 多維度對比激光SLAM與視覺SLAM
多維度對比激光SLAM與視覺SLAM
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
由于傳感器種類和安裝方式的不同,SLAM 的實現方式和難度會有一定的差異。按傳感器來分,SLAM 主要分為激光 SLAM 和 VSLAM 兩大類。其中,激光 SLAM 比 VSLAM 起步早,在理論、技術和產品落地上都相對成熟。基于視覺的 SLAM 方案目前主要有兩種實現路徑,一種是基于 RGBD 的深度攝像機,比如 Kinect;還有一種就是基于單目、雙目或者魚眼攝像頭的。VSLAM 目前尚處于進一步研發和應用場景拓展、產品逐漸落地階段。
激光 SLAM:早在 2005 年的時候,激光 SLAM 就已經被研究的比較透徹,框架也已初步確定。激光 SLAM,是目前最穩定、最主流的定位導航方法。
激光 SLAM 地圖構建
VSLAM(基于視覺的定位與建圖):隨著計算機視覺的迅速發展,視覺 SLAM 因為信息量大,適用范圍廣等優點受到廣泛關注。
(1)基于深度攝像機的 Vslam,跟激光 SLAM 類似,通過收集到的點云數據,能直接計算障礙物距離;
(2)基于單目、魚眼相機的 VSLAM 方案,利用多幀圖像來估計自身的位姿變化,再通過累計位姿變化來計算距離物體的距離,并進行定位與地圖構建;
視覺 SLAM 地圖構建,圖片來源:百度 AI
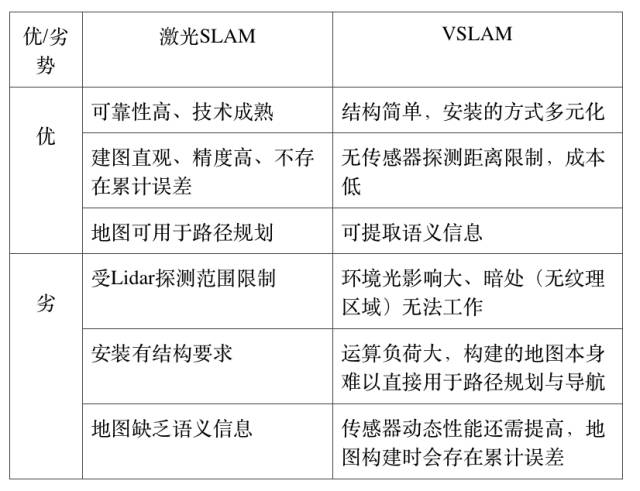
一直以來,不管是產業界還是學術界,對激光 SLAM 和 VSLAM 到底誰更勝一籌,誰是未來的主流趨勢這一問題,都有自己的看法和見解。下面就簡單從幾個方面對比了一下激光 SLAM 和 VSLAM。
成本
不管是 Sick,北洋,還是 Velodyne,價格從幾萬到幾十萬不等,成本相對來說比較高,但目前國內也有低成本激光雷達(RPLIDAR)解決方案。VSLAM 主要是通過攝像頭來采集數據信息,跟激光雷達一對比,攝像頭的成本顯然要低很多。但激光雷達能更高精度的測出障礙點的角度和距離,方便定位導航。
應用場景
從應用場景來說,VSLAM 的應用場景要豐富很多。VSLAM 在室內外環境下均能開展工作,但是對光的依賴程度高,在暗處或者一些無紋理區域是無法進行工作的。而激光 SLAM 目前主要被應用在室內,用來進行地圖構建和導航工作。
地圖精度
激光 SLAM 在構建地圖的時候,精度較高;VSLAM,比如常見的,大家也用的非常多的深度攝像機 Kinect,(測距范圍在 3-12m 之間),地圖構建精度約 3cm;所以激光 SLAM 構建的地圖精度一般來說比 VSLAM 高,且能直接用于定位導航。
易用性
激光 SLAM 和基于深度相機的 VSLAM 均是通過直接獲取環境中的點云數據,根據生成的點云數據,測算哪里有障礙物以及障礙物的距離。但是基于單目、雙目、魚眼攝像機的 VSLAM 方案,則不能直接獲得環境中的點云,而是形成灰色或彩色圖像,需要通過不斷移動自身的位置,通過提取、匹配特征點,利用三角測距的方法測算出障礙物的距離。
安裝方式
雷達最先開始應用于軍事行業,后來逐漸民用。被大家廣泛知曉最先應該是從谷歌的無人車上所知道的。當時 Velodyne 雷達體積、重量都較大,應用到一些實際場景中顯然不適合。比如無人機、AR、VR 這種,本身體積就很小,再搭載大體積的激光雷達的話,根本無法使用,也影響美感和性能。所以 VSLAM 的出現,利用攝像頭測距,彌補了激光雷達的這一缺點,安裝方式可以隨著場景的不同實現多元化。
其他
除了上面幾點之外,在探測范圍、運算強度、實時數據生成、地圖累計誤差等方面,激光 SLAM 和視覺 SLAM 也會存在一定的差距。
比如:
注:左為 Lidar SLAM,右為 VSLAM,數據來源:KITTI
可以明顯看出,對于同一個場景,VSLAM 在后半程中出現了偏差,這是因為累積誤差所引起的,所以 VSLAM 要進行回環檢驗。
激光 SLAM 是目前比較成熟的定位導航方案,視覺 SLAM 是未來研究的一個主流方向。所以,未來,多傳感器的融合是一種必然的趨勢。取長補短,優勢結合,為市場打造出真正好用的、易用的 SLAM 方案。
-
機器人
+關注
關注
211文章
28381瀏覽量
206919 -
SLAM
+關注
關注
23文章
423瀏覽量
31822 -
激光雷達
+關注
關注
968文章
3969瀏覽量
189830
原文標題:對比激光SLAM與視覺SLAM:誰會成為未來主流趨勢?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是SLAM?視覺SLAM怎么實現?

基于視覺的slam自動駕駛
激光SLAM與視覺SLAM必將融合 移動機器人核心技術將不斷升級
科普|視覺SLAM是什么——三種視覺SLAM方案
視覺SLAM與激光SLAM有什么區別?

機器人主流定位技術:激光SLAM與視覺SLAM誰更勝一籌
基于深度學習的視覺SLAM綜述
視覺SLAM開源方案匯總 視覺SLAM設備選型

視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀






 工商網監
工商網監
評論