") 如何實現(xiàn)無傳感器初始位置檢測
如何實現(xiàn)無傳感器初始位置檢測
隨著真空吸塵器、洗碗機和冰箱等電機驅(qū)動設備和電動工具對節(jié)能和系統(tǒng)成本的要求日益提高,傳統(tǒng)內(nèi)置位置傳感器電機正逐漸被無位置傳感器無刷直流電機(BLDC)所取代。之所以會呈現(xiàn)這一趨勢,源于使用無傳感器控制直流無刷電機時,能夠?qū)崿F(xiàn)更小的尺寸、更高的外形設計靈活性、更低的成本、以及更佳的耐熱性。
但當無傳感器直流無刷電機處于靜止狀態(tài)時,通常的控制方法是無法利用感應電壓實現(xiàn)轉子位置檢測的。如果該瓶頸得以突破,那些需要平滑高速啟動、大扭矩和在啟動階段要求節(jié)能的應用,諸如電動工具、機床、運輸設備、機器人、風機、泵類等,就能夠在啟動階段不需要拉動過程,實現(xiàn)平滑和快速啟動,并同時獲得大扭矩和較高的電流效率。
為此,瑞薩電子在RL78/G14微控制器基礎之上,通過添加增強的電機控制功能,包括片上可編程增益放大器(PGA)/雙通道高速比較器(CMP)/電機控制輔助定時器(Timer RX)、豐富的模擬功能和紅外(IrDA)通信功能,推出了RL78/G1F微控制器。

圖1 RL78/G1F微控制器產(chǎn)品概念
RL78/G1F微控制器可以使用跟無傳感器120度傳導控制同樣的輸入輸出電路,包括脈寬調(diào)制輸出(PWM)電機控制輸出電路、電流檢測輸入電路以及相電壓輸入電路來控制BLDC電機,從而無需再采用傳感器或編碼器。當電機開始啟動時, 由于靜止狀態(tài)下加到一相的電流是可以被區(qū)分的,使得平滑和大扭矩的啟動成為可能,同時不會發(fā)生意外的反轉。這意味著,在電機速度為零時是可以檢測到轉子位置并反射到啟動控制上的。此外,它們還可以在沒有CPU干預的情況下執(zhí)行高速過流檢測和PWM強行輸出切斷,因此可以通過少量部件實現(xiàn)高度靈活的電機控制。
如何實現(xiàn)無傳感器初始位置檢測
利用兩種組合檢測處理步驟可以有效的檢測轉子初始位置(分辨率30°)
“
步驟1:利用比較器CMP1、定時器RX和相電壓輸入電路實現(xiàn)不超過180°的位置檢測。優(yōu)勢在于輸入電流小,處理時間短。
”
轉子的位置變化會導致電機各相端子之間呈現(xiàn)出不同的電感。當電壓施加在一個相端子上時,另一個相端子上的電壓會有不同的上升狀態(tài),這被用來檢測轉子位置。因為在360度的電角度里兩個周期的變化相同,所以這個方法可以在180度的電角度范圍內(nèi)識別位置。
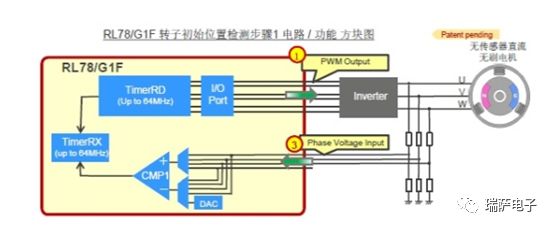
圖2 RL78/G1F轉子初始位置檢測步驟1電路/功能方框圖
具體做法是首先在U相上施加電源電壓,并測量V相電壓(VUV)達到門檻參考電壓(VREF1)時經(jīng)過的時間。再將VUV及VREF1相電壓檢測輸入傳送至比較器(CMP1)進行匹配檢測,并利用Timer RX的計數(shù)器值決定當VUV與VREF1相符的時間。Timer RX開始計數(shù),與Timer RD的PWM輸出同步,并與CMP1同步捕獲計數(shù)值。CMP1最多可使用四個切換外部輸入進行匹配比較。由于上述操作使用其中三個輸入,故可利用時間量測值達到可重復的結果。
在轉子的永久磁鐵磁場影響下,各相端子間電感L和定時器RX的計數(shù)值會根據(jù)轉子位置以相同的趨勢變化。通過端子之間的定時器RX計數(shù)值的大小關系,可以檢測出轉子位置,分辨率為30°。但是,考慮到這種關系會在360°范圍內(nèi)重復2個周期,因此轉子所處的那一個180°范圍會由極性判斷處理確定。
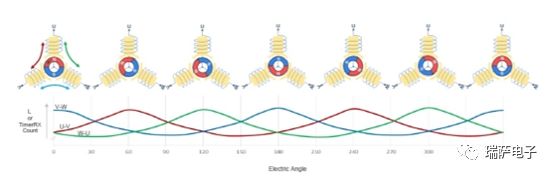
圖3 各相端子間電感和定時器的計數(shù)值會根據(jù)轉子位置變化
深度探討一下步驟1的原理,將有助于我們加深對該應用的理解。
當逆變器電路中所有MOSFET的狀態(tài)為OFF時,使用定時器RD的脈沖輸出,只打開其中一個高端MOSFET,結果電壓被施加到電機的一個端子上。于是,雖然電機另一端的電壓上升,但由于通向端子的電路主要來自MOSFET寄生電容,所以電壓上升具有時間常數(shù)。也就是說,電容器是由流過電機線圈的電流充電的,并且電壓根據(jù)狀態(tài)而升高。用于測量其端電壓的部分電壓被輸入到RL78/G1F的比較器CMP1的“+”側,由內(nèi)部DAC產(chǎn)生的參考電壓VREF1被設置在“-”側以通過CMP1,從電壓施加開始到該CMP1匹配的時間由定時器RX測量。
根據(jù)電機線圈的電感L開始流經(jīng)該線圈的電流受到限制,并且輸入到RL78/G1F的CMP1的電壓上升受到影響。例如,當L大時,電壓上升變慢,定時器RX測量值增加;當L較小時,電壓迅速上升,定時器RX測量值減小。
該測量是在三組電機端子之間的線路上進行的,并且基于定時器RX值的比較結果,轉子位置被確定為一個電旋轉中的一對相反的60°或30°區(qū)域。
定時器RX可以使計數(shù)開始與控制MOSFET的定時器RD同步,并且可以在CMP1匹配的定時自動捕獲計數(shù)值。另外,由于CMP1可以通過切換至四個外部輸入來檢測同一單元的一致性,所以可以在電機的三組端子之間以良好的重復性執(zhí)行該測量。與定時器RD一樣,定時器RX可以在CPU的兩倍速度下執(zhí)行最大操作,因此可以以高分辨率執(zhí)行測量,并且可以檢測到微小的時間差。
“
步驟2:利用可編程增益放大器PGA、ADC 和電流檢測輸入電路進行極性識別。相比步驟1,輸入電流較大,處理時間也較長。
”
步驟2采用的方法是電機永久磁鐵產(chǎn)生的磁通量與電流通過線圈產(chǎn)生的磁通量會導致線圈鐵芯材料磁飽和,從而使電流更容易流動,因此能識別永久磁鐵的磁極方向。由于此程序以電機電流作為微控制器的輸入電壓,故需要分流電阻。
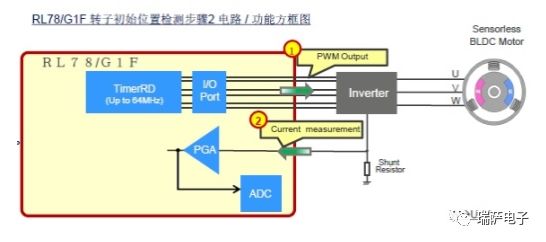
圖4 RL78/G1F轉子初始位置檢測步驟2電路/功能方框圖
依據(jù)處理步驟1的結果,可識別磁鐵指向方向的相位。此步驟中,在繞組+ve(一相)及-ve(兩相)之間施加特定電流,并持續(xù)固定的時間(tCONST)。利用可編程增益放大器放大該點(電流檢測輸入)的并聯(lián)電壓,并以A/D轉換器量測當電流從W流向U及V時的信號。接著,讓電流以反向流動相同的時間(tCONST),并以同樣的并聯(lián)電壓量測當電流從U及V流向W時的信號,再利用這兩個量測值間的大小關系決定永久磁鐵的磁通量方向。
線圈電流產(chǎn)生的磁通量和永久磁鐵的磁通量對線圈的芯材有影響。在下圖中,鐵心內(nèi)部的磁通量被I+方向的電流強化,I-方向的電流則減弱鐵心內(nèi)部的磁通量。隨著電流開始流動,電流隨著線圈電感的影響而逐漸增大,電流引起的磁通密度也相應地增加。當磁芯材料內(nèi)的磁通密度增加達到發(fā)生磁飽和時,線圈的電感減小并且電流變得容易流動。當電流的方向在增加磁通時,電流的行為開始受磁飽和影響的電流值較低,在這種情況下,電流更早容易流動。即在“I+”的情況下電流比“I-”更早容易流動。這樣,電流容易流動的時刻在“I+”和“I-”之間是不同的,并且在稍微超過該時刻的瞬間,“I+”的電流值大于“I-”。然后,通過ADC測量并比較,可以確定永磁體的極性。
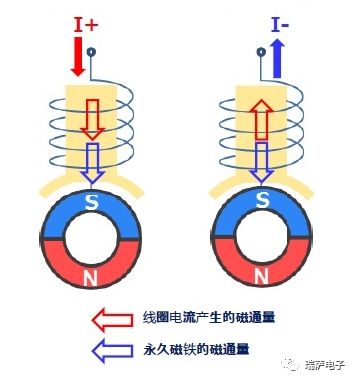
圖5 磁通量的顯示
我們沒有比較某個時間段之后的電流值,而是通過使用比較器CMP0和計時器比較直到電流達到發(fā)生磁飽和時的特定電流水平時間,再根據(jù)被檢測到的“I+”和“I-”差值判斷極性。
盡管僅通過對電動機的三相執(zhí)行該過程就能夠以60°的分辨率檢測轉子位置,但是這一過程比“檢測處理1”需要更長的時間和電流。通過“檢測處理1”之后,RL78/G1F能夠僅以一個相位進行磁極方向的處理,從而高效檢測轉子初始的位置。
演示套件
在瑞薩電子提供的RL78/G1F無傳感器電機控制演示套件中,電機控制電路由“RL78/G1F CPU板卡”和“用于RX23T的24V電機控制評估系統(tǒng)”逆變器板組成,初始位置檢測和轉子控制演示由“用于RX23T的24V電機控制評估系統(tǒng)”實現(xiàn)。
圖6 RL78/G1F無傳感器電機控制演示套件
在應用于初始位置檢測的處理1中(位置檢測不超過180°),考慮到必須要在短時間內(nèi)捕捉到電壓變化,因此電壓測量電路中不能有用于測量的帶有電容的濾波電容器。可是,由于轉動控制還需要濾波器,所以在RL78/G1F CPU板卡上增加了一個用于增加端口控制的濾波電容器電路。
而在旋轉控制演示中,針對直流無刷電機的無傳感器120度傳導控制,RL78/G1F支持兩種過零檢測的方法:使用A/D轉換器用于低轉速控制的非比較器法,以及使用CMP1用于高轉速控制的比較器法。在演示中,電機開始啟動時會首先執(zhí)行非比較器法,當轉速達到1500 rpm時平滑切換到比較器法,如果轉速降低到1450 rpm時,則會從比較器法切換到非比較器法。
-
微控制器
+關注
關注
48文章
7542瀏覽量
151316 -
傳感器
+關注
關注
2550文章
51035瀏覽量
753069 -
電機
+關注
關注
142文章
9000瀏覽量
145337
原文標題:媒體聚焦|一招讓你學會傳感器BLDC電機轉子位置檢測技巧
文章出處:【微信號:renesas_china,微信公眾號:renesas_china】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
無位置傳感器的直流無刷電機控制系統(tǒng)設計與實現(xiàn)
L78/G1F 無傳感器BLDC電機 初始轉子位置檢測
無位置傳感器的SRD調(diào)速系統(tǒng)的初始位置檢測
BLDCM無位置傳感器換相檢測和開環(huán)啟動的軟件實現(xiàn)
無位置傳感器無刷直流電動機控制方法及其DSP實現(xiàn)
無刷直流電機無位置傳感器控制系統(tǒng)研究_楊杰
基于C-Dump變換器的無刷直流電機的無傳感器位置檢測方法的DSP軟件實現(xiàn)
永磁同步電機初始位置檢測方法
基于電機無位置傳感器控制實現(xiàn)換相控制電路的設計

節(jié)氣門位置傳感器結構_節(jié)氣門位置傳感器檢測
使用霍爾效應傳感器針對篡改和移動終點位置檢測實現(xiàn)限制檢測






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論