") 遠紅外成像技術將迎來成長期
遠紅外成像技術將迎來成長期
歐洲新車評價發(fā)布組織(E-NCAP)在2018版E-NCAP中再次引入了一系列新的測試,包括新增騎行人引入AEB測試,測試場景新增黑暗和朦朧的照明條件下進行行人檢測、使用障礙物來隱藏被測試車輛(VUT)的目標等。
而目前在國內(nèi)2018版本C-NCAP的測試標準中AEB暫時只針對白天場景、無障礙物來隱藏被測試車輛(這就是為什么我們經(jīng)常看到一些測試車輛前方都是空曠一片,天氣艷陽高照),顯然這并不符合真實路況,也并不能真正驗證AEB功能有效性。
有數(shù)據(jù)顯示,夜間交通事故率比白天大1.5倍,60%以上的重大交通死亡事故發(fā)生在夜間。據(jù)公安部統(tǒng)計,夜間30-40%車禍源于濫用遠光燈,這會造成人眼和普通攝像頭的短時間“失明”。
在過去的幾年時間里,在自動駕駛領域更多的技術研發(fā)人員討論的是可見光攝像頭、超聲波/毫米波雷達、激光雷達等傳感器,以及圍繞如何選擇和配置這些傳感器的爭論。
關于紅外夜視傳感器,卻極少被提及。但在Uber的自動駕駛車輛在亞利桑那州發(fā)生備受關注的夜晚致命事故之后,似乎業(yè)界開始重新審視這個問題。
有一家遠紅外技術方案工程團隊對事故發(fā)生時的駕駛場景做了一次模擬,在汽車配備了激光雷達等傳感器之外再配備了熱成像傳感器,那么可以早5秒檢測到行人(目前的熱成像傳感器可以檢測到250米以上,甚至到400米的距離)。
我們知道,自動駕駛車輛(或者具備ADAS功能)最基本的需求是能夠在所有條件下“盡早看到”所有物體和周圍環(huán)境,同時為決策提供足夠的反應時間。
目前的可見光攝像頭還無法滿足這樣的需要(盡管目前不少攝像頭CMOS傳感器已經(jīng)加入了近紅外功能,可以解決朦朧照明條件下的問題,但無法應對黑暗條件)。
為了解決這個問題,一種目前主流方案是可見光攝像頭、毫米波雷達、激光雷達融合方案,但三種主流傳感器仍然各自存在不小的局限。
傳統(tǒng)意義上的夜視主要有三種技術路線,微光夜視、紅外夜視(又分為近紅外、遠紅外)。微光夜視體積小,價格低,但易受周邊環(huán)境影響。
而紅外(IR)是電磁輻射的七種類型之一。所有溫度高于絕對零度的物體發(fā)出紅外光。這種光的強度與物體的溫度有關:物體的溫度越高,它發(fā)射的紅外線就越多。
其中波長為0.78~2.0微米的部分稱為近紅外(NIR),波長為2.0~1000微米的部分稱為熱紅外線(FIR)。目前,幾大車載攝像頭CMOS傳感器廠商都有集成近紅外(NIR)技術,但更多是解決傳統(tǒng)可見光攝像頭在低照度環(huán)境下提高感光芯片靈敏度。
而遠紅外傳感器在軍事和航空領域已經(jīng)應用多年,因此它是一種成熟的技術,適合于大規(guī)模市場。相比于近紅外,遠紅外攝像頭則可以做到車輛在白天或晚上任何條件下可靠地檢測、分割和分析行人、動物、物體和道路狀況,而不管天氣狀況如何。
此外,遠紅外比激光雷達和雷達給出了更多的物體細節(jié),比如陰影對圖像的影響最小,溫暖的物體在寒冷的環(huán)境中表現(xiàn)出很高的對比度,使它們易于辨認等等。
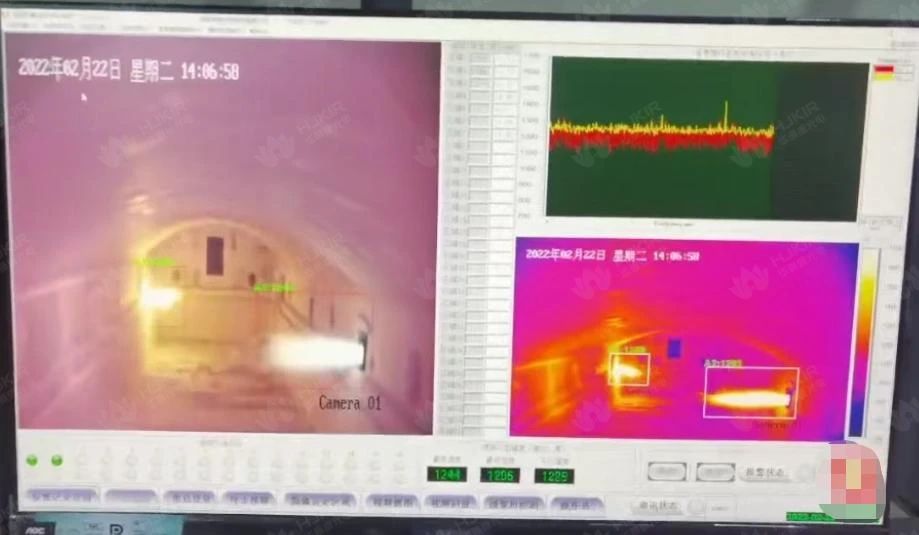
當然,遠紅外與可見光攝像頭視覺還是有很大的融合和冗余優(yōu)勢。在比較下面兩幅圖像時,可以通過遠紅外監(jiān)測所有的溫暖點來很容易地找到四個行人。
通過直接與CMOS圖像進行比較,可以確認具有模糊圖形的暖輪廓為行人,并且通過將它們與IR圖像中的暖點匹配,可以確認CMOS圖像中看作行人的任何形狀。
在這種情況下,IR和CMOS圖像都可以被描述為冗余的,因為兩者都被用于定位行人。這種成像冗余是有益的,因為來自兩個圖像的信息內(nèi)容不同,并且可以用于以更高的概率檢測和分類目標。這是兩種攝像頭傳感器融合在實踐中的概念。
同時,采用基于深度學習計算機視覺算法的遠紅外也可以同樣提供準確的目標檢測,分類,和場景分析。最大的好處之一是在雜亂的夜晚環(huán)境中(比如車流人流混雜的交叉十字路口)看到人的能力。
由于增加了熱量的參數(shù),這使得機器學習系統(tǒng)更容易檢測和分類某些對象,如車輛、人和動物。由于熱傳感器具有高的點云密度和在所有照明條件下都能夠以高對比度可視化活體目標。(上圖左側(cè)的可見光攝像頭幾乎看不到向左跑動的人。而右側(cè)的遠紅外攝像頭則可以很清楚的框出所有人。)
今天的自動駕駛傳感器套件大多數(shù)由可見光、雷達、激光雷達和超聲波傳感器組成。在這組傳感器中增加一個遠紅外熱成像傳感器可以降低整體成本,因為它需要匹配的固態(tài)激光雷達系統(tǒng)分辨率更低。
通過添加遠紅外熱成像傳感器,可以使用來自可見光和遠紅外攝像頭的密集點云信息在所有天氣和照明條件下進行分類,并且依靠雷達和激光雷達進行測距。
問題來了,為什么大家目前對遠紅外傳感器并不關注?除了成本問題之外,在大多數(shù)情況下,一些開發(fā)人員還沒有把注意力放在夜間自動駕駛上,而是把注意力集中在白天在最佳條件下駕駛上。
同時,在ADAS級別,監(jiān)管評估和安全評級中的測試條件還非常有限,大多都是針對白天場景,汽車制造商幾乎沒有什么“動力”去考慮紅外夜視,畢竟目前看還是一筆不小的成本。
但事實是,基于紅外夜視系統(tǒng)利用紅外光波檢測物體自然發(fā)射的熱量差異,可以檢測到可見光攝像頭、雷達和激光雷達不能識別的物體。
至關重要的是,它們在微光和惡劣天氣的情況下表現(xiàn)依舊良好(盡管毫米波雷達具備全天候檢測能力,但誤報率和漏檢率的提升還需要其他傳感器的配合)。
目前,在整車量產(chǎn)配置上,寶馬是較早導入夜視系統(tǒng)的廠商之一。自2006年3月起,中國市場銷售的BMW 760Li和BMW 760Li個性化版本車型開始裝備全新的BMW夜視系統(tǒng)。
2012年推出的奧迪A7也同樣開始配置了遠紅外成像攝像頭,帶有行人識別功能的夜視輔助系統(tǒng)能夠捕捉前方24度內(nèi)300米內(nèi)的熱源,當熱源出現(xiàn)在捕捉范圍內(nèi),經(jīng)過電腦處理的圖像會在儀表盤中以黑白對比色進行顯示。
但近幾年紅外夜視正在打破過去豪華車的配置局限。今年上市的PSA旗下高端豪華汽車品牌DS的DS7成為了紅外夜視系統(tǒng)首次下探到30萬元級別車型。
DS7搭載的紅外成像系統(tǒng)又被稱為DS NIGHT VISION功能,安裝在前格柵中的紅外攝像機能夠有效識別前方15米至150米之間超過50厘米高的人和動物,并提示駕駛者。
前方狀況清晰呈現(xiàn)在全液晶高清儀表板中,潛在危險顯示為黃色,當危險接近,黃色會逐漸示為紅色,并配合系統(tǒng)發(fā)出的音響警報作為提醒,便于作出更及時的準備和應對策略。
而目前全球提供量產(chǎn)級別遠紅外夜視方案的公司主要是奧托立夫、FLIR Systems、AdaSky以及中國的軒轅智駕(上市公司高德紅外旗下)。其中,奧托立夫、FLIR因為較早進入市場占據(jù)目前主要份額。
作為目前國內(nèi)唯一自主研發(fā)上游芯片并率先量產(chǎn)車載紅外夜視的軒轅智駕,其“基于高德紅外自主探測器”的新一代熱成像避障系統(tǒng),具備突破夜障、強眩光、穿透霧霾沙塵、行人識別及報警、前車碰撞報警和預告等多項功能。
這款采用紅外熱成像技術的紅外避障系統(tǒng),能夠捕捉前方28°*21°視角、400米外熱源,夜視距離超過了目前市面上大多車載夜視系統(tǒng)探測距離在200m左右的性能瓶頸。同時,系統(tǒng)會自動匹配不同車速進行功能調(diào)整。
到今年底,軒轅智駕還會推出400×300/17微米模塊化產(chǎn)品,成本更低。明年會陸續(xù)推出400×300/12微米以及800×600/12微米模塊化產(chǎn)品,當然成本會越來越低。
可以預見的是,隨著中國供應商的加入、相關ADAS法規(guī)及測試場景完善,以及夜視安全性逐步得到消費者的認可,遠紅外成像技術將在未來幾年進入新一輪成長期。
-
adas
+關注
關注
309文章
2186瀏覽量
208705 -
紅外成像
+關注
關注
0文章
93瀏覽量
11316
原文標題:E-NCAP增加黑暗場景下AEB測試,紅外夜視或成主流配置 | GGAI頭條
文章出處:【微信號:ilove-ev,微信公眾號:高工智能汽車】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
颯特紅外熱成像技術的創(chuàng)新應用
紅外熱成像技術將迎來新的發(fā)展機遇
基于紅外成像技術的安全監(jiān)控云平臺解決方案


一文讀懂車載紅外熱成像技術

電力巡檢中紅外熱成像技術的實時監(jiān)測應用
紅外熱成像檢測氣體泄漏情況

紅外熱成像在鋼鐵冶金領域的應用

紅外熱成像技術在醫(yī)療健康領域的應用
無人機+紅外熱成像技術優(yōu)勢

紅外熱成像技術是怎樣應用在安防監(jiān)控上?
紅外熱成像檢測在煙草工業(yè)中的應用
紅外熱成像技術:預防煤田火災隱患





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論