 協作機器人的發展現狀分析 協作機器人如何殺出市場重圍
協作機器人的發展現狀分析 協作機器人如何殺出市場重圍
作者:包文濤,哈爾濱工業大學機器人研究所工學碩士,在機器人和工業自動化領域有超過10年的專業經驗。曾任職于ABB集團,先后在新加坡、美國、加拿大等地工作,在產品管理、技術方案、項目工程、服務以及組織建設和發展等方面擁有豐富的本土和國際化的知識和經驗。
系列文章將從下面幾個方面試圖解釋協作機器人的發展,及探尋激烈的市場下能夠存活的緣由:
1. Rethink公司為什么倒掉?
2. 為什么協作能夠興起?
3. ISO/TS 15066 協作機器人規范出籠,說明了什么問題?
4. 各協作機器人公司的技術起源
5. 國內協作機器人發展狀況
6. 協作機器人公司處于競爭不敗之地的緣由
下文將討論第二個話題
協作機器人-激烈的市場誰能殺出重圍
為什么協作機器人能夠興起?
2007年以來,協作機器人開始進入工業,探尋各種應用場合下推廣使用的可能。進入2014年后,協作機器人行業高潮迭起,無論資本投入還是企業規劃,協作機器人成為炙手可熱的機器人方向。然而協作機器人有多種不同的技術路線,有已經證明的可行的模式,也有仍然在試錯的路上,更多的一波又一波創業公司在資本的推動下涌入,道路崎嶇,前程未知。
2017年9月,國際機器人聯合會(IFR)發布了2017-2020年市場預測。其中在其主體報告中,著重強調了未來的趨勢:
?Robotswhich are easier to install, program and operate will unlock entry barriers tothe large, untapped market of small and medium enterprises (SMEs).
?Trendtowards having production closer to the end consumer driving the importance ofstandardisation & consistency across global brands.
?Collaborativerobots are shifting the traditional limits of “what canbe automated?”
?Collaborativerobots increase manufacturing flexibility as ‘lowvolume high mix’ becomes the new normal
?Collaborationis also about productivity with increased human/robot interaction
我們把國際聯合會的趨勢總結概括一下,可以用下面一句話總結:簡單易用、靈活、安全協作型的機器人,會更適應中小企業和全球性企業等不同生產的需求的需要,成為工業機器人發展的最主要趨勢。
為什么協作機器人能夠興起成為機器人發展的趨勢?這個話題要從機器人誕生至今的應用及技術積累的成熟度談起。其中有一款經典的機器人在推動機器人學的發展中起到了非常重要的作用。
世界上第一臺真正意義上機器人發明者是恩格爾伯格。1959年,恩格爾伯格和德沃爾發明了世界上第一臺工業機器人Unimate,它采用液壓執行機構的它龐大而又笨重,只能完成最簡單的搬運動作。
恩格爾伯格是工業機器人的發明者,其創立的公司是工業機器人的先驅。這家叫Unimation的公司的產品,仍然活躍在機器人界,只不過Unimate這個產品的名字不常見,取而代之的是一個叫Staubil公司集成和發展了Unimation公司的產品,這個是后話。
Unimation公司在機器人界占據非常重要的地位,讓我們先看看這家公司的歷史。創始人恩格爾伯格1925年生于紐約,先后獲得哥倫比亞大學物理學士和電子工程碩士學位。1950年,恩格爾伯格讀到了阿西莫夫的小說集《我,機器人》(I, Robot),愛不釋手,產生了制造機器人的念頭。1956年的一場酒會,他偶遇發明家德沃爾(George C. Devol)。后者提到,他剛剛申請了一個專利,叫做“可編程的用于移動物體的設備”(Programmed Article Transfer)。恩格爾伯格脫口而出,“這不是阿西莫夫筆下的機器人嗎!”兩人一拍即合,決定合作創立一家生產機器人的公司——Unimation。
1958年Unimation產生了一個機械手臂,它實際上類似于人手臂的形狀,也就是我們現在俗稱的機器人。這臺機器人具有類似人手的靈活度,但是機器人的成本也非常高,根據當時的情況只有大公司才能用得起。鑒于此,恩格爾伯格將機器人的用戶瞄準了大公司。
1961年,經過長時間努力和說明,通用汽車在新澤西州的一個工廠安裝使用了第一臺Unimation的機器人。這個是歷史可查的第一臺機器人用于工業。這臺機器人和人相比,在使用中有明顯的優勢,比如機器人可以在例如焊接、搬運等重復性的場合,不知疲倦,效率很高;同時在有毒或者其他危險的場合,也比人更有優勢。
通用汽車開始訂購更多的機器人,安裝在各地的工廠,承擔的工作擴展到焊接、油漆、粘合和裝配。這種使用使得通用汽車率先自汽車行業實現了自動化生產,鞏固和擴大了通用汽車在行業領先地位。于此同時福特汽車、克萊斯勒等其他汽車公司紛紛跟進,將機器人用于各自的汽車生產流水線。
這樣,機器人在汽車行業率先開始使用!
Unimation后授權其技術給川崎重工和GKN,在日本和英國分別制造Unimate機器人。后續日本汽車工業開始引進機器人,在生產線開始部署使用機器人來代替人工操作。日本人以其工作認真、做事精益的作風將機器人的使用的價值充分發揮。后來,日本誕生了許多世界級的機器人公司,從最開始引進機器人技術的川崎公司,到后來合資成立的發那科,安川等,日本機器人公司在機器人界占據了重要位置。
汽車大規劃生產使用的機器人,我們一般稱之為傳統機器人。機器人進入工業生產,其在汽車行業一直占據著舉足輕重的位置。據統計,2010年之前,全世界用于汽車工業的機器人也已經達到總用量的37%,用于汽車零部件的工業機器人約占24%,加起來用在汽車行業的比例超過50%,在有些國家可能比例更多,比如美國、歐洲、日本等發達國家。
這樣,機器人的應用在汽車行業有了廣泛的應用基礎。各機器人公司的產品形態涉及更為廣泛,其中串聯機器人技術最具競爭力,在各個場合串聯機器人的應用范圍也最為廣泛。
2003年,Esben ?stergaard在南丹麥大學接受一個課題研究,就是為食品行業尋找方便使用、靈活、能滿足產品切換的解決方案。他和合作伙伴Kasper St?y 和 Kristian Kassow 找遍市場上所有已經存在的機器人,也都無法找到一款能滿足靈活易用、無需特殊防護就能使用的機器人。當時機器人市場的主要產品是大型、昂貴且笨拙的機器人。我們在《揭秘Rethink公司為何倒閉!“協作機器人-激烈的市場誰能殺出重圍”》中也提到,Rodney Brooks在為iRobot尋找能夠代為生產的工廠時,發現現有的工廠無法滿足生產要求的需求,這是萌發要做一款容易使用、價格便宜的機器人的初衷。至于這段歷史,網上無更多公開的消息。iRobot之前的業務并不集中,其中軍方配合的項目在成立公司的頭10年里是主要的業務,iRobot 涉及民用服務機器人在2002年后,這個是公司能否發展壯大并且上市的主要的原因。在Rodney Brooks2008年成立Rethink公司前,我們推測應該是2005-2007年間,他發現工廠的生產和他需要的生產并不匹配,繼而萌發要創造一款易用、靈活、價格低廉的機器人。
2005年,Esben ?stergaard,Kasper St?y 和 Kristian Kassow 創立了Universal Robots (優傲機器人), 基于一個理念:“要研發一種易于安裝和使用的輕型機器人”,并且致力開發中小企業也能承受的機器人技術, 這個想法和后來的Rodney Brooks創立 Rethink公司初衷類似。同年丹麥國家投資基金批準了Syddansk創新投資基金的企劃書,并會同Syddansk創新投資基金參與了對Universal Robots (優傲機器人) 的投資和管理。后來Universal Robots (優傲機器人)的產品獲得了廣泛關注,到目前為止UR機器人在協作機器人廠家中市場份額最大,引領者協作機器人行業的發展。
協作機器人興起的原因歸結如下:
第一、 世界的生產的模式和生產方式發生了巨大變化!
2000年之后,我們看到機器人使用方式迫切需要轉型。機器人使用集中的汽車行業,在發達國家很少再有大規模的工廠上馬。例如,最近寶馬汽車在一份聲明中表示,將投資10億歐元(合11.7億美元)在匈牙利新建組裝廠,這是近二十年來寶馬在歐洲建的首家工廠;另一方面,規模化的工業生產從2000年后慢慢開始轉移到亞洲等人力低成本的國家。規模化的生產企業,借助中國、越南、泰國等人口紅利,漸漸地把工廠從歐洲轉移,甚至低成本的工業消費品生產企業逐漸關閉,因為進口發展中國家的產品價格更為便宜。我們說逐利是資本主義萬惡的源泉,對于企業競爭來講,這是一個無法忽略的事實。
中小企業(Smalland Medium Enterprises)
以歐洲為例,規劃化的工業生產轉移之后,歐洲無法轉移的中小企業(Small and Medium Enterprises)有非常多。中小企業是世界各經濟體的重要組成部分。各經濟體對中小企業的界定標準不盡相同,且隨著經濟的發展而動態變化,但中小企業在經濟體中扮演的關鍵角色卻不容置疑。在歐洲,商業活動的 95 以上%由中小企業完成,60%-70%以上的雇員服務于中小企業。在美國,中小企業數量已占全部企業總數的 99.9%,除務農人員外約 有 1.2 億工人,其中 50%在中小企業工作。例如食品行業在歐洲就是一個廣泛存在的行業,它供應在歐洲居民每天食用的奶酪、面包、蔬菜等,由于供應量和保質期的原因,其生產不可能轉移到其他國家,這樣這些生產就必須要保留在本地。
第二、 機器人技術的發展日益成熟
任何一種新產品和新技術的推出,都是在當前產品的基礎上迭代更新,推出更為完善的產品,機器人行業也是如此。
80年代,一款經典機器人的出現對于機器人學的發展起到了非常重要的推動作用,那就是——PUMA-560。
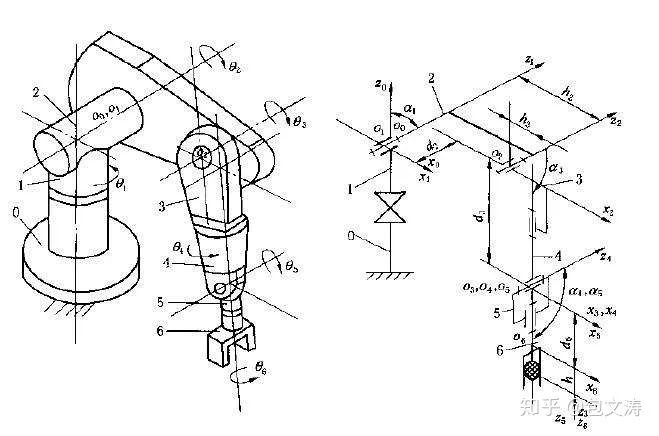
PUMA-560機器手也是Unimation公司的產品,是一款在機器人歷史上經典的工業機器人, 它有6自由度,負載2kg,采用直流伺服。PUMA-560采用類人的手臂的機械結構, 由一系列剛性連桿和通過一系列柔性關節交替連接而成串聯鏈接結構。關節之間采用連桿,連桿在和人的手臂連接類似, 通過中間的活動關節分別連接類似于人的上臂和下臂, 整個機械手和人類比的話,本體相當于人的肩關節、肘關節和腕關節。
Puma系列機器人的誕生,在工業和科研領域都有重要影響。機器人的初學者都是以這款機器人為基礎,正逆運動學的問題通過解析法和迭代法等傳統計算方法進一步驗證和改進。機器人學的一系列經典教材均用Puma560為教具來講工業機器人的理論。如美國人付京遜的《機器人學》作為機器人學的經典教材,直到今天內容仍然比較完善,在國內幾個著名的機器人研究所,作為研究生的教材仍然有不少人在使用。
機器人動力學和運動學的發展,是隨著新型傳動與驅動機構以及智能與軟物質材料的出現,可以預計柔性化、軟性化、可變化、微型化和控制智能化,讓新型功能機器人的出現有可能。
機器人的各種形態和作動仍然類似生物體的仿生體,這種結構注定從Puma到新的機器人出現都不應該有較大偏離。例如新能源汽車,雖然內部的結構已經發生很大改變,但是在形態上和傳統燃油汽車仍然一樣,汽車沒有變成6個輪子或者長相怪異。汽車內燃發動機被新型交直流電機取代,加注的燃油被可以反復充電的鎳氫等電池取代。變化的結果是新能源汽車在性能上讓人車交互等新型智能網聯系統更為完善,滿足人的多樣性的需求,繼而進一步激發人們購買的熱情。
第三、 易用和靈活是剛需,但可靠性壓倒一切
傳統機器人在部署60年后,越來越突出的瓶頸就是交互性不夠。交互性體現在三個方面:
(1)易用
易用性最為直接是拖動示教。借助機器人的動力學模型,控制器可以實時的算出機器人被拖動時所需要的力矩,然后把提供該力矩給電機使得機器人能夠很好地輔助操作人員進行拖動。力矩的計算如下列公式所示:

其中

公式中的是通過逆動力學算得的電機所需要的力矩,其計算公式包括慣性力項、科里奧利力 和離心力項、重力項 以及摩擦力項。而當中的根據選擇的摩擦力模型可以分解為粘性摩擦力項、庫侖摩擦力項以及補償。
摩擦力的計算是相對復雜的數學模型。基于目前技術的實現方式,有無傳感補償技術;加外置力傳感器反饋優化模型計算;彈性裝置伸縮模型計算等。這一步每家機器人公司均有獨特優勢,可以達到無重力拖動示教功能。
(2)靈活
機器人要增強和人的互動性,還需要把機器人當成工具使用,這就要求機器人的使用更加靈活。機器人本體重量必須要輕,在需要的場合,工人可以任意搬動和簡單安裝,機器人盡快投入使用。
中空無框電機直接集成至關節軸中,組成模塊結構。電機可嵌入機器人底座中,并直接驅動負載,可進行高精度的水平運動和力度控制。在操作過程中,它們能識別對象的大小和柔性,并相應地調節所施加的力。模塊結構,可以讓同類型的關節之間實現更快互換,技術機器人關節出現問題,可以在10-30分鐘之內完成互換。
于此同時,機器人本體的重量進一步降低,可以實現凈重和承載力的特殊比率,這些都是先進的輕質結構帶來的結果。
(3)安全
機器人和人交互,必須要保證的是人類安全,碰撞檢測是協作機器人務必要達到的功能。
傳統機器人也有碰撞檢測功能,但是傳統機器人碰撞檢測的目的一般是為了減少碰撞力對機器人本體的影響,避免機器人本體或者外圍設損壞。
協作機器人碰撞檢測的功能是為了解決人和機器人共融的問題。其實現的方式,有借助力感知皮膚,關節力矩傳感器,電流估算力反饋模型等方式。在實現的方式上,務必需要體現碰撞力的設置,以滿足不同環境下力的靈活設置。
在上述易用、靈活、安全滿足要求的前提下,可靠性是無論如何要滿足的因素。歸根接地,易用、靈活、安全是解決了操作者調試時的難題,這個時間進一步壓縮,可能只占機器人生命周期使用時間的10%甚至更少。更多時間,機器人是留在生產線,完成單調周而復始的工作,這個期間工業效率將回到傳統機器人的使用模式,工廠將注重考查節拍和產出。協作機器人必須要能達到和傳統機器人類似的可靠性要求。
協作機器人從適應生產關系和生產方式出發,注定可以解決從21世紀初開始出現的生產中的難題。協作機器人可以靈活的和人配合,迅速投入生產,部署在如上下料,螺絲擰緊,拋光打磨等應用場合。過去需要長達多天甚至數周才能完成的應用,如今可以縮短到一兩天甚至數小時內完成。縱然協作機器人略有缺陷,如負載不高,速度不快,但是縱觀生產使用的場合,絕大部分的應用場合均可以得到滿足。協作機器人越來越多的案例證明,也讓更多的客戶有了使用上的信心,協作機器人行業也蓬勃發展開來。
未來智能實驗室是人工智能學家與科學院相關機構聯合成立的人工智能,互聯網和腦科學交叉研究機構。
未來智能實驗室的主要工作包括:建立AI智能系統智商評測體系,開展世界人工智能智商評測;開展互聯網(城市)云腦研究計劃,構建互聯網(城市)云腦技術和企業圖譜,為提升企業,行業與城市的智能水平服務。
-
機器人
+關注
關注
211文章
28524瀏覽量
207552 -
協作機器人
+關注
關注
2文章
493瀏覽量
30175
原文標題:為何協作機器人能夠興起?“協作機器人-激烈的市場誰能殺出重圍”
文章出處:【微信號:AItists,微信公眾號:人工智能學家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論