


看到有Freescale贊助的智能小車大賽,好像是地面上有一條黑色的軌道線,請設計一輛可按軌道自動前進的小車?
參加競賽的朋友第一想法就是要讓小車能自動識別黑色的軌道,這個想法是對的,不過后面的想法就不一定是簡潔有效了,通常都會想到裝一個攝像頭,然后讓程序從圖像中識別出軌道線,進而控制小車的運轉。
不能說這種處理方法不對,如果從系統設計和程序編寫來說,如果一個新人從頭到尾做下來,相信能力會得到很大的提升,今天我要說一個簡單的方法,完全不需要如此復雜的系統和程序,甚至不用單片機都可以實現。
許多年前我們做過一個類似的樣板,不過并不是我們自己想的方法,是在一本書上找到的。在車頭的兩側分別裝一個光敏三極管,用套管封好后感應面向下,兩路光敏管的輸出接為一個比較器的兩路輸入,比較器的輸出用來來驅動一側的車輪,反相后又用來驅動另外一側的車輪。
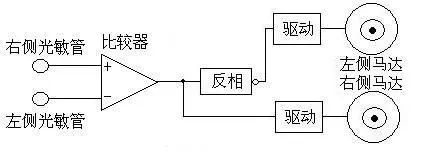
圖一簡單自動尋軌小車電路示意圖
從圖一我們可以看出,如果右側光敏管的輸出電壓大于左側,比較器就會輸出高電平,此時右側馬達轉動,左側停止,反之是左側轉動右側停止。
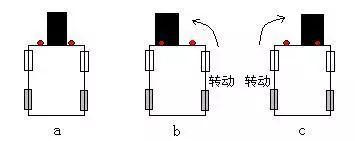
圖二小車工作狀態示意圖
圖二a左右兩個光敏管的輸出相近,此時左右兩個車輪會被隨機驅動;圖二b因為右側光敏管下面為淺色,左側光敏管下面為黑色,所以右側光敏管輸出幅度大,右輪被驅動,小車前進的同時車頭向左側轉;圖二c和b的情況剛好相反,當從b狀態轉化成c狀態后小車就會反相轉。這樣小車就會車頭左右擺動,同時順著黑色的軌跡自動前進,只是要防止車速過快沖出軌道。
這樣我們不用單片機就實現了小車自動尋軌的功能,如果再用一個簡單的單片機對光敏信號進行更細致的處理,只要簡單的程序就可以實現各種控制。
說完智能小車再說另外一個有點關聯的應用,智能小車可以理解成最簡單的顏色識別,通過黑白兩種顏色來判斷軌道,接下來我會講一種更精細的顏色測量方法,同樣我們不需要利用攝像頭。
還是利用光敏管,但這次直接用光敏管會存在問題,不同的顏色有可能反射的光強度一致,比如淺紅和淺綠光敏管輸出電壓就有可能一樣,這樣就有許多顏色無法識別。
我們知道一個物體,對于不同顏色的光吸收效果不同,同樣反射效果也不同,比如紅色的物體,對于紅色的光反射最強,比較少吸收,其它顏色的光則吸收得厲害一些。如果我們利用這一特性,就有可能利用光敏管進行精確的顏色識別。
假設我們用紅綠藍三種顏色的分別照射被測物,根據三原色原理可知不同顏色的物體對這三種光的吸收反射效果不同,紅色物體主要反射紅色,綠色反色綠色,藍色反射藍色。
如果在這三種顏色照射被測物的同時用光敏管測反射光強度,實際上就間接的測出了被測物三原色的成分(電壓幅度與顏色分量不是1:1線性關系,但趨勢一致),這樣就實現了顏色的精確識別。
以前我們的實驗即便是超過一百種顏色的標準色卡,都可以分毫不差的識別出來,當然這是在自我矯正之后才達到的效果。實際應用需要考慮發光二極管的發光強度具有較大的離散性,每一套都需要提前進行自我矯正,并將矯正數據保存在課保持存儲器中。另外藍色發光二極管價格昂貴,建議改用紅綠黃或橙黃綠。
也許,有些時候并不一定需要很復雜的方法就能實現你的想法。
-
三極管
+關注
關注
145文章
3657瀏覽量
124578 -
比較器
+關注
關注
14文章
1845瀏覽量
109035 -
智能小車
+關注
關注
87文章
554瀏覽量
82384
原文標題:【每日方案】Freescale智能小車與顏色識別
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
【CANNON申請】智能小車開發
智能小車地面控制端的設置
【大聯大品佳 Nuvoton ISD9160語音識別試用申請】智能小車的語音控制

如何使用CMOS攝像頭進行智能小車的的設計與實現
如何使用Freescale16位單片機和CCD傳感器進行智能小車的設計
基于顏色識別的智能小車集群控制資料下載

視覺顏色識別與傳感器顏色識別的區別
視覺顏色識別與傳感器顏色識別的區別






 工商網監
工商網監

評論