") 探析工業(yè)以太網(wǎng)總線式多圈絕對(duì)值編碼器
探析工業(yè)以太網(wǎng)總線式多圈絕對(duì)值編碼器
最近幾年國(guó)內(nèi)市場(chǎng)小型伺服電機(jī)發(fā)展迅猛,現(xiàn)有伺服電機(jī)市場(chǎng)更多的關(guān)注在體積小而薄,分辨率高而價(jià)格低的編碼器上,對(duì)于“絕對(duì)值編碼器”的理解,也是僅停留在能“停電記憶”的“絕對(duì)值”其中的一個(gè)功能上。并且我注意到,即使連海德漢在會(huì)場(chǎng)一起展示的總線式多圈絕對(duì)值編碼器,也因?yàn)轶w積大而幾乎無人問津。這說明運(yùn)動(dòng)控制市場(chǎng)對(duì)編碼器的認(rèn)知理解是有不同的角度。
我一直在做編碼器應(yīng)用的服務(wù)與推廣、編碼器的研發(fā)與制造的角度,在此次會(huì)上從另外一個(gè)角度作了30分鐘的演講。下面是本次演講其中的一部分,由于30分鐘時(shí)間有限,在大會(huì)上有些預(yù)先準(zhǔn)備的內(nèi)容拿掉了,有些沒有時(shí)間展開說明,在下面也有機(jī)會(huì)可以再補(bǔ)充。以供運(yùn)動(dòng)控制的工程師們參考與討論。
一,運(yùn)動(dòng)控制產(chǎn)品對(duì)編碼器的基本要求
1,運(yùn)動(dòng)控制的基本目標(biāo):
高精度加工,高速響應(yīng)加工,多軸同步協(xié)作的加工,有可靠性高效的加工。
2,運(yùn)動(dòng)控制基本目標(biāo)對(duì)應(yīng)的編碼器基本要求是:
高精度、高速響應(yīng),準(zhǔn)確性、高效性,可靠性、安全性。
還要便宜。
3,高分辨率?只是為了位置環(huán)和速度環(huán)的高精度和高速響應(yīng)的一個(gè)手段。但是,超細(xì)分的高分辨率其實(shí)已經(jīng)偏離了對(duì)精度的基本要求,依賴算法補(bǔ)償已經(jīng)偏離了高速響應(yīng)基本要求。由于有傳動(dòng)減速機(jī)的掩護(hù),大量做小型伺服電機(jī)的工程師們還不能明顯看出這里面的問題。
4,停電記憶?只是為了高效,無需開機(jī)找零位的一個(gè)手段。但是如果是依賴計(jì)數(shù)器的計(jì)圈,尤其是停電后的微功耗管理下的計(jì)數(shù)圈數(shù),仍然存在計(jì)數(shù)錯(cuò)誤無法判斷的可能性,偏離了運(yùn)動(dòng)控制可靠性與安全的基本要求。由于很多是小型伺服電機(jī),這種可靠性與安全性帶來的隱患還不是很突出。在風(fēng)力發(fā)電這種大型設(shè)備上,已經(jīng)大量換下了電子多圈編碼器,這樣的問題并沒有引起運(yùn)動(dòng)控制工程師們的注意。
5,“能用就行,能用最經(jīng)濟(jì)的方式做出產(chǎn)品,或者做一件事,是展示工程師的本事。”這樣的觀念,在國(guó)內(nèi)工控行業(yè)很突出。但是這種思維方式很不工業(yè),很不“工程”,那是“農(nóng)民與作坊式”思維,要憑一點(diǎn)點(diǎn)經(jīng)驗(yàn)靠一點(diǎn)點(diǎn)運(yùn)氣。工業(yè)化的思維是需要有標(biāo)準(zhǔn)化、可流程化,可知與可控及容錯(cuò)性,減少甚至消滅制造過程中產(chǎn)品使用的不確定性,才能夠可復(fù)制,保證大規(guī)模的工業(yè)化生產(chǎn)。我在本次大會(huì)上再次提出了運(yùn)動(dòng)控制創(chuàng)新產(chǎn)品18個(gè)月反饋周期的觀點(diǎn)。
二,運(yùn)動(dòng)控制不可忽視的相關(guān)性
1,運(yùn)動(dòng)控制-伺服運(yùn)動(dòng)是動(dòng)態(tài)的,不是靜態(tài)的。
不能以靜態(tài)的測(cè)試方法得到的編碼器精度與分辨率,去理解伺服編碼器的應(yīng)用。如果是依賴于過度補(bǔ)償與算法的某些編碼器參數(shù),在伺服電機(jī)動(dòng)態(tài)時(shí)會(huì)怎么樣?在伺服電機(jī)長(zhǎng)期使用后,及使用中溫度提升之后會(huì)怎么樣?
2,運(yùn)動(dòng)控制,應(yīng)包含電機(jī)與傳動(dòng)部分,應(yīng)包含工藝輸出端負(fù)載的變化與意外,減少不確定。
如果用直驅(qū)電機(jī),當(dāng)然就可以消除傳動(dòng)部分帶來的困惑,但是直驅(qū)電機(jī)對(duì)輸出端負(fù)載變化的敏感性,其要做到可知與可控難度更大。由于沒有傳動(dòng)部分的掩護(hù)與杠桿作用,直驅(qū)電機(jī)輸出的力矩大電流大,力矩加速度環(huán)控制難度較大,對(duì)于編碼器的精度要求更高。
3,運(yùn)動(dòng)控制,應(yīng)包含電機(jī)-傳動(dòng)與其他的電機(jī)-傳動(dòng)的位置、速度關(guān)系,減少不確定。
當(dāng)多個(gè)電機(jī)在一起控制的時(shí)候,很多單個(gè)電機(jī)容易解決的問題,到了多個(gè)電機(jī)控制都要推翻重新來過,現(xiàn)有的同步控制器大部分是指令發(fā)出同步,反饋來至單個(gè)驅(qū)動(dòng)器,還不是多電機(jī)大系統(tǒng)的閉環(huán)。
4,我的參考意見,是在傳動(dòng)軸上加裝絕對(duì)值多圈編碼器。
當(dāng)然是要能夠在傳動(dòng)部分加裝編碼器,要求是加裝機(jī)械齒輪箱式的絕對(duì)值多圈編碼器,后面再展開理由。
直驅(qū)電機(jī)不需要再加裝編碼器,但要選擇高精度的伺服電機(jī)編碼器,注意不只是編碼器高分辨率,是編碼器的高精度!編碼器的高精度對(duì)于直驅(qū)電機(jī)的電流環(huán)極為重要,我在公眾號(hào)介紹電梯編碼器ERN1387文中已有講解,可以回過頭去看。
三,運(yùn)動(dòng)控制中同步控制的根本性問題
同步控制的根本,是多軸統(tǒng)一約定與反饋比較:
1,什么時(shí)候,各軸都能到達(dá)哪里,各軸響應(yīng)度如何?
2,統(tǒng)一對(duì)表(時(shí)鐘同步、TSN),統(tǒng)一對(duì)地圖(零點(diǎn)對(duì)齊,絕對(duì)值唯一性編碼)。
3,多軸同步控制不可忽視傳動(dòng)機(jī)械與負(fù)載可能的不同與變化。
4,由于是多軸在一起的控制,務(wù)必減少每一個(gè)軸上的不確定性。當(dāng)在單軸上的不確定性是小概率事件,而在多軸同步控制時(shí)就會(huì)成為大概率事件。
四,有簡(jiǎn)單三句話建議收藏
由于前面說的“伺服是動(dòng)態(tài)”的,在運(yùn)動(dòng)控制需要工業(yè)化思維的“可知、可控、可重復(fù)與可靠性”,那么下面三句話也許對(duì)運(yùn)動(dòng)控制就會(huì)很重要:
1,可以走硬件的永遠(yuǎn)比走軟件算法快,并且可靠。
2,并行算法總是比串行算法快,并且可靠。走硬件解決是“并行算法”思維。
3,編碼器的精度是硬件的,通過細(xì)分獲得的高分辨率是“串行算法”的;全行程絕對(duì)值編碼是“硬件”的“并行思維”,通過計(jì)數(shù)器累加增量的方式并記憶的是“串行思維”的。
在工業(yè)中,要做到減少不確定性,是要有準(zhǔn)確性的高速,才是最高效,最可靠的,也就是最經(jīng)濟(jì)的。
五,絕對(duì)值多圈編碼器的核心問題,是可靠性。
工業(yè)以太網(wǎng)的核心問題,是又多又快地容錯(cuò)性。
絕對(duì)值唯一性編碼的容錯(cuò)性給運(yùn)動(dòng)控制帶來的好處。
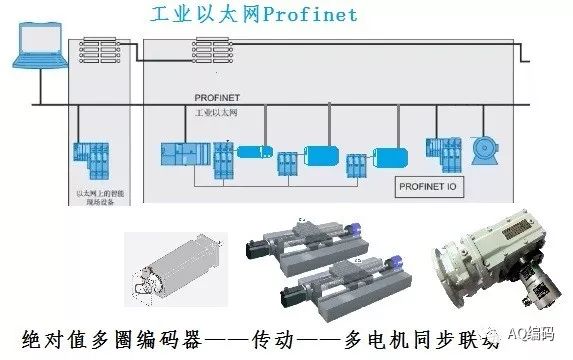
在傳動(dòng)輸出軸上加裝工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器,同步問題、高效與可靠性問題可以簡(jiǎn)單化。每一傳動(dòng)軸上可以獲得絕對(duì)值坐標(biāo)位置,無不確定性,可準(zhǔn)確定位,無需找零,容錯(cuò)性效率高。絕對(duì)值坐標(biāo)中與其他運(yùn)動(dòng)軸的相互位置關(guān)系確定,可很容易實(shí)現(xiàn)多軸同步、聯(lián)動(dòng)。
全行程絕對(duì)值編碼的機(jī)械齒輪箱絕對(duì)值多圈編碼器,它的核心就是可靠性,唯一性編碼,在使用中首次調(diào)試對(duì)齊零位后,就不應(yīng)該再有錯(cuò)碼再有零點(diǎn)位置跑丟。由于裝在傳動(dòng)后的輸出工藝端,它的精度與響應(yīng)直接對(duì)應(yīng)加工精度與響應(yīng),它與其它軸之間的關(guān)系也很簡(jiǎn)單,大家在首次零點(diǎn)對(duì)齊后,各軸的絕對(duì)值坐標(biāo)就是確定的,不受傳動(dòng)誤差、傳動(dòng)機(jī)械磨損、加工工藝端負(fù)載的變化的不確定性的影響。各軸的位置關(guān)系僅僅與其運(yùn)動(dòng)控制有關(guān),這是真實(shí)的多軸同步控制系統(tǒng)大閉環(huán)。
在以多軸運(yùn)動(dòng)控制的思考中,應(yīng)盡量避免各單軸的不確定性,已經(jīng)沒有時(shí)間去驗(yàn)證編碼器反饋數(shù)據(jù)是否有錯(cuò),是否需要等單個(gè)哪一軸去找一下零位。在多個(gè)運(yùn)動(dòng)軸控制中,只要有一個(gè)軸數(shù)據(jù)出錯(cuò),或者無法判斷是否出錯(cuò),都將帶來整個(gè)系統(tǒng)的混亂、停機(jī),甚至事故。因此,我一再堅(jiān)持的電子多圈是以計(jì)數(shù)器計(jì)數(shù)多圈的,尤其是在停電狀態(tài)下的微功耗計(jì)數(shù)圈數(shù),其存在的不確定性。既然要用絕對(duì)值多圈編碼器的功能,就不可忽視絕對(duì)值多圈編碼器的核心問題,是容錯(cuò)性可靠性,編碼原理上不可有不確定性。
工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器
工業(yè)以太網(wǎng),是以互聯(lián)網(wǎng)硬件以太網(wǎng)基礎(chǔ)上實(shí)現(xiàn)工業(yè)多數(shù)據(jù)的傳輸。因互聯(lián)網(wǎng)的高速發(fā)展,獲益于滿足社會(huì)需求的低成本與普惠性,其大規(guī)模化成功應(yīng)用帶來的好處,是多點(diǎn)數(shù)據(jù)連接同時(shí)在線傳輸?shù)挠布杀镜停夹g(shù)成熟。工業(yè)以太網(wǎng)既要傳承互聯(lián)網(wǎng)硬件成功“普惠性技術(shù)成熟”的秘訣,又要兼顧工業(yè)數(shù)據(jù)傳輸?shù)目煽啃砸螅瑢?duì)于機(jī)器類數(shù)據(jù)不確定性錯(cuò)誤的識(shí)別與容錯(cuò),糾錯(cuò)。
? Profinet,PI協(xié)會(huì)及德國(guó)西門子主導(dǎo)的工業(yè)以太網(wǎng),實(shí)時(shí)工業(yè)以太網(wǎng), RT(實(shí)時(shí))通訊協(xié)定是針對(duì)PROFINETCBA及PROFINET IO的應(yīng)用,其反應(yīng)時(shí)間小于10ms。IRT(等時(shí)實(shí)時(shí))通訊協(xié)定是針對(duì)驅(qū)動(dòng)系統(tǒng)的PROFINETIO通訊,其反應(yīng)時(shí)間小于1ms。在運(yùn)動(dòng)控制應(yīng)用中,周期小于32us
? Ethercat,ETG協(xié)會(huì)及德國(guó)倍福主導(dǎo)的工業(yè)以太網(wǎng),基于以太網(wǎng)物理基礎(chǔ)的分布式總線技術(shù),周期時(shí)間短,優(yōu)于32us。提供分散式時(shí)鐘機(jī)制,同步時(shí)鐘找回。
? 以太網(wǎng)更快,可連接更多設(shè)備,傳輸更大的數(shù)據(jù)量。
? 工業(yè)以太網(wǎng)的發(fā)展,既是工業(yè)自動(dòng)化需要,又是向工業(yè)互聯(lián)網(wǎng)的發(fā)展趨勢(shì)。

六,工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器,在多運(yùn)動(dòng)軸同步控制中突出的優(yōu)勢(shì)
在傳動(dòng)軸上加裝工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器,在同步控制中帶來了明顯的優(yōu)勢(shì):
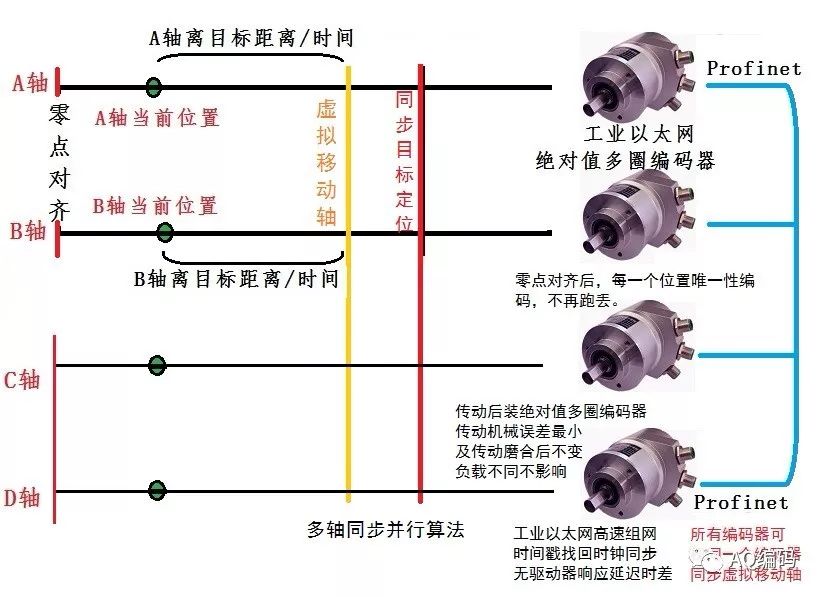
1,每一個(gè)運(yùn)動(dòng)軸,在調(diào)試初始化零點(diǎn)對(duì)齊后,絕對(duì)值坐標(biāo)不再改變,是幾乎永久性可確定的,每個(gè)軸與其他軸的位置關(guān)系,在絕對(duì)值坐標(biāo)上是幾乎永久性可確定的。
2,用工業(yè)以太網(wǎng)將所有傳動(dòng)軸上的絕對(duì)值編碼器高速聯(lián)網(wǎng),時(shí)鐘同步找回時(shí)間同步點(diǎn),所有外掛的絕對(duì)值多圈編碼器可視在同一個(gè)“同時(shí)”對(duì)齊的絕對(duì)值位置坐標(biāo)上。
3,以此絕對(duì)值位置坐標(biāo),虛擬一個(gè)移動(dòng)軸,所有運(yùn)動(dòng)軸與此虛擬移動(dòng)軸跟隨,同步跟隨。這是并行算法思維。
4,調(diào)試中找到響應(yīng)度最慢的那個(gè)軸,虛擬軸以照顧那個(gè)最慢的軸,或者稱為“主軸”,其他所有運(yùn)動(dòng)軸與虛擬運(yùn)動(dòng)軸跟隨同步,相當(dāng)于跟隨“主軸”同步。
5,由于以太網(wǎng)的快速及同步時(shí)鐘的找回,所有運(yùn)動(dòng)軸的同步計(jì)算相當(dāng)于是并行的,與傳動(dòng)誤差與磨損無關(guān),與負(fù)載不同負(fù)載變化無關(guān),不確定性最小。運(yùn)動(dòng)同步控制算法簡(jiǎn)單,項(xiàng)目成功性高。
6,調(diào)試時(shí)有絕對(duì)值位置坐標(biāo)可做參考,可做記錄,調(diào)試成功后不再改變。調(diào)試人工低,不需要返回再調(diào)試的人工低,可靠性安全性高。減少了不確定性,最終是大大節(jié)省項(xiàng)目成本與用戶使用成本的。
運(yùn)動(dòng)控制的多軸同步控制,如果機(jī)械上有條件,就在傳動(dòng)軸上加裝工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器(必須是機(jī)械齒輪箱式的,不然就顯得多此一舉了),猶如你打游戲過關(guān)時(shí)加了“外掛”了 ,多開了一個(gè)“天眼”,將前面要做的事看得清清楚楚,輕松過關(guān)。
這就叫“升維思考,降維打擊”。游戲術(shù)語
我不打游戲,我只是研究過史玉柱做游戲成功的秘訣——做游戲免費(fèi),賣裝備賺錢。不舍得買好裝備的打游戲者,很難成為游戲高手,是去送分的。你要把裝備做好了,去成就你的客戶,你就有機(jī)會(huì)賺錢。這個(gè)被發(fā)現(xiàn)的秘密分享給大家。
傳動(dòng)軸上加裝編碼器的選擇,注意問清楚必須是機(jī)械齒輪箱式絕對(duì)值多圈編碼器,這是我們的用戶提到的,在國(guó)產(chǎn)寶馬汽車生產(chǎn)線上與德國(guó)工程師合作,德國(guó)工程師特意關(guān)照的要求。沒有電池,沒有韋根。
-
編碼器
+關(guān)注
關(guān)注
45文章
3638瀏覽量
134426 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5419瀏覽量
171598
原文標(biāo)題:運(yùn)動(dòng)控制中工業(yè)以太網(wǎng)絕對(duì)值多圈編碼器的意義
文章出處:【微信號(hào):gongkongBBS,微信公眾號(hào):工控網(wǎng)智造工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
種常用絕對(duì)值編碼器的優(yōu)缺點(diǎn)
絕對(duì)值編碼器安裝
絕對(duì)式編碼器的特點(diǎn)_絕對(duì)值編碼器應(yīng)用
雷恩大通孔多圈絕對(duì)值編碼器的特點(diǎn)
絕對(duì)值編碼器之單圈值型編碼器和多圈值型編碼器之間的區(qū)別及在回程傳感器上如何進(jìn)行大臂水平旋轉(zhuǎn)角度測(cè)

什么是絕對(duì)值編碼器?
增量式編碼器和絕對(duì)值編碼器有哪些區(qū)別?

一體式伺服中的編碼器起什么作用?什么時(shí)候使用多圈絕對(duì)值編碼器?

26位多圈絕對(duì)值編碼器是什么?

單圈和多圈絕對(duì)值編碼器哪個(gè)容易受到斷電的影響呢?
BissC絕對(duì)值編碼器在EtherCAT運(yùn)動(dòng)控制器中的應(yīng)用
增量編碼器與絕對(duì)值編碼器的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論