") 開(kāi)發(fā)自動(dòng)駕駛汽車(chē)時(shí)的雷達(dá)選用原則
開(kāi)發(fā)自動(dòng)駕駛汽車(chē)時(shí)的雷達(dá)選用原則
自動(dòng)駕駛汽車(chē)開(kāi)發(fā)中,激光雷達(dá)理應(yīng)是不能少的器件。但是車(chē)規(guī)的激光雷達(dá),外國(guó)品牌在15萬(wàn)元的價(jià)位,國(guó)產(chǎn)也在5萬(wàn)的價(jià)位上。業(yè)內(nèi)人士一看,就知道,如果激光雷達(dá),成本不下降到1萬(wàn)以下,中國(guó)自動(dòng)駕駛汽車(chē)要上市是不可能的。目前的產(chǎn)品基本上是,研究層面的事情,離上市還遠(yuǎn)得很。好在國(guó)內(nèi)激光雷達(dá)生產(chǎn)廠家越來(lái)越多,水平越來(lái)越高,成本下降的空間也是越來(lái)越大。整車(chē)廠自動(dòng)駕駛汽車(chē)開(kāi)發(fā)工程師,對(duì)激光雷達(dá),做深入了解的要求也是越來(lái)越高。下面做系統(tǒng)介紹,供同行參考。
一、對(duì)激光雷達(dá)的認(rèn)識(shí)
普通人對(duì)雷達(dá)的認(rèn)識(shí)基本上源于電影的畫(huà)面(圖1),雷達(dá)可以發(fā)現(xiàn)敵人飛機(jī)。
有一個(gè)指針,在屏幕上做360度的旋轉(zhuǎn),再就聽(tīng)到了中國(guó)人民解放軍的工作人員在報(bào)告首長(zhǎng),在什么方位上,發(fā)現(xiàn)了敵人的飛機(jī)而已。其工作原理?電影沒(méi)有解釋?zhuān)o人基本知識(shí)是,人用肉眼,看不見(jiàn)飛機(jī)的時(shí)候,用雷達(dá),可以看到飛機(jī)的行蹤。自動(dòng)駕駛汽車(chē)開(kāi)發(fā)中,要用到雷達(dá),是近幾年的事情。汽車(chē)為什么要用雷達(dá)?其功能是什么?如何用雷達(dá)?尤其是自動(dòng)駕駛汽車(chē)開(kāi)發(fā)的相關(guān)工程師,都想了解和學(xué)習(xí)。
一、雷達(dá)工作原理、功能、分類(lèi)
雷達(dá)是通過(guò)發(fā)射和接受無(wú)線電波,來(lái)實(shí)現(xiàn)對(duì)目標(biāo)的探測(cè),現(xiàn)代雷達(dá)可以同時(shí)探測(cè)目標(biāo)的距離、方位、高度、速度、形狀和目標(biāo)類(lèi)型等。
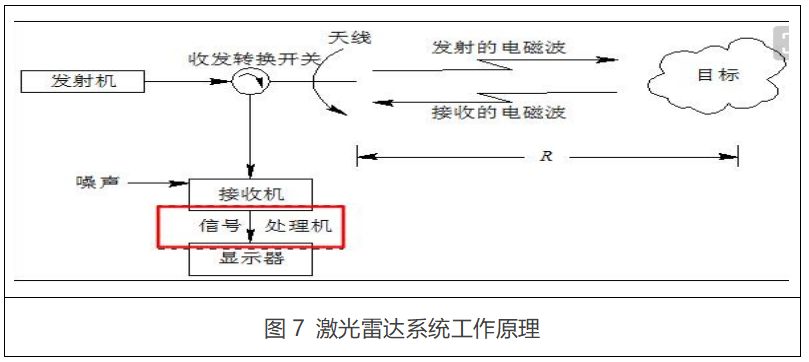
(1)工作原理
①雷達(dá)設(shè)備的發(fā)射機(jī),通過(guò)天線把電磁波能量射向空間某一方向(圖2),處在此方向上的物體反射碰到的電磁波;
②雷達(dá)天線接收此反射波,送至接收設(shè)備進(jìn)行處理,提取有關(guān)該物體的某些特征信息(如:目標(biāo)物體至雷達(dá)的距離,距離變化率或徑向速度、方位、高度等)。
具體應(yīng)用:
①測(cè)量距離,是在測(cè)量發(fā)射脈沖與回波脈沖之間的時(shí)間差,電磁波以光速傳播,據(jù)此就能換算成目標(biāo)的精確距離;
②測(cè)量目標(biāo)方位,是利用天線的尖銳方位波束測(cè)量技術(shù),測(cè)量仰角靠窄的仰角波束,根據(jù)仰角和距離就能計(jì)算出目標(biāo)高度;
③測(cè)量速度,利用相對(duì)運(yùn)動(dòng)產(chǎn)生的頻率多普勒效應(yīng)原理。雷達(dá)接收到的目標(biāo)回波頻率與雷達(dá)發(fā)射頻率不同,兩者的差值稱(chēng)為多普勒頻率。
(2)雷達(dá)基本功能
雷達(dá)基本功能,相似人的眼睛和耳朵。物理學(xué)告訴大家,不論是可見(jiàn)光或是無(wú)線電波,在本質(zhì)上是同一種東西,都是電磁波。在真空中傳播的速度都是光速(c),差別在于它們各自的頻率和波長(zhǎng)不同。中學(xué)物理學(xué)知識(shí)告訴人們,真空光速定義值:c0=299792458m/s((一般取300000km/s即每秒30萬(wàn)公里)。
可以這樣理解,雷達(dá)用到汽車(chē)上,可以測(cè)量汽車(chē)之間相對(duì)速度、距離;可以測(cè)量汽車(chē)與障礙物之間距離;可以測(cè)量障礙物輪廓尺寸等。
(3)雷達(dá)的種類(lèi)繁多,分類(lèi)方法也非常復(fù)雜
①按照雷達(dá)信號(hào)形式分類(lèi),有脈沖雷達(dá)、連續(xù)波雷達(dá)、脈部壓縮雷達(dá)和頻率捷變雷達(dá)等;
②按照角跟蹤方式分類(lèi),有單脈沖雷達(dá)、圓錐掃描雷達(dá)和隱蔽圓錐掃描雷達(dá)等。
③按照目標(biāo)測(cè)量的參數(shù)分類(lèi),有測(cè)高雷達(dá)、二坐標(biāo)雷達(dá)、三坐標(biāo)雷達(dá)等;
④按照雷達(dá)采用的技術(shù)和信號(hào)處理的方式,有相參積累和非相參積累、動(dòng)目標(biāo)顯示、動(dòng)目標(biāo)檢測(cè)、脈沖多普勒雷達(dá)、合成孔徑雷達(dá)、邊掃描邊跟蹤雷達(dá);
⑤按照天線掃描方式分類(lèi)分類(lèi),分為機(jī)械掃描雷達(dá)、相控陣?yán)走_(dá)等;
⑥按雷達(dá)頻段分,可分為超視距雷達(dá)、微波雷達(dá)、毫米波雷達(dá)以及激光雷達(dá)等。
二、自動(dòng)駕駛汽車(chē)開(kāi)發(fā)中雷達(dá)選用原則
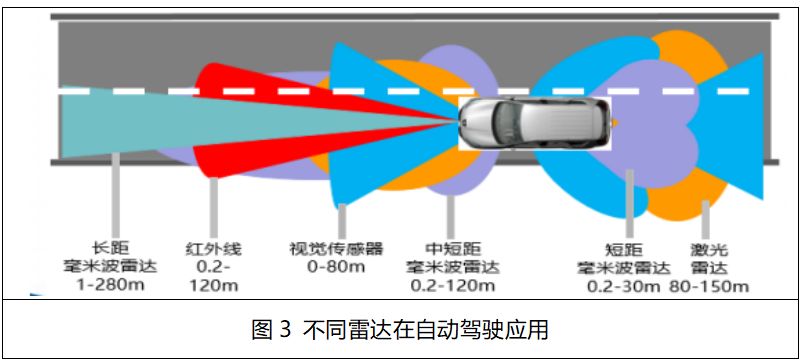
自動(dòng)駕駛汽車(chē)開(kāi)發(fā)中,必須要用到雷達(dá)(見(jiàn)圖3),不用多說(shuō)了;或者說(shuō),沒(méi)有雷達(dá)技術(shù)的支持,就沒(méi)有自動(dòng)駕駛汽車(chē)的出現(xiàn)。人們要問(wèn)的是,如何選用雷達(dá)?
1)必須選用車(chē)規(guī)級(jí)雷達(dá)
雷達(dá)產(chǎn)品分類(lèi)十分復(fù)雜,從自動(dòng)駕駛汽車(chē)開(kāi)發(fā)的出發(fā)點(diǎn)來(lái)說(shuō),一般是按雷達(dá)頻段分,可分為超視距雷達(dá)、微波雷達(dá)、毫米波雷達(dá)以及激光雷達(dá)等。但是從產(chǎn)品質(zhì)量來(lái)說(shuō),這些雷達(dá)必須是車(chē)規(guī)級(jí)的。通俗地理解,雷達(dá)要符合汽車(chē)車(chē)用標(biāo)準(zhǔn)的,低了,滿足不了汽車(chē)使用環(huán)境,其生命周期比較短;高了,成本也高,汽車(chē)用不了。
2)雷達(dá)用在汽車(chē)什么場(chǎng)景,要實(shí)現(xiàn)什么能?
(1)泊車(chē)系統(tǒng)中,超聲波雷達(dá)。
①原理:
超聲波雷達(dá),是利用傳感器內(nèi)的超聲波發(fā)生器產(chǎn)生40KHz的超聲波,再由接收探頭,接收經(jīng)障礙物反射回來(lái)的超聲波。根據(jù)超聲波反射接收的時(shí)間差,來(lái)計(jì)算與障礙物之間的距離。
②優(yōu)勢(shì):
超聲波雷達(dá)成本較低(單價(jià):100元左右),探測(cè)距離近,精度高,且不受光線條件的影響。
③實(shí)例:
寶馬的i系列和7系列,已經(jīng)支持使用車(chē)鑰匙,遙控汽車(chē)自動(dòng)泊車(chē)。在操作過(guò)程中,用戶只需要發(fā)出前進(jìn)或后退兩個(gè)指示,汽車(chē)就會(huì)持續(xù)使用超聲波傳感器檢測(cè)車(chē)位和障礙物,自動(dòng)操作方向盤(pán)和制動(dòng)器,實(shí)現(xiàn)自動(dòng)泊車(chē)。
④圖例:

(2)ADAS系統(tǒng)中毫米波雷達(dá)
①原理:
毫米波,毫米波的波長(zhǎng)介于厘米波和光波之間,波長(zhǎng)在1mm到10mm之間的電磁波,換算成頻率后,毫米波的頻率位于30GHz到300GHz之間。毫米波雷達(dá)系統(tǒng),主要包括天線、收發(fā)模塊、信號(hào)處理模塊,其中芯片、天線、PCB板是毫米波雷達(dá)的硬件核心。
②優(yōu)勢(shì):
毫米波兼有微波制導(dǎo)和光電制導(dǎo)的優(yōu)點(diǎn)。近些年,隨著毫米波雷達(dá)技術(shù)水平的提升和成本的下降,毫米波雷達(dá)(見(jiàn)圖4)開(kāi)始應(yīng)用于汽車(chē)領(lǐng)域。
③實(shí)例:
④圖例:
(3)L4級(jí)別以上自動(dòng)駕駛車(chē)輛激光雷達(dá)
①原理:
②優(yōu)勢(shì):
a)激光直線傳播、方向性好、光束非常窄,彌散性非常低;
b)其角分辨率不低于0.1mard,也就是說(shuō)可以分辨3km距離上相距0.3m的兩個(gè)目標(biāo),距離分辨率可達(dá)0.1m;速度分辨率能達(dá)到10m/s以內(nèi);
c)自然界中,能對(duì)激光雷達(dá)起干擾作用的信號(hào)源不多,抗有源干擾能力強(qiáng)。
③實(shí)例:
激光雷達(dá),因其在測(cè)距測(cè)速、三維建模等領(lǐng)域的優(yōu)越性,L4級(jí)別以上自動(dòng)駕駛車(chē)輛,是必選件。
④圖例:
有了激光雷達(dá),可實(shí)現(xiàn)車(chē)輛前向間距預(yù)警、車(chē)輛雙側(cè)間距預(yù)警、車(chē)輛轉(zhuǎn)向盲區(qū)預(yù)警、車(chē)輛車(chē)道偏離預(yù)警等功能。
3)不同車(chē)輛幾何尺寸不同,要與雷達(dá)幾何大小配合好
①一維激光雷達(dá),主要用于測(cè)距測(cè)速等,一般安裝在車(chē)內(nèi)、風(fēng)擋玻璃前面,后者安全后視鏡上;
②二維激光雷達(dá),主要用于輪廓測(cè)量、物體識(shí)別、區(qū)域監(jiān)控等,一般安裝在車(chē)外面的前頭;
③三維激光掃描儀、三維激光雷達(dá),實(shí)時(shí)三維空間建模,一般安裝在車(chē)頂;
激光雷達(dá)還可以測(cè)量出周邊其他車(chē)輛在三個(gè)方向上的距離、速度、加速度、角速度等信息,再結(jié)合GPS地圖計(jì)算出車(chē)輛的位置。
4)雷達(dá)有一定幾何尺寸及性能指標(biāo),要認(rèn)真了解和驗(yàn)證
①國(guó)產(chǎn)的16 通道激光雷達(dá)跨阻放大器 LS1716M 芯片
②其參數(shù)如下:
電源電壓:3.3V;·輸入 :APD 管的 N 極與輸入相連,P 極接負(fù)壓,16 通道跨阻放大器;單端輸入,單端輸出;·四種可編程跨阻放大器增益模式:86dBΩ / 80dBΩ / 74dBΩ / 68dBΩ;接收器帶寬> 200MHz·可接受最小激光脈沖半寬度:3.5ns;·單通道功耗< 70mW;·可選通輸出,通道切換時(shí)間<100ns;·輸出阻抗:50Ω; ·LQFP80L 封裝。
③激光雷達(dá)必須要廠家軟件支持。目前國(guó)產(chǎn)品牌激光雷達(dá),配有相應(yīng)軟件,培訓(xùn)和服務(wù)基本到位。
③性價(jià)比比較高的國(guó)產(chǎn)激光雷達(dá)
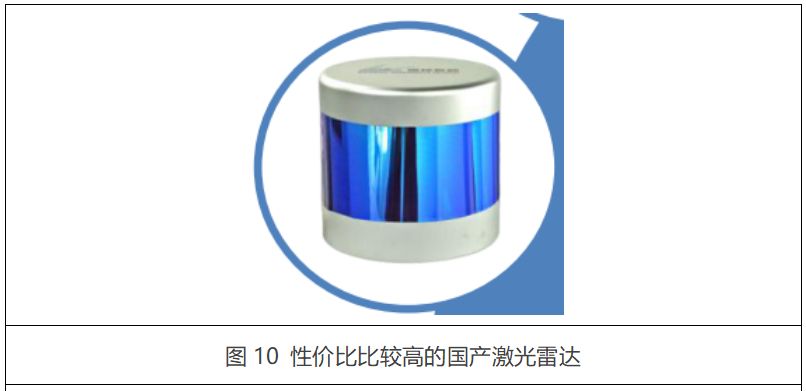
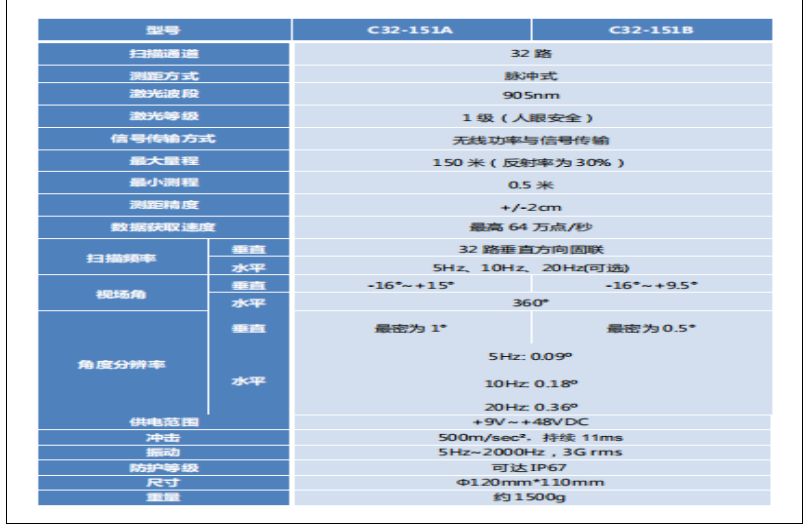
圖11 國(guó)產(chǎn)激光雷達(dá)參數(shù)
32 線激光雷達(dá)能夠?qū)χ車(chē)h(huán)境進(jìn)行三維掃描探測(cè)。此系列產(chǎn)品應(yīng)用廣泛,可應(yīng)用于汽車(chē)輔助駕駛(ADAS)、無(wú)人駕駛汽車(chē)。其特點(diǎn)是, 實(shí)時(shí)、360°、三維坐標(biāo)和距離等,性價(jià)比優(yōu)異。
三、總結(jié)
1)自動(dòng)駕駛汽車(chē)的最高級(jí)別是無(wú)人駕駛。借用雷達(dá)選用情況,可以基本劃分出自動(dòng)駕駛級(jí)別來(lái),
2)沒(méi)有配有雷達(dá)的,一定是人工駕駛汽車(chē);
3)配有超聲波雷達(dá)的,可以歸類(lèi)輔助駕駛汽車(chē)了;
4)配有超聲波雷達(dá)、毫米波雷達(dá)的,可以歸類(lèi)L3類(lèi)自動(dòng)駕駛汽車(chē);
5)配有超聲波雷達(dá)、毫米波雷達(dá)的,激光雷達(dá),可以歸類(lèi)L3、L4
類(lèi)自動(dòng)駕駛汽車(chē);
要注意,雷達(dá)是一個(gè)系統(tǒng),不僅有硬件、軟件,還必須對(duì)外有接口,開(kāi)發(fā)過(guò)程工程師,一定對(duì)雷達(dá)系統(tǒng)性能指標(biāo)參數(shù),要了解、掌握他。
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
2930瀏覽量
117465 -
自動(dòng)駕駛汽車(chē)
+關(guān)注
關(guān)注
4文章
376瀏覽量
40829
原文標(biāo)題:自動(dòng)駕駛汽車(chē)開(kāi)發(fā)中 雷達(dá)選用原則的研究
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
汽車(chē)雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
使用PVA引擎優(yōu)化自動(dòng)駕駛汽車(chē)CV開(kāi)發(fā)流水線

豐田與NTT合作開(kāi)發(fā)自動(dòng)駕駛軟件
自動(dòng)駕駛汽車(chē)安全嗎?

豐田與NTT合作開(kāi)發(fā)自動(dòng)駕駛軟件,AI預(yù)測(cè)事故助力安全駕駛
激光雷達(dá)與純視覺(jué)方案,哪個(gè)才是自動(dòng)駕駛最優(yōu)選?
聊聊自動(dòng)駕駛離不開(kāi)的感知硬件
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛汽車(chē)如何識(shí)別障礙物
自動(dòng)駕駛汽車(chē)傳感器有哪些
揭秘自動(dòng)駕駛:未來(lái)汽車(chē)的感官革命,究竟需要哪些超級(jí)傳感器?
吉利與Foretellix合作開(kāi)發(fā)自動(dòng)駕駛汽車(chē)
未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛汽車(chē)技術(shù) | 車(chē)載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論