 深度分析LiDAR技術
深度分析LiDAR技術
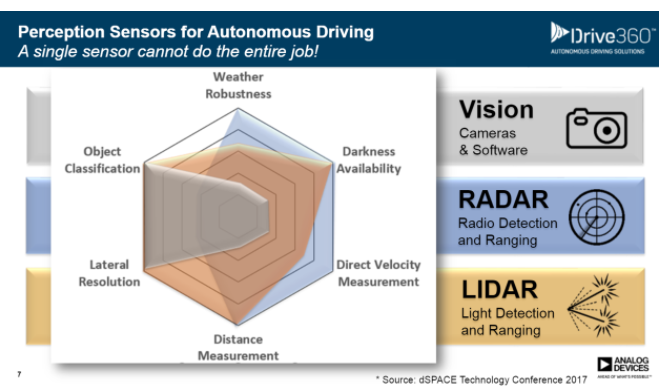
相對于傳統測距傳感器,激光雷達在測量精度、測量距離、角分辨率、抗干擾能力等方面具有巨大的綜合優勢。
01
背景概述
雷達(英文Radar的音譯,源于radio detection and ranging的縮寫),意思為"無線電探測和測距",發射電磁波對目標進行照射并接收其回波,由此獲得目標的距離、速度、方位、高度等信息。
傳統雷達以微波作為載波的雷達,大約出現在1935年
雷達按頻段可分為:超視距雷達、微波雷達、毫米波雷達以及激光雷達等
激光雷達即激光探測及測距系統LiDAR(Light Detection and Ranging),是一種通過發射激光束探測目標的位置、速度等特征量的雷達系統。
用激光器作為發射光源,采用光電探測技術手段的主動遙感設備。激光雷達是激光技術與現代光電探測技術結合的先進探測方式。由發射系統、接收系統 、信息處理等部分組成。
激光波的優異性能:
角分辨率和距離分辨率高
抗干擾能力強
能獲得目標多種圖像信息(深度、反射率等)
體積小,質量輕
探測反射率信息,這一點在做無人駕駛中的車道線信息識別非常重要
激光以波長短、準直性高的性能優勢,廣泛應用在測繪、氣象監測、安防、無人駕駛等領域。
激光雷達自1960年作為一種全新的測量工具發展至今,到三維掃描和無人駕駛上的應用,蘊含著巨大的商業價值。
02
激光雷達與微波雷達的異同:
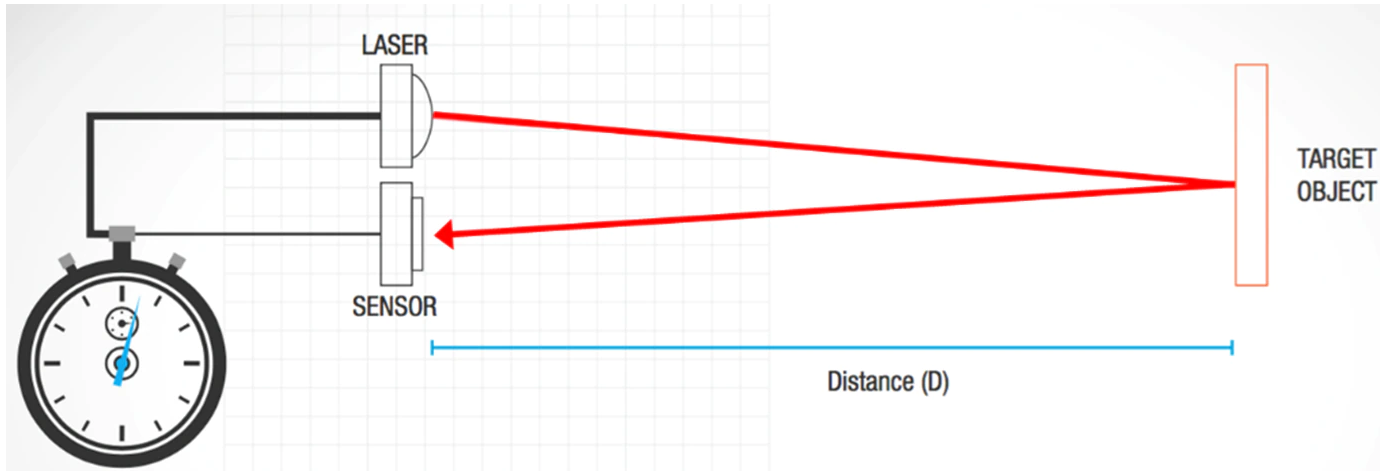
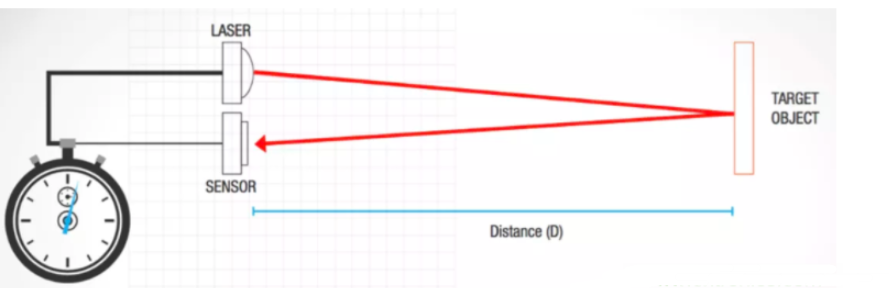
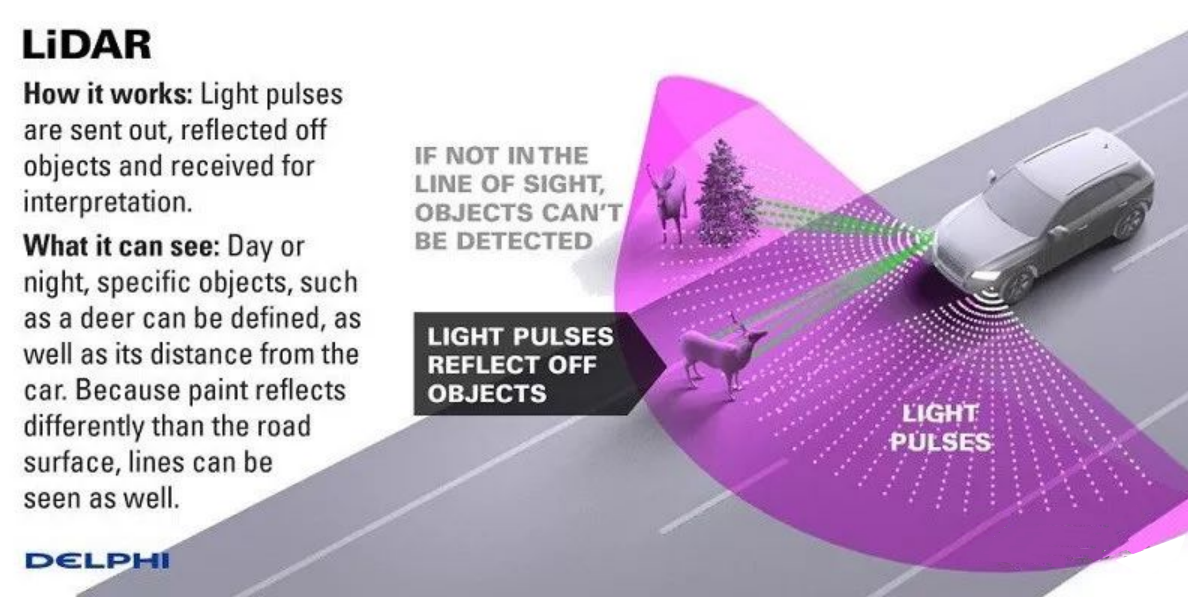
激光雷達工作原理:
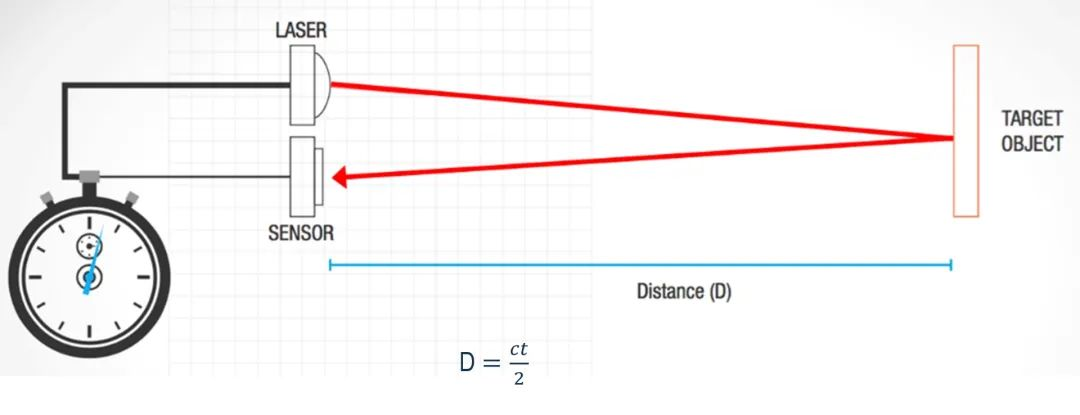
向被測目標發射探測信號(激光束),然后測量反射或發射信號的到達時間、強弱程度等參數,以確定目標的距離、方位、運動狀態及表面光學特性。
用飛行時間法(Time of flight method)測算出L:
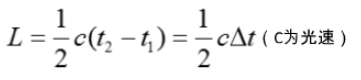
從公式可以看出精度取決于時間,所以對接收裝置的要求很高。如果做到1cm的精度,可以推出對時間的測量精度達到0.067ns。
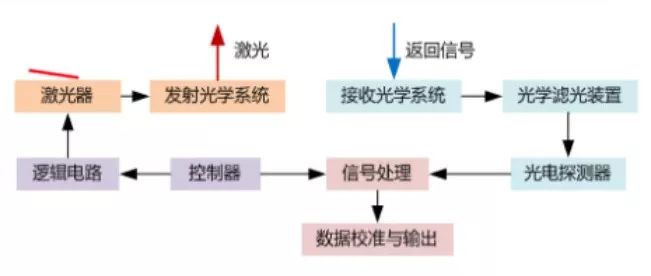
激光雷達系統組成:
發射單元,激光器、發射光學系統。發射激光束探測信號
接收單元,接收光學系統、光學慮光裝置、光電探測器。接收反射的激光信號,即回波信號
控制單元,控制器、邏輯電路。控制激光激發、信號接收及系統工作模式
信號處理單元,信號處理、數據校準與輸出。光電轉換,信號分析,數據獲取
激光雷達八大核心技術指標:
這些核心指標參數,其實就可以判斷一個傳感器是否滿足你的使用需求
最大輻射功率
第一重要的參數,首先看是否得到安全認證,是否需要做防護
水平視場
機械式雷達360度旋轉,水平全視角
垂直視場
一般16線俯仰角30度,從-15度到15度,應用最多、最廣泛
光源波長
光學參數,納米參數
最遠測量距離
是否滿足長距離探測
測量時間/幀頻率
雷達返回一圈的時間
縱向分辨率和水平分辨率
對算法影響大,精度越高價值越貴,滿足應用的情況下,選性價比高的
測距精度
厘米級已經滿足無人駕駛的應用場景
激光雷達分類:
03
關鍵技術
激光雷達融合激光、大氣光學、雷達、光機電一體化和信號處理等諸多領域技術,下面逐一介紹各關鍵技術
1.激光器技術
激光器是激光雷達的核心
激光器種類很多,性能各異,需要綜合考慮各種因素后加以選擇
考慮因素包括:波長、大氣傳輸特性、功率、光束截面、發散角、信號形式、平臺限制(體積、重量和功耗)、對人眼安全程度、可靠性、成本和技術成熟程度等
2.探測器及探測技術
探測器:能把光輻射轉換成一種便于測量(電壓或電流)的物理量器件。有如下關鍵參數
積分靈敏度:也稱為響應度,表示光電流與入射光功率的關系
光譜靈敏度:表征探測器的光譜選擇特性
頻率靈敏度:也稱響應頻率或響應時間
適合于激光雷達的光電探測器主要有PIN光電二極管、硅雪崩二極管(Si-APD)等
PIN光電二極管:頻帶寬(可達10GHz)、靈敏度高、線性輸出范圍寬、噪聲低
硅雪崩二極管(Si-APD):超低噪聲、高速(0.1nm)、高互阻抗增益,0.6-0.9μm
探測技術
直接探測(能量探測)
利用探測器的光電轉換功能直接實現對光信號的信息解調
優點:系統簡單
缺點:精度低、對噪聲敏感
相干探測(外差探測)
和直接探測相比,多了一路本振激光輸出,平衡探測器起到光混頻器的作用,它響應于信號光和本振光的差頻分量,輸出一個中頻光電流
優點:靈敏度高,精度高
缺點:系統復雜
3.光學系統設計技術
發射光學系統
激光二極管示意圖
各種激光器發射的激光束并不是絕對平行的,通常有幾個毫弧度(mrad)發散角,到達遠處時光斑直徑很大。
通過理想的透鏡系統,可以改變發射光束的發散度、波束寬度和截面積,總功率保持不變。
發射光學系統,也稱為發射光學天線,一般由準直鏡、擴束鏡(望遠鏡光學系統)和輔助光學系統組成。
準直鏡解決激光器準直輸出問題
擴束鏡解決進一步壓縮激光發散角問題
輔助光學系統解決激光束偏振太控制、光隔離等問題
需要根據激光器類型(如激光二極管、固體激光器、光纖激光器或氣體激光器)及其輸出參數二具體設計。
接收光學系統
也稱為接收光學天線。
為了盡可能地將目標發射回來的激光能量會聚到探測器上,而且適當限制接收接收視場,減小雜散光的干涉,提高接收機的靈敏度和信噪比。
對于遠距離探測,常采用望遠鏡加物鏡的結構設計或遠心成像光學系統。
4.激光傳輸技術
大氣消光特性
地球大氣由空氣分子以及固體和液體懸浮顆粒(也稱為氣溶膠)組成。
激光在傳輸過程中存在分子、氣溶膠的吸收和散射衰減效應。
分子吸收具有非常強的光譜選擇特性,其中水蒸氣、二氧化碳和臭氧是主要吸收分子
對于激光雷達來講,常用的位于大氣窗口的波長有~1.5μm,~1μm,0.85μm,和0.78μm波段
分子散射也稱為瑞利散射,它與大氣濃度和入射光波長相關
在近地大氣層常見以下幾種大氣光學狀態:煙霧雨雪等,需根據經驗公式推算激光衰減規律。
目標特性
向后角反射器
也稱為立方角錐棱鏡,實際上它是由3個鍍有反射膜且互相垂直的反射面構成的四面體,相當于是從一個立方體切下來的一個角
出射光與入射光平行,但方向相反,屬于合作目標,廣泛應用于月球和衛星的激光定位、宇宙飛船的對接系統及大地測量
朗伯目標
是指散射光強遵循朗伯余弦定律的表面,確切地說,從材料表面任何給定方向上反射的光強(單位立體角通量)正比于該方向與表面法線之間夾角的余弦
根據激光雷達截面積大小,分為點目標、大目標、擴展目標
氣溶膠和空間散射物
光學散射效應:拉曼散射、米散射、瑞利散射
雷達截面積與激光束穿透溶膠的傳輸損耗密切相關
5.成像掃描技術
機械旋轉
在定位方向(水平方向)采用機械360°旋轉掃描技術。
在俯仰方向(垂直于水平面方向)均采用了定向分布式掃描技術。
多線性,探測器與激光器一一對應
不同激光器發射光束經光學透鏡后成一定夾角出射
優點:單點測量精度高、抗干擾能力強、可承受高激光功率
缺點:垂直掃描角度固定、裝調工作量大
MEMS型
利用MEMS微振鏡(MEMS指的是微機電系統),把所有的機械部件集成到單個芯片,利用半導體工藝生產
優點:集成度高、體積小、損耗低
芯片級工藝,適合量產
缺點:高精度高頻振動控制難度大、制造精度要求高
無法實現360°掃描,需組合使用
光學相控陣(全固態)
其原理與相控陣雷達一樣,通過調節發射陣列中每個發射單元的相位差來改變激光的初設角度
優點
掃描速度快:一般可以達到MHz量級以上
掃描精度高:可以做到μrad(千分之一度)量級以上
可控性好:可以在感興趣的目標區域進行高密度的掃描,這對于自動駕駛環境感知非常有用
缺點
易形成旁瓣,影響光束作用距離和角分辨率,干涉效果易形成旁瓣,使得激光能量被分散
加工難度高:光學相控陣要求陣列單元尺寸必須不大于辦個波長
Flash型
傳統激光雷達是逐點掃描式,單次發射只探測某個方位
falsh型激光雷達單次探測可覆蓋視角內所有方位,一次性實現全局成像,故也稱為閃爍式激光雷達
使用探測器陣列探測返回信號
優點
無掃描器件,成像速度快
集成度高,體積小
芯片級工藝,適合量產
缺點
激光功率受限,探測距離近
抗干擾能力差
角分辨率低
無法實現360°成像
6.信號處理技術
接收信號噪聲種類
目標信號:由于目標反射在像平面上行成的信號(weak single)。
大氣后向散射信號:激光冒充在照射一定厚度傳播介質時所有其的向后散射干擾信號。
背景干擾信號:由于背景反射在像平面上所形成的信號。
太陽輻射:太陽輻射照射 在目標或傳播介質后所反射的信號。
7.數據校準技術
輸出點云中每個點包含4個物理量:X、Y、Z、Intensity
XYZ:方位信息,Intensity:反映物體反射特性,藍→紅表示物體反射率→高
同一種材料的物體呈現接近的顏色,豐富Intensity信息有助于判斷周圍環境,比如車道線
難題:相同表面特性的物體假設為漫反射其反光功率也隨著距離的平方而線性衰減,如何保證同一類物體點云中呈現的Intensity保持一致?
Intensity校準技術
探測距離增加導致的誤差具體來源于兩個方面
返回至激光雷達的反射光功率隨著距離的平方而線性衰減
返回至激光雷達的反射光經接收透鏡成像在單點探測器的位置和距離有關
(像點與探測器錯位會引起響應度下降)
校準方案需要圍繞上述兩個誤差源進行
04
應用領域
應用領域
激光雷達因為其性能優勢,在無人駕駛、地圖測繪、無人機、機器人、安防、氣象監測領域有著廣泛的應用
市場趨勢
無人駕駛
激光雷達是無人駕駛汽車的關鍵核心部件之一,有效提供車輛決策與控制系統所需的高精度地圖和定位避障功能,具有不可替代的作用
激光雷達的應用環節(點云處理之前)
驅動
外參指標
時間同步
多雷達融合
與其它傳感器的融合(相機、IMU、Radar等)
總結
相對于傳統測距傳感器,激光雷達在測量精度、測量距離、角分辨率、抗干擾能力等方面具有巨大的綜合優勢。
激光雷達技術難點集中在光學系統設計、成像掃描、控制系統、多線單元裝調、信號/數據校準等環節。
作為無人駕駛系統的關鍵組件,激光雷達發展方向將是細分化,適用不同場景做到最高性價比,固態和機械式都將依靠各自的優勢占據自己的市場。
-
無人駕駛
+關注
關注
98文章
4054瀏覽量
120448 -
LIDAR
+關注
關注
10文章
326瀏覽量
29414
原文標題:LiDAR技術介紹
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
淺談SiPM 傳感器在汽車 LiDAR的應用
LiDAR如何構建3D點云?如何利用LiDAR提供深度信息
什么是LiDAR?LiDAR的工作原理
速騰聚創首次發布LiDAR算法 六大模塊助力自動駕駛
LIDAR與RADAR在自動駕駛汽車中的比較
如何選擇汽車LiDAR的激光器和光電探測器
實現“三重視野” – LiDAR技術實現安全駕駛
德國Sick推出基于LiDAR的自由行駛車輛分析系統
LeddarTech和ST合作開發基于LeddarEngine技術的LiDAR解決方案
LiDAR已成為支持自動駕駛轉變的最受討論技術之一
LiDAR激光雷達技術原理及Arduino示例代碼糾錯
基于LiDAR的行人重識別的研究分析






 工商網監
工商網監
評論