 汽車之間的自主無線通信可如何取代交通信號燈,縮短通勤時間
汽車之間的自主無線通信可如何取代交通信號燈,縮短通勤時間
生命短暫,而當你身陷交通堵塞,或者在完全無車的路口等紅燈時,人生似乎更顯苦短。在墨西哥城、圣保羅、羅馬、莫斯科、北京、開羅或內羅畢這樣的城市,住在城市遠郊的居民早晨的通勤時間可能會超過兩小時。如果下班的通勤時間也算進去的話,每天花3到4個小時在路上是很正常的。
現在假設有這樣一個系統,可以將每天上下班的通勤時間減少1/3,比方說從3小時降低到2小時,那么每個月就可以節約22個小時,按照35年的職業生涯來算,共可節約3年時間。
飽受困擾的通勤者們,振作起來,因為目前已經有人設計出這樣一個系統,使用了幾項新興技術。其中一項技術便是車輛無線連接技術,也經常被稱為車對車(V2V)技術,不過無線連接還可以包括路標和其他基礎設施。另一項新興技術是無人駕駛汽車技術,這項技術就其本質而言應該會減少通勤時間(同時讓通勤時間更有效率)。再就是物聯網技術,它不僅將連接全球70億人口,還會連接另外300億個傳感器和裝置。
我與卡耐基?梅隆大學(位于匹茲堡)的同事們共同研究了一種算法,可以將這些技術結合起來。我們的算法使用車載通信功能,讓汽車彼此進行協作,在不依靠任何交通信號燈的情況下保持交通安全暢通。我們把這個項目分拆出來,形成一家公司,即虛擬交通信號燈(VTL)公司,并進行了大量模擬測試。接著自2017年5月起,我們開始在卡耐基?梅隆大學校園附近的道路上進行封閉測試。7月份,我們在沙特阿拉伯首次公開展示了VTL技術,現場大約有100名觀眾,主要是科學家、政府官員以及私營企業代表。
那次試驗的結果證明我們長期以來的懷疑是有道理的:是時候淘汰交通信號燈了。我們不必再困在車里耗費數不清的時間卻哪兒也去不了,也不會有任何損失。

●●●
1912年,交通信號燈被發明并開始在鹽湖城應用,兩年后推廣到了克利夫蘭。而其原理從那時到現在幾乎從未改變過。交通信號燈采用基于計時器的方法工作,因此有時你周圍明明沒有車輛卻還是要在路口等紅燈。時間設置可以調整,以匹配不同通勤時段的交通模式,但這差不多是唯一能做出的微調,這還遠遠不夠。很多人都為此浪費了大量時間,并且天天如此。
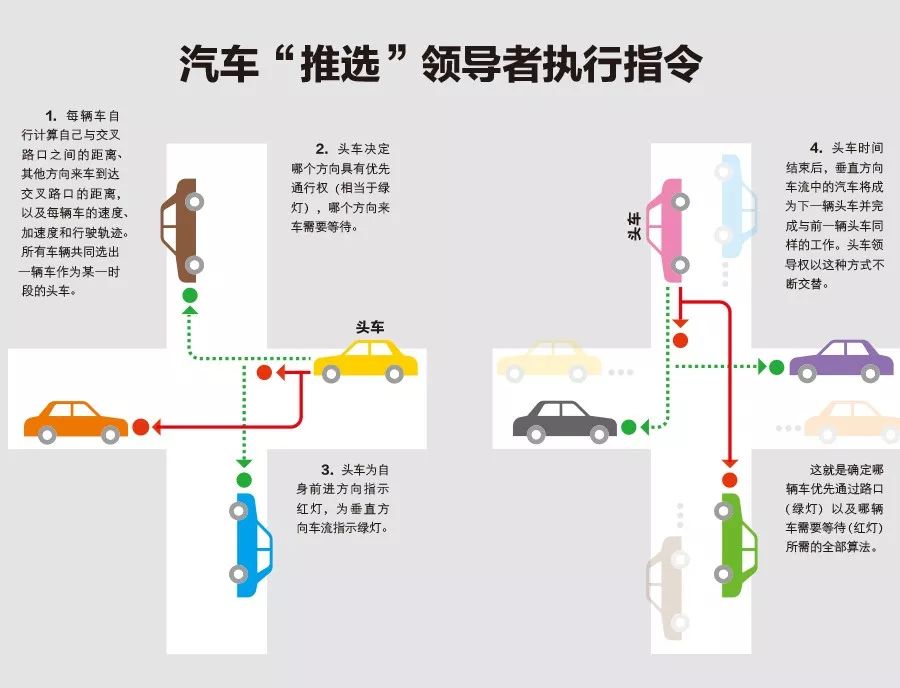
而現在請想象有很多車輛正駛向某個路口,這些車正通過V2V技術進行交流。它們就好像投票一樣,選出一輛頭車。在接下來的一段時間里,由這輛頭車決定哪個方向具有優先通行權(相當于綠燈),哪個方向需要等待。
到底哪個方向優先通行呢?原理很簡單,且大家都會遵守。頭車指示自己前行的方向為紅燈,指示垂直方向的車流通行。大概30秒后,垂直方向車流中的某輛車成為頭車,再完成與前一輛頭車相同的工作。領導權以循環方式不斷移交,公平分配責任與義務,因為頭車需要為了共同的利益而暫時犧牲自己的利益。
使用這種方法后就再也不需要交通信號燈了。交通監管以無形的方式與無線通信設施相融合。人們再也不需要在沒有車輛的路口等紅燈。
我們公司開發的VTL算法通過參考諸多參數選出頭車,比如各個方向來車中位置靠前的車輛與路口中心的距離、車輛的速度、各個方向來車的數量等等。當其他條件相同時,算法選擇距離路口最遠的車輛作為頭車,這樣該車輛將有充足的時間減速。這一策略確保了距離路口最近的車輛有優先通行權,即作為虛擬綠燈信號。
值得引起注意的是,VTL技術并不需要攝像機、雷達或激光定位器,它的所有定位導航功能都是通過名為專用短程通信(DSRC)的無線系統獲得的。DSRC指的是1999至2008年期間美國、歐洲和日本研發的無線電管理方案,包括專用帶寬,用于讓臨近車輛進行無線信息交流。DSRC開發者們預想過這一方案的多種用途,包括電子收費裝置、合作式自適應巡航控制,以及我們目前正在使用的功能——預防路口碰撞。
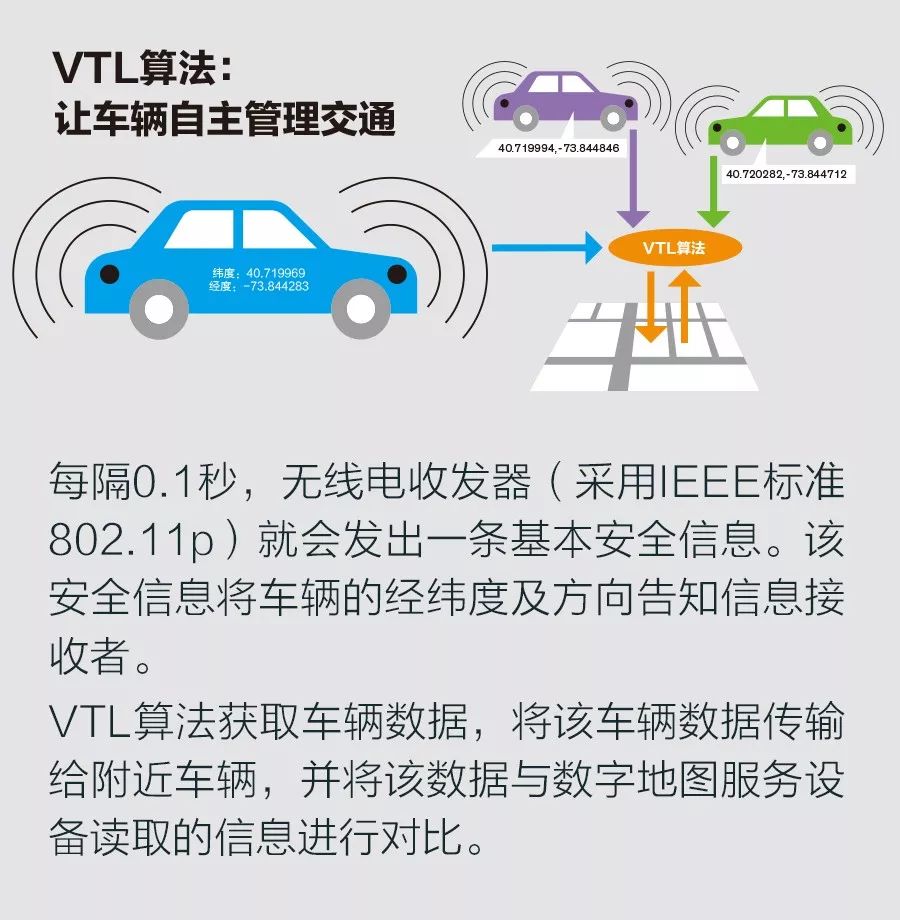
目前,量產車很少配備DSRC收發器(并且DSRC很可能被新興的5G無線技術替代)。但是DSRC收發器現成可用,并且具備我們所需的所有功能。這些應用IEEE標準802.11p的收發器必須每隔0.1秒就發送1條基本安全信息。該安全信息將信息發出車輛的經緯度及方向告知信息接收者。VTL算法在車輛的處理器上運行,可以獲取該車輛的數據,接收從臨近車輛獲取的信息,然后將結果與數字地圖(比如谷歌地圖、蘋果地圖或公開街區地圖)服務提供的數據進行疊加。通過這種方式,每輛車都能計算自己與路口之間的距離,其他方向來車與路口之間的距離,以及及每輛車的速度、加速度和行駛軌跡。這就是確定哪些車輛可以通行(綠燈)、哪些車輛需要等待(紅燈)所需的所有算法。一旦做出決定,每輛車內的平視顯示器將以正常視角向司機展示紅燈或綠燈信號。當然,VTL算法僅解決了交叉路口、停車標志以及讓行標志處的交通管理問題。VTL算法并不能控制車輛駕駛。但在用于合適的領域時,無人駕駛技術能做的,VTL都可以實現,且成本更低。無人駕駛汽車需要更多計算能力處理激光定位器、雷達、攝像機以及其他傳感器的饋送信息,還需要將這些數據融合形成周圍環境的單一視圖。
我們的方法可以看成是用一種經驗法則代替真實智能。VTL算法讓汽車自主控制交通,就像昆蟲群和魚群一樣:魚群會一下子全部轉換方向,而不需要任何頭領來指引;在魚群中,每條魚會根據臨近魚的動向來獲得提示。
這是一種與集中式網絡行為完全相反的分散式系統行為。據此,城市中的車流能夠自行控制交通,無須依賴集中式控制機制或人為干預,不需要警察、交通信號燈、停車標志以及讓行標志。
●●●
智能路口這個概念并不是我們創造的,它在幾十年前就已經存在了。早期的一個想法是在瀝青馬路下面安裝磁線圈,檢測一條路上駛向路口的車輛并相應地調整綠燈和紅燈的時長。與此類似的是,路口設置的攝像機可以計算出各個方向的車輛數量,然后計算出每個路口交通信號燈的最佳時長。但這兩項技術的安裝與維修成本都很高,因此只有少數交叉路口安裝了它們。
最初,我們在兩個城市的虛擬模型上運行VTL算法:兩個城市分別為美國匹茲堡和葡萄牙波爾圖。我們從美國人口調查局以及葡萄牙相關機構獲取交通數據,然后添加谷歌地圖的數據;隨后,將數據輸入德國宇航中心開發的開源軟件包——城市交通仿真(SUMO)。
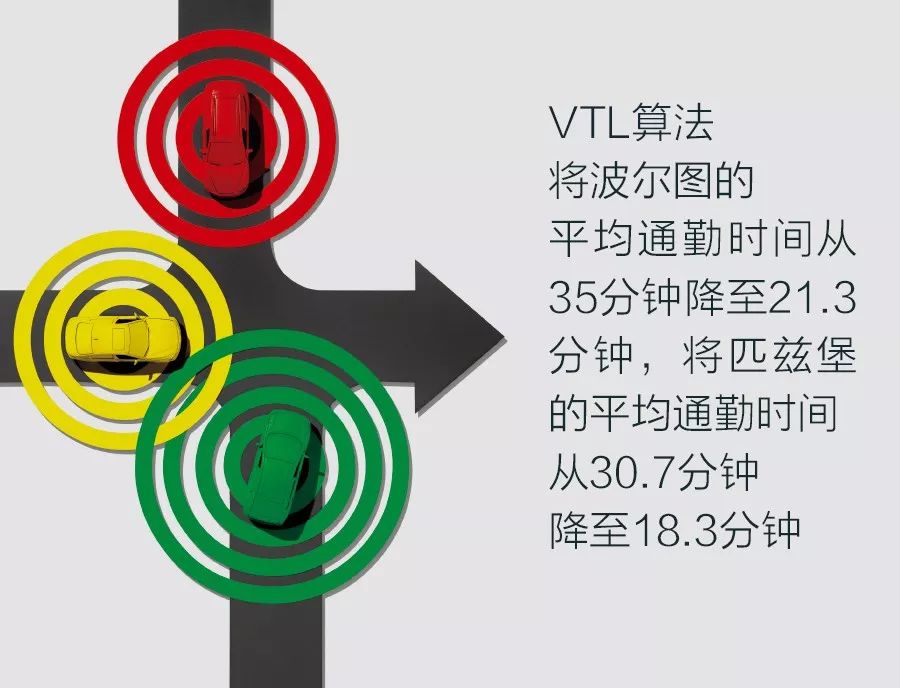
SUMO對兩種情境下的通勤高峰時段進行了模擬。一種情境應用現有交通信號燈,另一種情境應用我們開發的算法。結果發現,VTL算法將波爾圖的平均通勤時間從35分鐘降至21.3分鐘,將匹茲堡的平均通勤時間從30.7分鐘降至18.3分鐘。從郊區以及更遠的地區到達市內的通勤時間減少了30%到60%。重要的是,通勤時間的方差(某個點偏離平均值的統計值)也減小了。
時間的節約主要得益于兩個原因。其一,VTL消除了沒有垂直方向來車情況下在路口等待紅燈的時間。其二,VTL引導的是每個路口的交通秩序,而不僅限于有信號燈的路口。因此,如果周圍沒有其他車輛,車輛不必在停車標志前停車。
通過模擬試驗,我們還發現了比節省時間更重要的其他優點。交通事故發生率降低了70%。這不奇怪,事故發生率降低的主要區域集中于路口、停車標志以及立交橋附近。此外,通過盡可能減少在路口的等待、加速和減速,VTL顯著減少了車的平均碳排放量。
那么,如何將VTL技術從實驗室推廣到全世界呢?首先,我們必須在量產車上安裝DSRC。2014年美國國家公路交通安全管理局建議采用DSRC技術。但是特朗普政府尚未實施這項規定,并且最后決定如何尚不可知。因此,美國的汽車生產商現在并不愿意安裝DSRC收發器,畢竟這會增加成本。而且這項技術需要在其他車輛也安裝的情況下才有用。又是熟悉的“雞生蛋還是蛋生雞”問題。在足夠多的汽車安裝DSRC之前,DSRC的生產規模將一直很低,而且單位成本很高。在美國,只有通用汽車公司已經開始在車上安裝DSRC,而且都是高端車型凱迪拉克。DSRC在歐洲和日本的前景似乎更樂觀。相當一部分歐洲汽車制造商已經承諾要在量產車上安裝收發器。日本政府十分支持這項技術,今年年初,豐田汽車也反復承諾安裝收發器。
即使DSRC技術最終失敗,VTL算法依然可以通過其他無線技術運行,比如5G或者Wi-Fi。
DSRC 收發器的不完全普及是VTL技術應用的最大潛在障礙之一。如果只有一部分汽車安裝DSRC,VTL技術還能起作用嗎?答案是肯定的,前提是政府能為現有交通信號燈安裝DSRC。
只要不拆除現有價值數10億美元的交通信號基礎設施,政府是樂于安裝DSRC的。為了解決這一問題,我們提出了一個短期VTL技術方案:對現有交通信號燈進行升級,以便其能夠檢測到各方向駛來的安裝有DSRC的車輛,并確定相應信號燈時長。這個方案的妙處在于,無論是否安裝DSRC,所有車輛都能利用同樣的道路和路口。根據模擬試驗及在匹茲堡的實地測試,雖然此方案相比于理想的VTL方案節省的通勤時間要少,但也比現行交通控制系統快23%。

另一挑戰是處理好行人及自行車的問題。即使政府強制所有汽車、卡車安裝DSRC,我們也不能讓自行車或行人攜帶DSRC。這樣可能會不便于行人及自行車安全穿過路口。
根據短期解決方案,物理信號燈仍與VTL系統并存,以便為行人提供一種獲取路權的方法。從今年1月份起,我們在匹茲堡的試驗項目在交叉路口的4個方向設置了按鈕,按下按鈕即可開啟紅色信號燈(對于行人是真實紅燈,對于汽車是虛擬紅燈)。這一設置每次都能有效運行。
長期來看,物聯網技術也許會解決自行車出行者和行人的問題。隨著物聯網技術的發展,總有一天,人人出門都會隨身攜帶一個DSRC支持設備。
與此同時,在沒有物理信號燈的理想情況下,我們已演示過,投票分配路權的車輛可將信號周期的一部分時間分配給行人。在這個時段內,向路口4個方向的車輛指示虛擬紅色燈信號,信號燈時長足以讓所有行人安全穿過路口。這個初步的解決方案對于交通流量來說并不是最理想的,因此我們在研究一種方法,利用安裝在儀表盤上的廉價攝像頭來識別行人,并讓其優先通行。
●●●
最終,無人駕駛汽車的出現將為虛擬交通信號燈帶來新的前景。按照現在的設想,人類駕駛員可以做到的,無人駕駛汽車都可以做到,比如遇到信號燈停車、遇到讓行標志禮讓,等等。但為何不對交通設施進行全自動化呢?讓無人駕駛汽車完全自動化,不用傳統標志或信號來管理交通,效果會好得多。實現這一目標的關鍵在于V2V以及車輛與基礎設施之間的通信。
這點很重要,因為目前在進入或駛離繁忙的路口時,無人駕駛汽車經常無法協商通行。這是最棘手的技術難題之一,行業領跑者Waymo公司仍對其束手無策(Waymo是谷歌母公司Alphabet的另一子公司)。
在模擬和實地測試中,我們發現應用VTL技術的無人駕駛車輛可以應對沒有交通信號燈或指示的路口。車輛無須辨認實體標志,這大大簡化了當下無人駕駛車輛所依賴的計算機視覺算法以及運行此類算法的計算機硬件。這些軟件和硬件以及傳感器(尤其是激光雷達)構成了系統中最昂貴的部分。
VTL很大程度上是一個模塊化的軟件體系結構,因此很容易與無人駕駛車輛的軟件集成。此外,VTL可以解決大部分與計算機視覺相關的難題。比如,陽光直射攝像機鏡頭,雨天、雪天、沙塵暴天氣或者遇到彎路時阻擋視線的情況。要明確一點,VTL并不是無人駕駛技術的競爭者,而是后者的補充與完善。單憑這一點就可以助推無人駕駛車輛的發展。
但在那之前,我們希望VTL現在能應用于有人駕駛車輛。今年7月份,在沙特阿拉伯的利雅得,當時室外溫度超過43攝氏度,我們將設備安裝在試驗車輛中,進行了此項技術的首次公開展示。來自政府、科研機構以及企業(包括優步)的代表乘坐奔馳客車,進入阿卜杜勒阿齊茲國王科技城的園區,穿過3個路口,其中2個沒有交通信號燈。奔馳的客車、通用的卡車、現代的SUV以及雪鐵龍的小汽車由各個方向駛向路口,這次試驗證明VTL系統每次都能有效運行。當一位司機故意違反虛擬紅燈指示,企圖搶過路口時,我們的安全功能立刻啟動,向路口的4個方向閃爍紅燈信號,避免了事故的發生。
我希望,同時也相信,這將成為交通運輸的轉折點。交通信號燈已經過時,它們已經堅守了100年。現在是時候向前發展了。
-
收發器
+關注
關注
10文章
3424瀏覽量
105961 -
無線連接
+關注
關注
2文章
423瀏覽量
35872 -
無人駕駛
+關注
關注
98文章
4054瀏覽量
120447
原文標題:汽車之間的自主無線通信可如何取代交通信號燈,縮短通勤時間
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

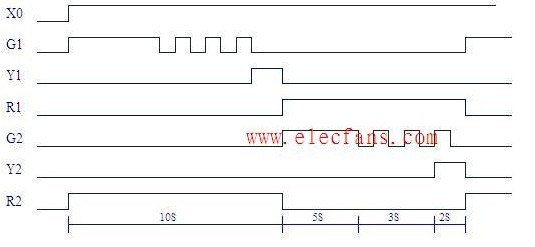
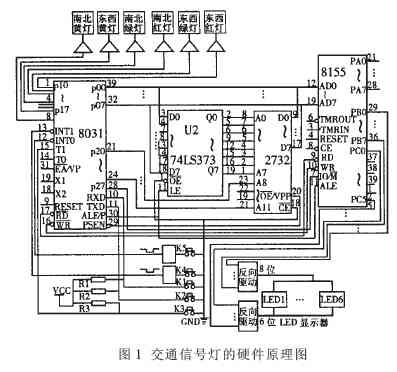
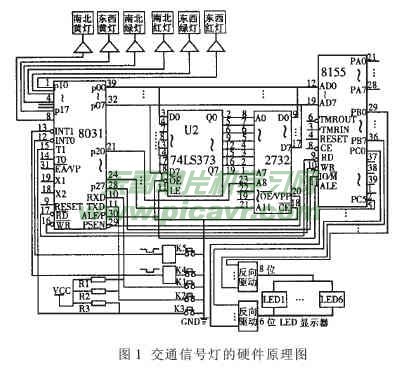
交通信號燈的硬件原理圖
多路交通信號燈狀態監測系統

傳統交通信號燈與LED交通信號燈的光學設計方法







 工商網監
工商網監
評論