符的傳輸時間內(nèi)能和發(fā)送設(shè)備保持同步就能正確接收。下一個字符起始位的到來又使同步重新校準(zhǔn)(依靠檢測起始位來實現(xiàn)發(fā)送與接收方的時鐘自同步的)
總結(jié)起來,如果我們要配置串口通信,至少要設(shè)置一下幾個參數(shù):字長(即一次傳輸數(shù)據(jù)的長度)、波特率(即每秒傳輸?shù)臄?shù)據(jù)位數(shù))、奇偶校驗位及停止位。
二、串口工作過程分析
USART是通用同步/異步收發(fā)器
UART是通用異步收發(fā)器
由于常用的是異步模式,所以在此我們都是只需要使用UART。
我們先介紹串口發(fā)送的過程,我們先來看一下串口架構(gòu)圖:
可以看出,串口外設(shè)的架構(gòu)圖乍一看略微復(fù)雜,這里我們分開進(jìn)行分析:
我們直接從發(fā)送(TX)和接收(RX)開始講起。
RX和TX此處不做過多介紹。
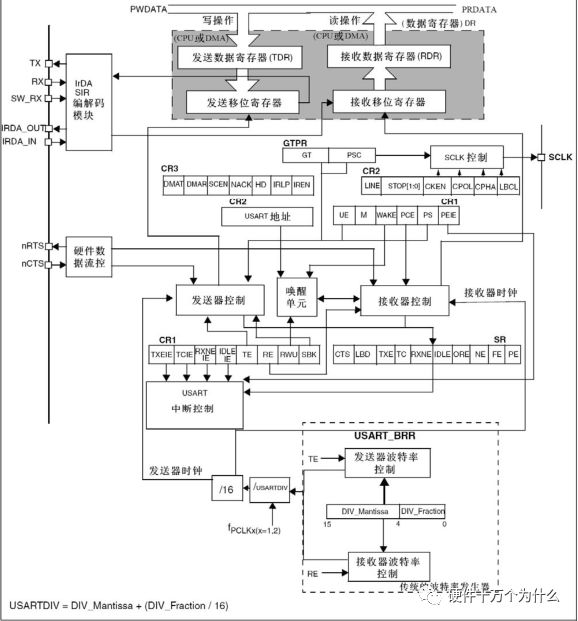
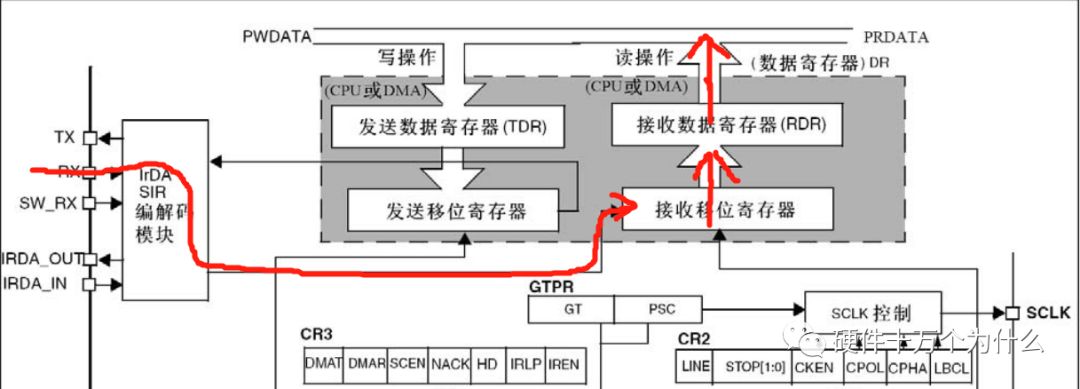
根據(jù)下圖紅色箭頭標(biāo)記可以看出:對于接收來說,它經(jīng)過編解碼模塊,然后直接進(jìn)入到了接收移位寄存器,接收移位寄存器一位一位的接收數(shù)據(jù),然后再將接收到的數(shù)據(jù)一次性寫到接收數(shù)據(jù)寄存器(RDR)中,這樣,CPU就可以通過讀取接收數(shù)據(jù)寄存器(RDR)來讀到接收的數(shù)據(jù)。
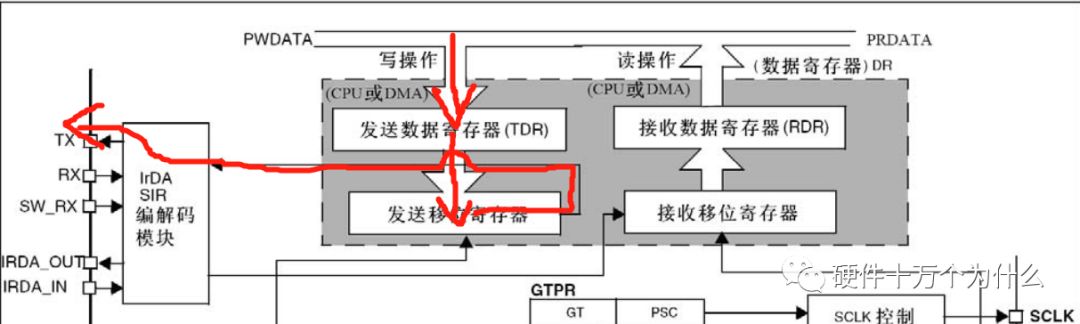
同樣,對于發(fā)送來說,CPU將數(shù)據(jù)寫入到發(fā)送數(shù)據(jù)寄存器(TDR),發(fā)送數(shù)據(jù)寄存器(TDR)將數(shù)據(jù)一次性的發(fā)送給發(fā)送移位寄存器,然后再根據(jù)波特率將數(shù)據(jù)一位一位的移出。如下圖:
我們知道,發(fā)送和接收事先要確定好波特率,那么波特率是怎么配置的呢?我們順著箭頭繼續(xù)往下找:
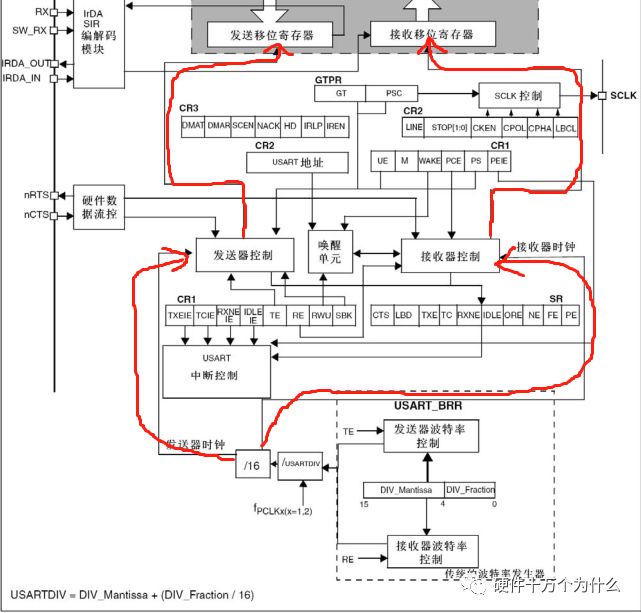
根據(jù)上圖所示,我們不難看出:波特率是通過發(fā)送控制器和接收控制器分別控制發(fā)送器時鐘和接收器時鐘,然后傳輸?shù)桨l(fā)送移位寄存器和接收移位寄存器中的。
通過上圖我們還可以看出:發(fā)送器時鐘和接收器時鐘來自同一單元。我們現(xiàn)在就來分析一下這兩個時鐘是怎么產(chǎn)生的。
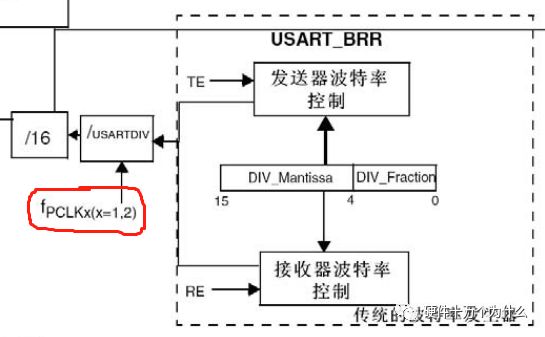
上文中已經(jīng)介紹過,波特率實際上就是每秒傳輸?shù)亩M(jìn)制位數(shù),通過對時鐘的控制可以改變波特率。我們向波特比率寄存器(即上圖中的USART_BRR)寫入?yún)?shù),修改了串口時鐘的分頻值USARTDIV。
USART_BRR寄存器包括兩個部分:DIV_Mantissa(即USARTDIV的整數(shù)部分)和DIV_Fraction(即USARTDIV的小數(shù)部分)。計算公式為:USARTDIV=DIV_Mantissa+(DIV_Fraction/16)。
波特率計算公式如下:

我們只要知道了USARTDIV的值,就可以知道串口波特率寄存器的值。
舉一個簡單的例子:假設(shè)我們串口1要設(shè)置的波特率為115200,PLCK2的時鐘頻率為72MHz,根據(jù)上面的公式,我們可以得出:
USARTDIV=72000000/(16*115200)=39.0625
由此 我們就可以得到DIV_Fraction=16*0.0625=1=0x01;
DIV_Mantissa=39=0x27。由于USARTDIV是對串口外設(shè)的時鐘源進(jìn)行分頻,不同的USART掛載的總線并不相同,所以它們的時鐘源fPCLK也不相同。USART1掛載在APB2總線上,其時鐘源為fPCLK2;USART2、3、4、5掛載在APB1上,其時鐘源為fPCLK1。串口的時鐘源經(jīng)過USARTDIV分頻后,分別輸出作為發(fā)送器時鐘及接收器時鐘,來控制發(fā)送和接收的時序。
三、程序分析
首先,我們打開iBox開發(fā)板的例程USART_DEMO,在左側(cè)的工程目錄中找到USER工程文件夾點擊前方的“+”,找到main.c文件并打開。
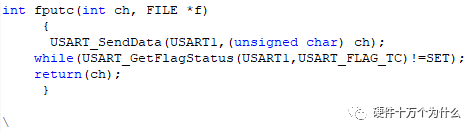
我們可以看到,在主函數(shù)上面有一個fputc(intch, FILE *f)函數(shù)。
這個函數(shù)的功能是將一個字符寫入到文件中。其參數(shù)包括:Ch要寫入的字符; *f指向FILE結(jié)構(gòu)的指針。
接下來我們來看一下主函數(shù):

上圖中的兩行代碼分別為定義GPIO結(jié)構(gòu)體和定義USART結(jié)構(gòu)體。

上面的函數(shù)是使能APB2總線上的串口時鐘,同時啟動GPIOA端口。

上圖中的代碼是對GPIO端口的配置。其配置方法在第三講中有提及到,我們可以看出其配置的是PA9端口。因為PA9端口同時也是USART1_TX,即串口的發(fā)送數(shù)據(jù)端口。
上圖中的代碼是對PA10端口的配置。因為PA10端口同時也是USART1_RX,即串口的接收數(shù)據(jù)端口。
我們看一下GPIO的工作模式:GPIO_Pin_9的工作模式為復(fù)用推挽輸出;GPIO_Pin_10的工作模式為浮空輸入。我們可以在STM32參考手冊中找到GPIO配置中關(guān)于USART的配置,如下表:
我們工作模式為全雙工,所以根據(jù)表格,配置好相應(yīng)的GPIO端口工作模式,分別為復(fù)用推挽輸出和浮空輸入。
接下來就是對串口的初始化和配置。如上圖所示。我們逐行分析。
在此之前,我們可以在工程目錄種先找到stm32f10x_usart.h(可以在main.c下面找到,因為我們的main函數(shù)包含了此庫函數(shù)),即USART庫函數(shù)。
我們可以在最下面找到許多函數(shù)聲明。我們可以在用戶手冊種找到這些函數(shù)的描述,大家可以簡單了解一下。

我們繼續(xù)瀏覽stm32f10x_usart.h庫函數(shù),可以找到typedef struct,如下圖(為方便截圖,在此已將注釋隱藏):
我們可以發(fā)現(xiàn) 我們程序種需要配置的USART相關(guān)參數(shù)都在這里有所聲明。不僅如此,繼續(xù)向下翻閱還可以找到所需配置的相關(guān)參數(shù)(由于代碼略多,在此不做截圖,讀者可自己查閱)。
uint32_t USART_BaudRate:該成員設(shè)置了USART傳輸?shù)牟ㄌ芈省?
uint16_t USART_WordLength:提示了在一個幀中傳輸或者接收到的數(shù)據(jù)位數(shù)。可取值為:USART_WoedLength_8b(8位數(shù)據(jù))和USART_WoedLength_9b(9位數(shù)據(jù))。
uint16_t USART_StopBits:在幀尾傳輸?shù)耐V刮弧F涠x為USART_StopBits_0.5(0.5個停止位)、USART_StopBits_1(1個停止位)、USART_StopBits_1.5(1.5個停止位)、USART_StopBits_2(2個停止位)。
uint16_t USART_Parity:奇偶校驗位。其定義為USART_Parity_No(不使用)、USART_Parity_Even(偶模式)、USART_Parity_Odd(奇模式)。
uint16_t USART_Mode:指定了使能或者失能發(fā)送和接收模式。其定義為:USART_Mode_Rx(接收使能)、USART_Mode_Tx(發(fā)送使能)。uint16_t USART_HardwareFlowControl:制定了硬件流控制模式是使能還是失能。其定義為:USART_HardwareFlowControl_RTS(發(fā)送請求RTS使能)、USART_HardwareFlowControl_CTS(清除發(fā)送CTS使能)、USART_HardwareFlowControl_RTS_CTS(RTS和CTS使能)。
USART_Clock、USART_CPOL、USART_CPHA和USART_LastBit在同步模式下才需要配置,在此暫時不做解釋。
了解了這些,對串口的初始化和配置分析就非常容易了。我們回到主函數(shù),觀察串口初始化和配置的幾行代碼:
上圖代碼是將波特率設(shè)置為115200。
上圖代碼定義了數(shù)據(jù)位數(shù)為8位數(shù)據(jù)。
上圖代碼設(shè)定了在幀尾傳輸一個停止位。
上圖代碼設(shè)定了不使用奇偶校驗。
上圖代碼設(shè)定了不使用硬件流控制模式。
上圖代碼定義了發(fā)送和接收模式:使能發(fā)送和使能接收。
上圖種兩行代碼第一行為串口初始化,第二行為使能串口。
最后,我們循環(huán)打印“USART Printf Example: retarget the C library printf function to the USART”。
接下來,我們觀察實驗現(xiàn)象:首先將程序燒錄到iBox中,然后我們使用USB轉(zhuǎn)TTL串口工具將iBox與電腦連接,如下圖所示:
iBox的J12接口從左到右依次為:TX、RX和GND(注意:我們沒有為iBox接電源,iBox需要單獨供電)。
接下來,我們打開串口助手。
如上圖:首先我們需要根據(jù)我們的程序配置串口(不同助手界面可能有所不同)。
設(shè)置好參數(shù)后,我們將程序燒錄到iBox中,觀察串口助手。
-
通信
+關(guān)注
關(guān)注
18文章
6209瀏覽量
137905 -
傳輸器
+關(guān)注
關(guān)注
0文章
41瀏覽量
13244 -
uart
+關(guān)注
關(guān)注
22文章
1277瀏覽量
104081
原文標(biāo)題:從原理圖PCB到移植RTOS【細(xì)說STM32】【四】UART
文章出處:【微信號:Hardware_10W,微信公眾號:硬件十萬個為什么】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
TDD協(xié)議的工作過程
POE供電的特性參數(shù)及工作過程
DMA工作過程及功能特性
DMA工作過程分析
STM32 PWM工作過程
IPOA的工作過程是怎樣的?
如何通過Multisim仿真分析數(shù)據(jù)選擇器的工作過程
UART串口WiFi模塊的工作原理及應(yīng)用
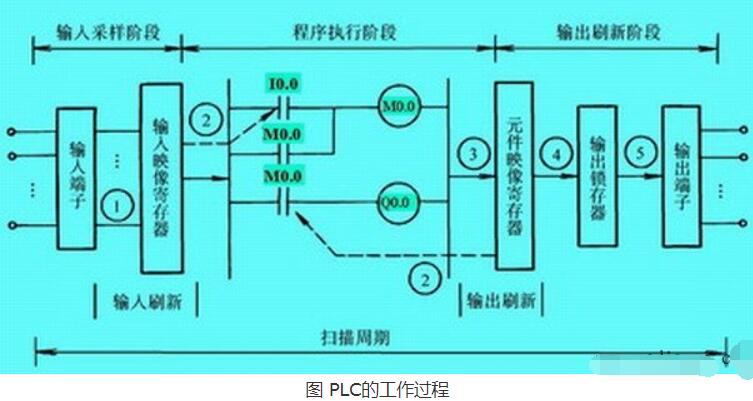
PLC的工作過程說明
西門子的PLC工作過程
UART接收的工作過程
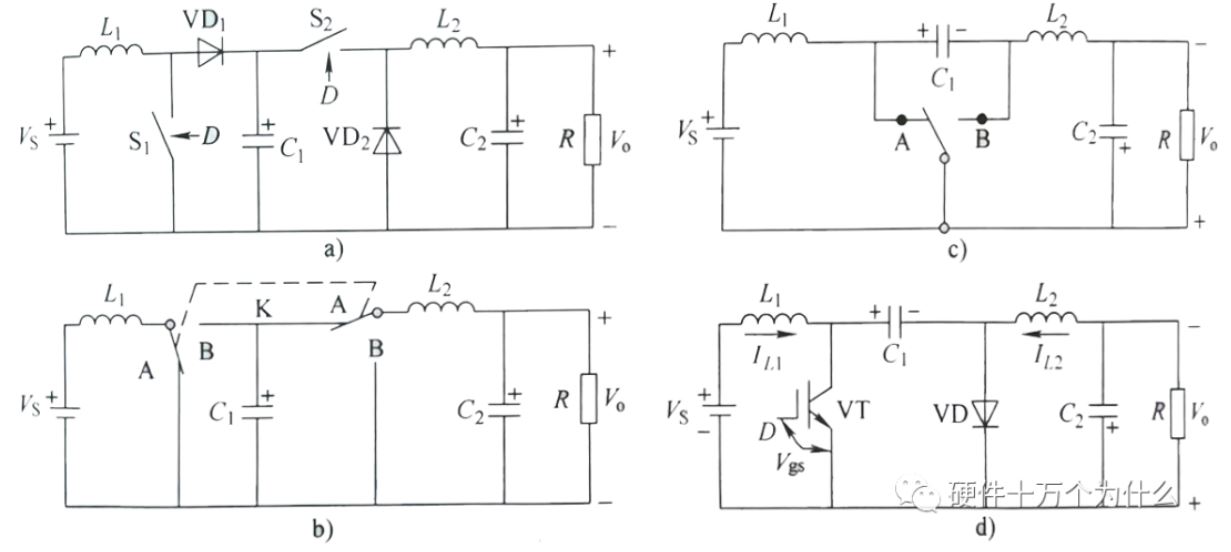
Zeta拓?fù)潆娫丛砑?b class='flag-5'>工作過程解析
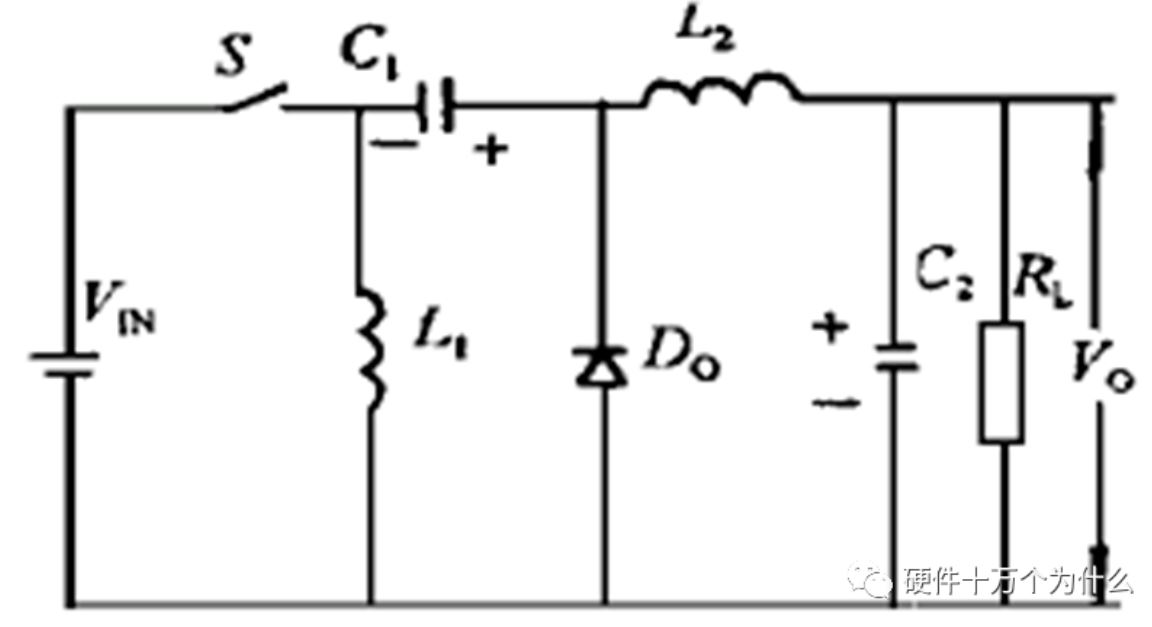
Cuk 拓?fù)潆娫丛砑?b class='flag-5'>工作過程解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論